




 广告
广告





















































标准:GB/T 41797-2022 驾驶员注意力监测系统性能要求及试验方法

国家标准 GB/T 41797-2022 《驾驶员注意力监测系统性能要求及试验方法》已于 2022-10-14 发布,并将于 2023-05-01 正式实施。
标准将驾驶员注意力监测系统(Driver Attention Monitoring System,DAMS)定义为,实时监测驾驶员状态,并在确认其注意力分散时发出提示信息(光学、声学、触觉中至少2种)的系统,其能自动开启,也可由驾驶员手动开启和关闭。
标准规定了5种注意力分散行为及提示条件,DAMS应至少实现前3种(闭眼、头部姿态异常、接打电话)行为监测,如有后2种(打哈欠、抽烟)行为监测功能,也要满足相应要求。
1 范围
本文件规定了驾驶员注意力监测系统(以下简称“系统”)的一般要求、性能要求及试验方法。
本文件适用于安装有基于图像识别技术的驾驶员注意力监测系统的M类和N类车辆。其他具有
相同功能的系统可参照执行。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文 件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 10000 中国成年人人体尺寸
GB 10810.3 眼镜镜片及相关眼镜产品 透射比规范及测量方法
GB 34660 道路车辆 电磁兼容性要求和试验方法
GB/T 39263 道路车辆 先进驾驶辅助系统(ADAS) 术语及定义
3 术语和定义
GB/T 39263界定的以及下列术语和定义适用于本文件。
3.1 驾驶员注意力监测系统 driver attention monitoring system;DAMS
实时监测驾驶员状态并在确认其注意力分散时发出提示信息的系统。
3.2 注意力分散 distraction
驾驶员在驾驶车辆时因疲劳驾驶、受外界环境干扰或做出与驾驶无关的动作,导致其无法专注执行驾驶任务的状态。
3.3 头部姿态异常 abnormalheadpose
驾驶员抬头、低头或左右摆头时,头部前后倾斜角度和水平旋转角度超过正常范围的行为。
3.4 准确率 accuracyrate
某项行为的正检数与检出事件数(正检数+误检数)的比值。
注:误检数是被检出来为真实事件,但实际为虚假事件的数量。
3.5 检出率detection rate
某项行为的正检数与真实事件数(正检数+漏检数)的比值。
注:漏检数是未被检出为真实事件,但实际为真实事件的数量。
3.6 仿人机器人 humanoidrobot
具有人类的外形且通过程序控制模仿人类动作的机器人。
4 一般要求
4.1 功能要求
系统应具备实时监测驾驶员闭眼、头部姿态异常、接打手持电话的功能,可具备监测驾驶员打哈欠 或抽烟行为的功能,并在满足相应条件时发出提示信息。系统宜具备传输及存储提示信息内容的接口,系统记录数据仅用于监测驾驶员状态判定。
4.2 自检
系统应在上电后进行自检且至少具备以下自检功能:
———检查相关电气部件是否正常运行;
———检查相关传感元件是否正常运行。
4.3 系统的状态转换及信息提示要求
当系统无故障时,应满足如下要求:
a) 系统在车辆启动后自动开启并进入待机状态;
b) 具备驾驶员主动开启和关闭系统的功能,当驾驶员主动关闭系统后,系统发出光学提示信息并 持续显示;
c) 系统满足激活条件后由待机状态切换至激活状态,激活条件至少为下列方式之一:——直接激活:系统进入待机状态后自动进入激活状态;
