




 广告
广告





















































百度Apollo车路协同自动驾驶典型实践场景和技术优势

百度Apollo在全面满足行业已发布标准的基础上,结合已落地项目开展了大量V2X车路协同应用测试和先导应用,以下列举4个大类19个小类的典型协同感知、决策规划和控制应用场景,见表6.3。
表 6.3 百度Apollo典型应用场景举例

6.2.1 高精地图实时更新实践
在百度Apollo的落地实践中,高精地图为自动驾驶感知、决策规划和控制等提供一致的定位和环境语义信息,是自动驾驶车辆感知辅助、高精定位和安全的决策规划的基础。
(一)地图要素变更-交通信号灯问题描述:
在自动驾驶高精地图中,信号灯是地图的重要要素之一,但路口信号灯经常会发生安装位置、运行状态等变更,如果变更信息没有及时同步到车辆,在路口处容易出现信号灯无法识别的情况,导致车辆在路口处退出自动驾驶状态,或造成安全事故。
a)路口信号灯故障,设置临时信号灯 b)路口新建信号灯,与原信号灯位置不一致图
6.9 路口信号灯现实变更场景
场景原理:
在车路协同感知的基础上,可以借助V2X通信对高精度地图进行更新,辅助车辆在特定区域准确检测信号灯信息,帮助车辆安全通过路口。具体逻辑和流程如下:
-
以某一特定路口为例,如图6.10所示,信号灯从安装在路口中心的临时信号灯,更改为安装在交通信号灯杆的横杆位置;
-
路端检测到变更信息后,会将新的信号灯位置更新发送给地图平台,图商通过地图编译后,可通过OTA方式进行高精地图的版本升级,地图升级后的车辆经过该段道路时,可以通过地图获取信号灯正确位置;
-
在地图版本更新之前,通过变更路口的车辆可通过V2X收到路端发送的当前最新的路端局部地图信息,包含新的信号灯位置信息,以及信号灯的灯组、灯色与相位等信息,车辆会根据获取的信号灯位置和灯态信息进行驾驶行为决策。

图 6.10 信号灯位置现实变更
(二)地图要素变更-车道线变更
问题描述:
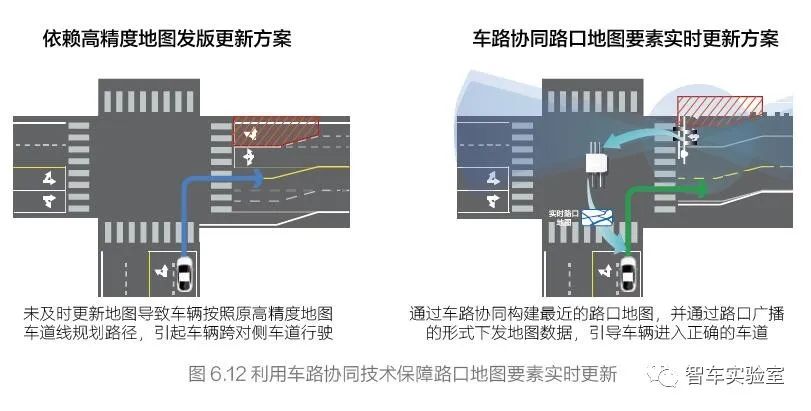
如图6.11所示,由于长期施工的原因,需要对车道线进行重绘,可能会出现车道数减少、车道变窄、车道弯曲等复杂的地面标识变化,同时还有可能出现原有车道线未清理干净的情况。对于强依赖高精度地图的自动驾驶车辆,在如此复杂的车道要素变化情况下,地图未能及时更新,非常容易出现车道线感知错误,从而导致不按导向箭头行驶、压车道线行驶、跨越对向车道行驶等危险驾驶行为。

