




 广告
广告





















































自动驾驶车辆的系统架构

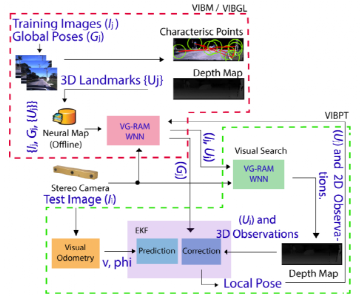
图9 基于神经网络的定位
VIBML系统架构:VIBM子系统(红色轮廓)负责映射(它使用VG-RAM来学习由图像、全局姿态和表示一个地方的3D地标集组成的三元组);VIBGL子系统(也呈红色轮廓)负责系统启动和连续全局定位(基本上从VIBM的VG-RAM恢复全局姿态);VIBPT子系统(绿色轮廓)负责校正全局姿态估计,并随着时间的推移跟踪新的姿态。
1.2静态障碍物绘制
静态障碍物(为非地图上显示的物体)测绘子系统负责计算得到自动驾驶汽车的环境中的障碍物地图。该子系统是确保无人驾驶车安全地在公共道路上导航而不与障碍物(如,路标、路缘石)碰撞的基础,区分汽车自由(可穿越)空间。障碍物地图则主要表示汽车可能或不能导航的地方的相关信息内容。无人驾驶车在行驶过程中必须始终处于自由空间。障碍图是通过测绘(mapping)期间的传感器数据得到,并存储为结构化信息以便在以后的无人驾驶操作阶段中使用。
状态空间的表征通常区分为拓扑表示和度量表示。拓扑表示将状态空间建模为图形,其中通过节点标识重要位置(或特征),并且用边缘表示它们之间的拓扑关系(如位置、方向、接近度和连通性)。这些分解的解决方案取决于环境的结构。度量表示通常将状态空间分解为有规则间隔的单元格。此分解不依赖于要素的位置和形状。度量空间分辨率往往高于拓扑空间分辨率。这种多功能性和效率使它们成为最常见的空间表示。
1.2.1离散空间度量表示
(1)状态空间最常见的表现之一是占据栅格图(OGM)。OGM将空间离散为固定大小的单元格,通常为分米级别。每个单元格包含占用与其相关的区域的概率。使用传感器数据为每个单元独立更新占用概率。为了简单和高效的目的,可以将表征障碍物的3D传感器测量投影到2D地平面上。独立性的假设使得OGM算法变得快速而简单。但是,它会生成稀疏状态空间表征,因为只有传感器到达的那些单元格才会更新。
一种在多层表面地图上应用蒙特卡洛定位的方法来表示2D OGM中占用的不同高度范围。该方法是一种新的技术组合,以在户外环境中有效地定位移动机器人。该方法使用粒子过滤器,并将距离测量值与多级曲面图进行匹配。并且提出了概率运动和观测模型,并描述了如何在概率定位方案中使用这些模型。此外,其中还提出一种主动定位方法,该方法能够通过仅考虑整个粒子集的聚类子集来有效地确定适当的传感器方向。MLS地图更准确地表示垂直结构,并可以处理机器人可以穿过的多个表面。如下图10所示,其中左图为普通立体图,右图为经过多层表面地图(MLS)。
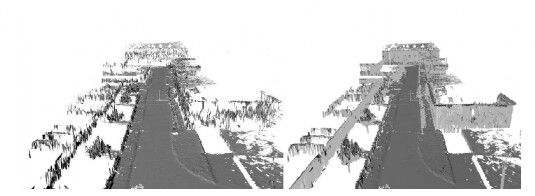
图10 多层表面地图定位
(2)使用GPS、IMU和LIDAR数据生成高分辨率红外地面图(high-resolution infrared remittance ground map)。该方法将环境建模为概率网格,而不是将其作为固定的红外汇值(infrared remittance values)的空间网格,从而将每个单元表示为其自身在红外汇值(infrared remittance values)上的高斯分布。随后,贝叶斯推断能够优先加权地图中最可能是静止的且具有一致角度反射率的部分,从而减少不确定性和严重的错误。此外,通过使用离线SLAM对齐同一环境的多个通道(可能在时间上相隔几天甚至几个月)。该算法在各种动态环境中根据概率地图定位车辆,验证了该方法的有效性,在10cm范围内实现RMS精度。
构建地图的最终目标是获得观察环境的网格单元表示,其中每个单元存储在该位置观察到的平均红外反射率以及这些值的方差。可分三个步骤生成这样的地图:首先,对所有轨迹进行后处理,以使重叠区域对齐;第二,我们校准每个激光束的强度返回,使光束具有相似的响应曲线;最后,将校准后的激光从对准的轨迹返回到高分辨率概率图中。下图11为不同红外反射率的高分辨率概率图。

图11 不同红外反射率的高分辨率概率图
(3)另一类是基于八叉树的地图。该地图用于存储具有不同3D分辨率的信息(如图12所示)。与具有不同3D分辨率的OGM相比,OctoMaps(基于八叉树的地图)仅存储观察到的空间,因此在存储器消耗方面更有效。然而,OctoMaps以统一和离散的方式处理传感器数据的更新和障碍物占用的估计。因此,它们比具有统一占用率的OGM慢。尽管OctoMaps在内存消耗方面具有显着优势,但是在无人驾驶车的实时场景中,强大的计算复杂性使该方法无法实现。
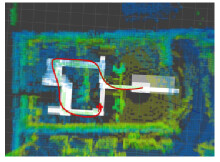
图12 基于八叉树的地图
1.2.2连续空间度量表示
(1)一种希尔伯特映射的新公式,其中通过逐步融合局部重叠的希尔伯特映射来构造全局占用图。不是为整个地图维护一个单一的监督学习模型,而是用机器人的每一次距离扫描来训练一个新模型,并对机器人感知领域上的所有的点进行查询。该方法将分类器的概率输出视为传感器,使用传感器融合来合并局部地图。该公式允许希尔伯特映射在传感器观测之间重叠的真实世界映射场景中增量使用。该方法应用于三维地图构建,并使用真实和模拟的三维距离数据进行评估。
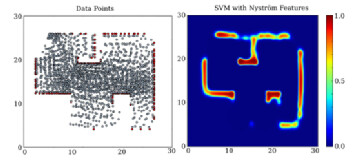
图13 基于希尔伯特映射的全局占用图
- 下一篇:利用内省学习和推理增强基于栅格的运动规划
- 上一篇:专利揭秘上汽“躺式”电池安全设计



编辑推荐




最新资讯
-
货车侧滑检测异常数据集群的成因分析 ——
2025-04-09 15:32
-
网络研讨会 | 4月16日HBK智能传感器
2025-04-09 12:21
-
褚教授课程笔记 | 工作变形分析(Operating
2025-04-09 12:19
-
深度讲解仰望U7水平对置发动机
2025-04-09 12:15
-
重磅!东风汽车重大突破
2025-04-09 12:15