-最低速度激活:车辆速度达到系统设计的最低激活车速时系统自动激活;
d) 当系统激活并检测到驾驶员注意力分散时,至少采用光学、声学、触觉中的2种方式向驾驶员 发出提示信息,该提示信息区别于其他提示信息;
e) 当激活条件不满足时,系统由激活状态退出至待机状态;
f) 当系统处于待机和关闭状态时,不向驾驶员发出提示信息。
4.4 故障指示
若系统发生故障,系统应具备故障指示功能并应至少以光学方式持续向驾驶员发出指示信息,该指
示信息应区别于系统其他提示信息并目视可见。
4.5 电磁兼容
系统的电磁兼容性应符合GB 34660的要求。
5 性能要求
5.1 驾驶员识别能力要求
按6.2进行试验,试验目标的行为满足表1中的提示信息条件时,系统正确识别全部行为并发出符 合4.3 d)要求的提示信息的人数不应小于试验人员总数的2/3,未被识别全部行为的试验人员的各类行为中应至少1次被系统识别出相应行为并发出提示信息。
若系统可在驾驶员打哈欠或抽烟时发出提示信息,按6.2进行试验,试验目标的行为满足表1中的 提示信息条件时,系统正确识别全部行为并发出符合4.3 d)要求的提示信息的人数不应小于试验人员 总数的2/3,未被识别全部行为的试验人员的各类行为中应至少1次被系统识别出相应行为并发出提示信息。
示例:闭眼行为3人各6次试验中,仅允许有1人出现无法被系统正确识别情况,且在该试验人员进行6次闭眼试验过程中需至少被系统正确识别1次。
表 1 系统监测行为及提示信息条件
序号
行为
内容
提示信息条件
1
闭眼
眼睛完全闭合
闭眼持续时间≥2 s
2
头部姿态异常
头部偏转角度左偏或右偏≥45°
头部姿态异常持续时间≥3 s
抬头或低头≥30°
3
接打手持电话
手持电话任意点与面部的距离<5 cm
接打手持电话持续时间≥3 s
4
打哈欠
张嘴高宽比(上下嘴唇内缘的最小竖直高度与
嘴角水平宽度的比值)>0.6
打哈欠持续时间≥3 s
5
抽烟
手持香烟与嘴唇最小距离不应大于2 cm
抽烟持续时间≥2 s
试验人员头部姿态方向与视线方向一致。
5.2 检出率及准确率要求
按6.3进行试验,试验目标行为满足表1中的提示信息条件时,系统应在1.5s内发出符合4.3 d)要求的提示信息,其检出率及准确率应大于或等于95%。
若系统可在驾驶员打哈欠或抽烟时发出提示信息,按6.3进行试验,试验目标行为满足表1中的提 示信息条件时,系统应在1.5s内发出符合4.3d)要求的提示信息,其检出率及准确率应大于或等于95%。
6 试验方法
6.1 试验条件
6.1.1 试验环境条件
试验环境条件应满足以下要求:
a) 光照强度:
— 白天应大于2000lx且小于100001x;
— 夜晚应大于0lx且小于15lx;
b) 外部光源在驾驶舱内无明显反光现象;
c) 温度范围为-20℃~+45 ℃。
6.1.2 试验道具条件
试验道具应满足以下要求:
— 手持电话宽度为70mm~90mm,长度为140mm~170mm,厚度为7mm~10mm且未装配手机壳,或同尺寸替代物;
— 香烟长度为84 mm~120 mm,直径为5mm~10mm,或具有香烟外形特征的替代物。
6.2 驾驶员识别能力试验
6.2.1 试验目标
试验目标为至少3名无面部、眼部缺陷,满足GB/T10000中18岁~60岁组身高、坐姿眼高、头部形态面长尺寸要求的成年人。
6.2.2 试验过程
在白天光照强度下,系统处于激活且功能正常时,试验目标于驾驶区域执行表1中的行为,每人每项行为执行6次,单次行为之间应至少间隔5 s。
6.3 检出率及准确率试验
6.3.1 试验目标
试验目标为满足附录A要求的仿人机器人。
6.3.2 光源