图 6.11 道路车道线重绘场景
场景原理:
-
路端基于车道线的定点高频检测,及时发现车道线变化,自动更新路端自有路口局部地图的车道要素,同时利用定点连续观测,识别车辆的可通行方向和流向,修正车道的行驶导向属性,记录车道线的变更信息和变更时间;
-
在车辆进入V2X广播范围后,路端向车辆播发当前路口局部地图,包含车道标线、停止线、信号灯等要素信息,以及这些要素信息的置信度;
-
车端收到数据后,结合自身感知能力,安全通过车道线变更路口(如图6.12)。
综合应用效果:
车道线重绘后,高精度地图及时更新,在首辆车经过路口前即对于车道线进行识别,并更新局部路口的车道线,同时触发地图版本更新,保证首辆自动驾驶车辆正常通过。
6.2.2 车路协同感知实践
(一)路端信号灯融合感知
AD信号灯感知问题描述:
道路上经常会遇到异形、多语义或带倒计时的信号灯,自动驾驶车辆容易受到环境影响(遮挡、逆光),或在自身感知能力下降(感知失效)的情况下,不能准确识别路口信号灯信息,导致出现闯红灯或者交通事故,降低交通效率。
无信号灯协同感知时,路口信号灯被大车遮挡,容易闯红灯或发生安全事故
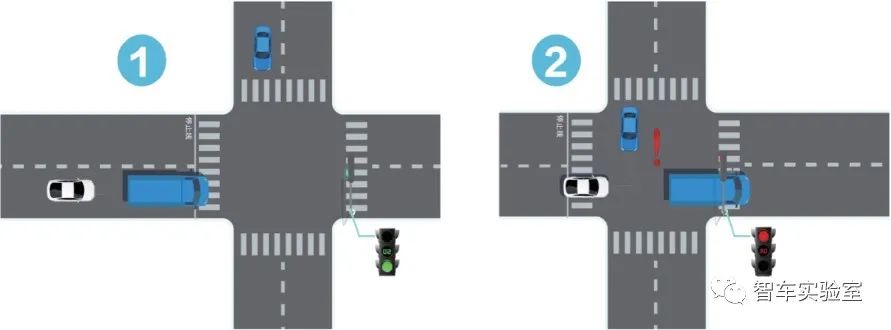
图 6.13 路口无信号灯协同感知
超视距/遮挡信号灯协同感知:
通过路端融合感知、信号灯数据接入、云端信号灯数据对接等技术实时获取信号灯灯色和倒计时信息,经多源信号灯数据融合处理后,通过V2X技术发给自动驾驶车辆。车辆可在距信号灯很远的位置提前获取信息,提前进行决策控制,降低交通事故风险。
有信号灯协同感知时,车辆实时获取信号灯数据,避免发生闯红灯或交通事故
图 6.14 路口有信号灯协同感知
具体案例:
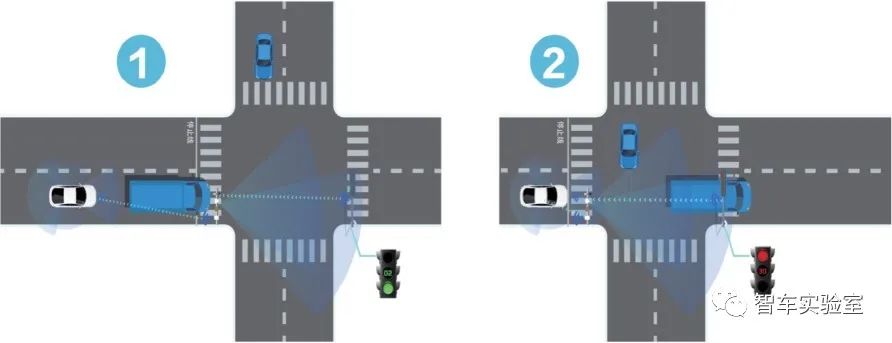
前方大车遮挡信号灯时(如图6.15),可通过VICAD信号灯协同感知实时获取准确的路口信号灯灯色和倒计时数据,以便车辆提前做出判断和决策控制,避免出现闯红灯或者急刹。

图 6.15 信号灯遮挡场景
- 下一篇:标准 | SAE J3101车辆的硬件保护安全(1)
- 上一篇:地图参考位置协议



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
