




 广告
广告





















































百度Apollo车路协同自动驾驶典型实践场景和技术优势

-
路端可发挥长时间观测和场景理解的优势,同时结合云端多源数据输入,判断前方阻塞场景类型及车辆状态属性;
-
如主车所在车道前方因施工占道、车辆异常停滞(如车辆故障、违章停车等)阻塞车道,且旁边车道可供主车绕行通过时,给出主车绕行通过策略建议,避免不合理停滞。
应用效果:
如图6.36所示,通过VICAD可以帮助自动驾驶车辆顺利通过阻塞场景。

图 6.36 施工占道跨黄实线绕行
(五)路口内施工绕行问题描述:
如图6.37所示,自动驾驶车辆行驶到无车道线刻画的道路区域(如路口中央区域),有阻塞类事件发生(如施工区域、异常停滞车辆),需重新规划行驶轨迹绕行通过。由于阻塞事件本身场景较为复杂,同时所在位置为无车道线刻画的道路区域(如路口中央区域),主车无变道或绕行策略的参考车道信息, 故无法执行绕行决策,造成车辆不合理停滞。

图 6.37 路口内施工
场景原理:
-
路端发挥场景理解和长时观测的优势,获取道路阻塞区域类型、区域范围、区域分布及阻塞区域周边车流状态;
-
路端或云端系统根据阻塞区域周边历史车流轨迹数据,选择最优通过策略,生成适用于主车通行的推荐轨迹引导线及速度建议,发送给车端;
-
车辆按照路云下发的轨迹引导线行驶脱离阻塞,如图6.38所示。

图 6.38 路口内施工绕行场景
应用效果:
自动驾驶车辆顺利绕行通过路口阻塞区域。
(六)合作式代客泊车问题描述:
无论是L2还是L4车辆在面对泊车场景时,因停车场环境复杂、定位信号缺失等问题可能会存在安全隐患。此外,还需花费大量的时间寻找空闲车位导致效率低下,甚至出现排长队的情况。
场景原理:
-
对停车场内合作式泊车巡航道路和专属车位实现全面覆盖,对停车场内车辆、行人、障碍物等目标进行检测,并实时监测停车场车位占用情况;
-
当人工主动申请或者车辆主动申请合作式泊车时,云端结合车端和场端的感知数据进行全局调度,给出全局导航路线支持车辆前往最近的空车位;
-
车辆收到调度信息后进入低速自动驾驶状态,能结合停车场的实际情况,实现停车场内低速自动驾驶,包含:直道巡航、弯道巡航、路口通过、上下坡、减速带通过、低速跟车、固定场景障碍物绕行、定点停车等功能;
-
当停车场内有弯道盲区时,场端智能终端会将计算结果传给车端,车辆可以主动减速慢行避免碰撞。
应用效果:
合作式代客泊车可以帮助车辆快速找到停车位,并且在驾驶员不参与操控的条件下,实现车辆自动驶入和驶出停车位。图6.39-6.41分别展示了百度AVP代客泊车在北京亦庄的建设情况。
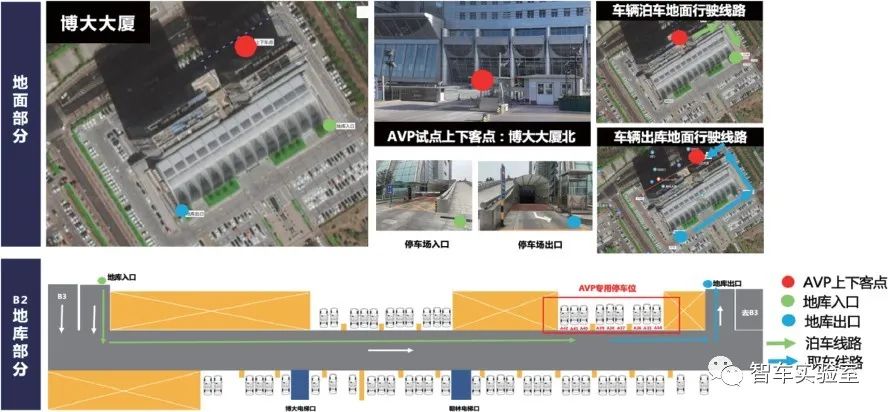
图 6.39 北京亦庄管委会AVP车位路线示意图

图 6.40 北京亦庄管委会地面&地下AVP专用停车位

图 6.41 AVP智能套件示意图
(七)编队行驶
问题描述:
自动驾驶编队行驶场景中,编队组织形式为编队领队车辆及编队成员车辆,编队领队车辆根据云端控制指令,实现发起编队或解散编队;成员车辆决定是否加入或离开编队。
场景原理:
1)编队实现方式:在组成编队之前,编队头车确认发起编队的请求后,会将本车的目的地、编队ID、编队速度、跟车距离等信息实时广播给所有周边车辆,周边车辆确认加入该编队后,根据跟车对象位置和距离信息重新规划路径,计算并控制速度合入编队,直到加入编队后,按照编队统一推荐的规划信息(推荐速度、推荐车距、推荐车道)保持一致的行驶状态;
2)编队解散方式:编队领队车辆接收到云端的解编消息,广播解编请求给编队各车;成员车辆自动离开编队,离开编队后重新规划路径驶向原目的地。

图 6.42 编队行驶场景
- 下一篇:标准 | SAE J3101车辆的硬件保护安全(1)
- 上一篇:地图参考位置协议



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
