




 广告
广告





















































自动驾驶车辆的系统架构

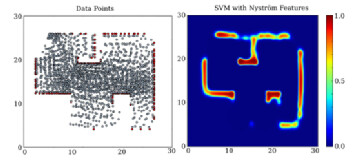
图14 连续占用映射建图方法
1.3道路绘制
道路映射子系统负责收集自动驾驶汽车周围道路和车道的信息,并在具有几何和拓扑属性(包括互连和限制)的地图中表示这些信息。道路绘制子系统的主要是路线图表示和拓扑表示。
1.3.1地图表示
路线图通常也是分为度量图和拓扑图。
1.3.1.1度量表示:
道路地图的简单度量表示是通过栅格地图表示。栅格地图是将环境离散化为固定大小的单元的矩阵。其中固定大小矩阵中包含关于是否属于道路的信息以及移动到其相邻区域单元的成本。道路网格地图简单易懂。但是,如果在路线图的大区域内移动成本是均匀的,那么使用网格表示可能需要浪费地存储空间和处理时间。
路径点( waypoints)序列是在大型道路栅格图中压缩路径描述的一种替代方案。路径点指的是沿着道路栅格图中的路径的点。路径点序列可以手动定义或从道路网格地图中自动提取。在于2005年DARPA挑战赛中,提出了路线数据定义文件(RDDF)。RDDF是一个格式化文件,包含路径点坐标和无人驾驶车的运行路径,指定的其他相关信息(纬度、经度、横向边界偏移和航向速度)。
(1)一种路线图用于推断无人驾驶车IARA在城市道路上的车道位置和相关属性(栅格地图和RDDF路径),如图15所示。IARA的道路栅格地图包含方形单元格0.2×0.2米。通道的每个单元都被分配上编码。编码从1到16表示了从单元到车道中心的相对距离以及单元中存在的车道标记(损坏、固定或无)的类型。IARA的RDDF路径包含0.5米间隔的航路点,并通过一种算法从道路网格图中自动提取,该算法奖励更靠近车道中心的单元。
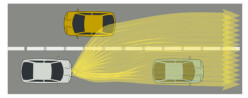
图15 道路栅格地图
1.3.1.2拓扑表示
路面图的更复杂的表示是通过拓扑图。拓扑图将环境描绘为图形模型,其中顶点表示位置,连线表示位置之间的拓扑关系。拓扑图可以包含更复杂的信息,包括多个车道,车道交叉点和车道合并。
(1)2007年DARPA城市挑战赛中提出了路网描述文件(RNDF),这是一个拓扑图,定义为格式化文件,用来指定无人驾驶车操作的路段。根据该文件,道路网络包括一个或多个段,其中每个段包括一个或多个通道。段主要用来表示车道数、街道名称和速度限制。车道用以表示车道宽度、车道标记和一组路径点。车道之间的连接以出口和入口路径点表示。
RNDF定义无人驾驶车辆可以访问的道路信息,其中点的信息包括路点(道路上带有二维坐标信息的点)和特征点(指无人驾驶车辆完成指定比赛任务必须识别的交通信号标志所在的点,这些点可以是位于道路上的路点,也可以是位于路边的点,用三维坐标表示);线的信息包括标志线的宽度、颜色、条数、道路的宽度和车道数;面的信息包括特定的区域(如自由行驶区域和自主泊车区域等)因此,路网文件包含描述路段和描述区域两个方面的信息内容。
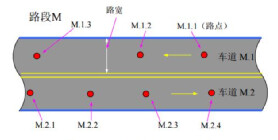
路网文件包含一段或多段道路,其中每段道路又包含一条或者多条车道。在路网文件中,“segment”表示与路段有关的信息(如路段名称、路段包含的车道数等),“lane”表示与车道有关的信息(如车道名称、宽度和车道上路点的顺序集合),路点在路网文件中位于车道的内部。路点、车道和路段的表示方法如图16所示,其中红色圆点为路点,并以“M.N.P”表示,其中M、N和P分别表示路段号、车道号和该路点序号,而车道和路段分别以“M.N”和“M”的方式表示。
如果两条道路相连,在车道的衔接处分别用“Entry Way Point”和“Exit Way Point”表示车道连接处的入口点和出口点。一个出口点可能对应一个或者多个入口点,出口点和入口点可以设定在车道的开始、中间或者末端位置,这取决于实际测试任务的需要。图17表示交叉路口处的一种路点连接情况,其中出口点D在车道2.2的末端,它与入口点A和E(分别位于车道1.1和1.2)相连,表示无人驾驶车辆可以有两个选择;出口点B和F分别位于车道1.2和车道1.1的中间,与车道2.1的入口点C相连。
此外,还有两种特殊情况:1)当一条道路是环形道路时,它的入口点和出口点可能在同一条车道上;2)当遇到一条死路时,这条车道上的最后一个路点可能指向临近车道上的第一个最近的路点,表明无人驾驶车辆须反方向行驶,即执行U-Turn。在路网文件中停止点用“Stop”来描述。如图17所示,相应的路点D附近有一条停止线,它垂直于无人驾驶车辆的行进路线。
