




 广告
广告





















































百度Apollo车路协同自动驾驶典型实践场景和技术优势
2022-12-25 17:54:52· 来源:汽车测试网

应用效果:
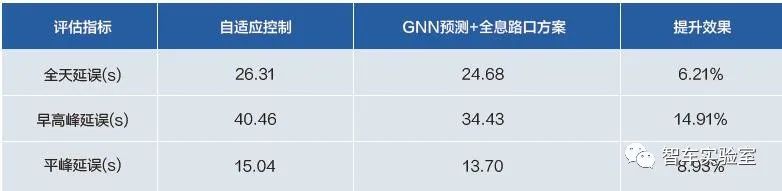
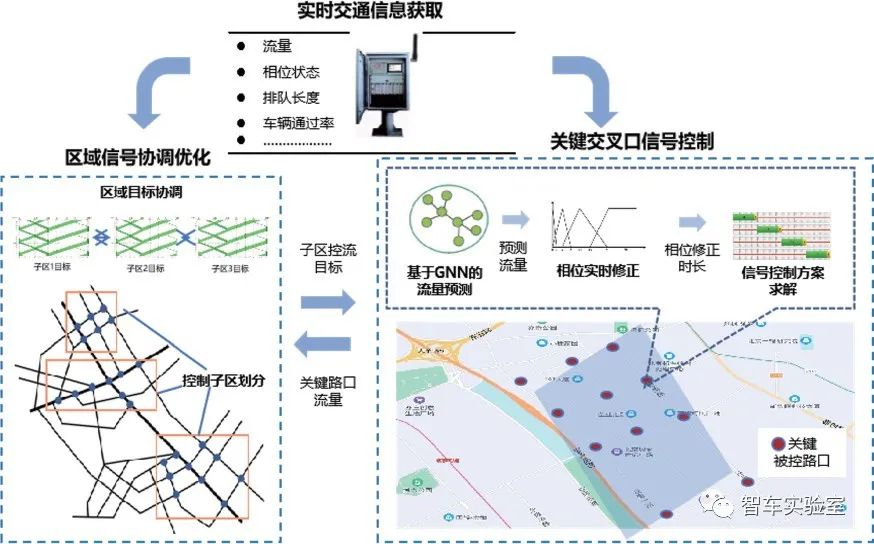
基于北京亦庄各个路口的实际交通流数据,分别采用自适应控制方法,以及基于GNN的数据预测 与补全方法(原理见图6.48),对区域信号灯进行优化控制性能比较,如表6.4所示,全天延误表示0点至24点内的平均延误;早高峰延误表示早7时至9时内的平均延误;平峰延误表示10时至16时 内的平均延误。结果表明,基于GNN的数据预测与补全方法,在不同时段内均可有效提升交通通 行效率,降低车均延误。
表 6.4 基于GNN预测的区域信号控制与自适应区域信号控制对比(亦庄)
图 6.48 基于GNN流量预测的区域信号控制示意图
- 下一篇:标准 | SAE J3101车辆的硬件保护安全(1)
- 上一篇:地图参考位置协议



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