图17 T型路口
(2)一种用于从校准的视频图像和移动车辆获取的激光测距数据中检测和估计城市道路网络中多车道特性的系统。该系统在多个处理器上分几个阶段实时运行,将检测到的道路标记、障碍物和路缘融合为附近车道的稳定非参数估计。该系统结合了所提供的分段线性道路网络的元素作为弱先验。
该方法在几个方面都是值得注意的:它检测和估计多条车道;它融合了异步、异构的传感器流;它处理高曲率道路;并且它不假设车辆相对于道路的位置或方向。
寻道方法包括三个阶段。在第一阶段,该系统通过激光雷达的数据,检测并定位每帧视频中所绘制的道路标记,以降低误报率。第二阶段处理道路检测到的车道线以及激光雷达检测到的路缘,来估计附近车道的中心线。最后,在产生一个或多个非参数车道输出之前,对任何检测到的中心线进行滤波、跟踪和融合。该方法的数据流如图所示。
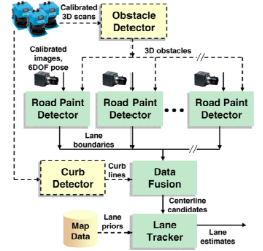
图18 车道线融合对于每帧视频,
根据从实时IMU数据推断的地平面的投影,沿着每行的像素网格对内核进行采样。然后将核与来自每行的图像数据卷积以产生匹配滤波器的输出。当核宽度小于1像素时,卷积计算被抑制。如下图19所示,此操作成功地丢弃了场景中的大部分杂波,并可以对线状特征强烈的响应。这是对垂直和水平内核分别进行的,给出两个输出图像(图19b、c)。接下来,通过对水平滤波器输出的每一行和垂直滤波器输出的每个列的数值进行迭代,以构建一维局部最大值列表,这些最大值将作为特征。理想情况下,这些最大值出现在所有线的中心。
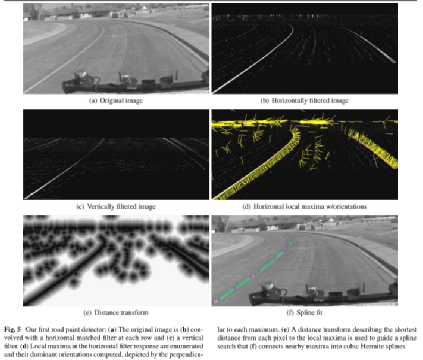
图19 车道线检测
(2)一种拓扑图表示为OpenStreetMap(OSM),它使用三个基元(即点(Nodes)、路(Ways)和关系(Relations))用拓扑图对环境进行建模。“点”表示地理点,“路”表示节点列表(折线),“关系”由任意数量的成员组成,这些成员可以是三种类型中的任何一种并具有指定的角色。其他道路属性(如行驶方向和车道数量)作为要素的属性给出。(3)一个非常详细的拓扑路线图,称为车道片段图(lanelet)。lanelet图内包括道路的几何和拓扑特征,如道路、车道和交叉口。其中使用原子互连的可驱动路段,称为车道片段,如图20所示。车道片段的几何形状由左侧和右侧定义绑定,每一个对应一个点列表(折线)。该特征隐含地定义了每个车道的宽度和形状及其行驶方向。车道片段的邻边由加权有向图构成。在加权有向图中,其中每个车道片段用边和长度表示,其中长度代表着向外标远的权重。其他要素描述了条件限制,如速度限制和交通规则(如交叉和合并权利)。
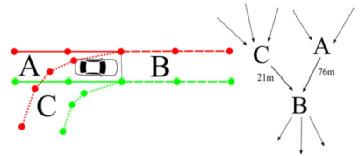
图20 lanelet地图
(4)高清地图(HD maps)是为无人驾驶汽车提供动力的新一代拓扑地图。高清地图的精度可达到厘米级,并包含丰富的信息,如车道位置、道路边界和道路曲率的信息。由于创建高清地图的成本很高,因此通过使用平台将高清地图作为服务提供。
1.3.2地图创建
创建道路地图的最简单方法是对航空影像中提取的道路形状进行手动注释。然而,大型城市道路网络所需的非常高成本的注释,这可能会使手动注释变得不可行。为此,提出了用于从航拍图像自动生成道路地图的方法。
1.3.2.1手动注释
(1)使用从航拍图像中提取的道路形状的手动注释,以便为自动驾驶汽车创建路线图。获得的局部道路形状是准确的,然而,由于图像分辨率和全球注册,位置全局地理信息并不那么准确。为此,他们的定位方法使用位置过滤处理道路模型中的错误地方。
(2)采用了无人驾驶车Bertha的车道片段地图的所有元素和属性的手动注释。虚拟顶视图图像被用作使用OSM格式和Java OSM编辑器手动注释车道片段图作为基础。
1.3.2.2智能生成
- 下一篇:利用内省学习和推理增强基于栅格的运动规划
- 上一篇:专利揭秘上汽“躺式”电池安全设计



编辑推荐




最新资讯
-
直播 | 2025亚马逊云科技汽车行业峰会!探
2025-04-17 10:01
-
从“智驾画饼”到“技术上桌”,智驾进入“
2025-04-17 10:00
-
数据定义场景 场景驱动开发!揭秘车辆能量
2025-04-17 08:17
-
L2 法规最新动向:从国内监管到欧盟 DCAS 0
2025-04-17 08:14
-
GRAS上海办公室喜迁新址
2025-04-17 08:13