光源应能够以车辆第一排座位中心位置为圆心,按图1所示光源位置移动,其中α为7.5°,β为10°,光源入射角γ为30°~45°。
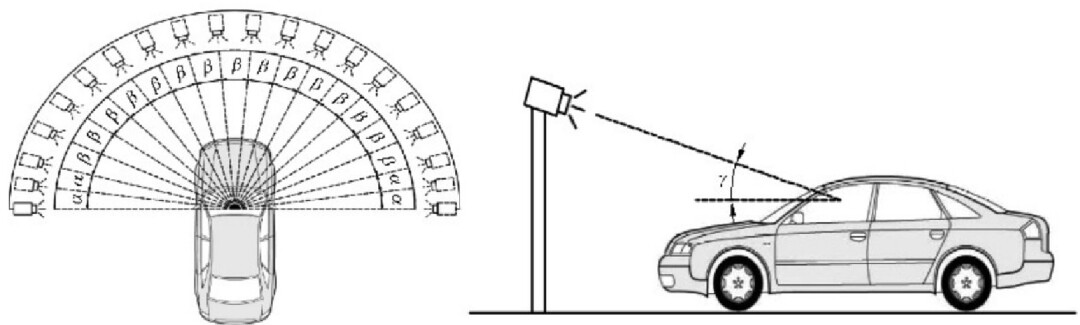
图 1 光源位置变化示意图
6.3.3 试验过程
分别在白天与夜晚条件下进行试验,系统处于激活且功能正常时,试验目标于驾驶区域执行表2中的行为,试验次数见表3,各单次行为间隔时间应大于5 s。
表 2 行为动作单次完整试验定义
序号
行为
单次完整试验定义
1
闭眼
试验目标目视前方保持正常驾驶姿势,然后闭眼,持续闭眼2s后睁开眼睛
2
打哈欠
试验目标目视前方保持正常驾驶姿势,然后打哈欠,持续张嘴3s后闭合嘴巴
表 2 行为动作单次完整试验定义(续)
序号
行为
单次完整试验定义
3
头部姿态异常
向左转头
试验目标目视前方保持正常驾驶姿势,头部在0°位置(头部方向与车辆行驶方向一致),然后向左转头45°~50°,持续3s后回到0°位置
向右转头
试验目标目视前方保持正常驾驶姿势,头部在0°位置(头部方向与车辆行驶方向一致),然后向右转头45°~50°,持续3s后回到0°位置
抬头
试验目标目视前方保持正常驾驶姿势,头部在0°位置(头部方向与车辆行驶方向一致),然后抬头30°~35°,持续3s后回到0°位置
低头
试验目标目视前方保持正常驾驶姿势,头部在0°位置(头部方向与车辆行驶方向一致),然后低头30°~35°,持续3s后回到0°位置
4
接打手持电话
试验目标保持正常驾驶姿势,接打手持电话时(手持电话不能被手部完全遮挡),手持电话靠近头部持续3s后放下继续正常驾驶
5
抽烟
试验目标保持正常驾驶姿势,手夹香烟靠近面部2cm以内,持续2s后将烟放下继续正常驾驶
表 3 试验次数
行为
光照条件
穿戴条件
裸眼
戴 墨 镜 °
戴眼镜
闭眼
白天试验次数b
20
20
20
夜晚试验次数′
20
0
20
打哈欠
白天试验次数
20
20
20
夜晚试验次数b
20
0
20
头部姿态异常
白天试验次数b
20
20
20
夜晚试验次数'
20
0
20
接打手持电话
白天试验次数6
20
0
0
夜晚试验次数6
20
0
0
抽烟
白天试验次数6
20
0
0
夜晚试验次数6
20
0
0
墨镜应满足GB10810.3的要求,且为非红外光阻断。
b根据6.3.2,各光源位置应执行试验一次,共计20次。
附 录 A
(规范性)
仿人机器人
A.1 概述
本附录规定了用于系统性能试验的仿人机器人的技术要求。
A.2 要求
A.2.1 通用要求
A.2.1.1 仿人机器人尺寸
仿人机器人尺寸应符合GB/T10000中18岁~60岁组的成年人中对于人体尺寸基础数值的规定,表A.1给出了各个部位的尺寸取值范围,对应位置如图A.1~图A.4所示。
表A . 1 各个部位尺寸
单位为毫米
部位
取值范围
头宽LI
141~168
头长L2
168~200
头形态面长L3
104~135
头全高L4:
199~249
头冠状弧L5;
330~392
头矢状弧L6
314~384
头 围 L₇
525~597
手长L8
164~202
手宽L9
73~91
食指长L10
60~79
食指指关节宽L11
14~19
胸厚L12
176~261
胸围L13
762~1018
胸宽L14
242~331
肩宽L15
330~415
最大肩宽L16
383~486
坐姿两肘宽L17
353~518
坐高L18
836~979
坐姿颈椎点高19
599~719
坐姿眼高L20
729~868
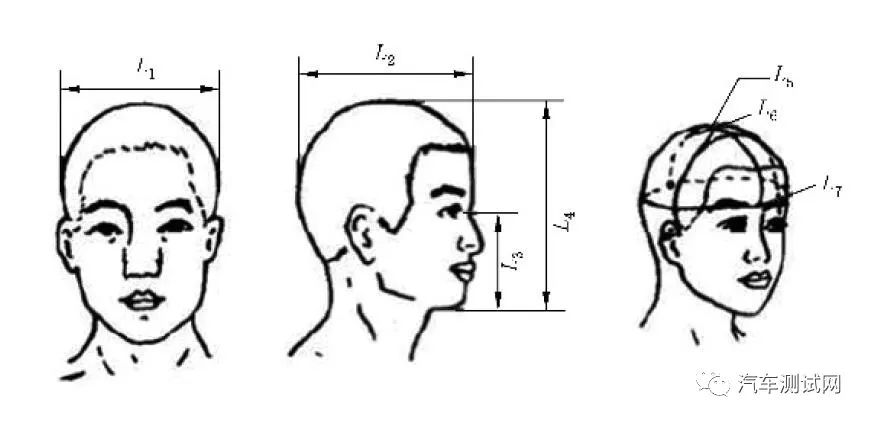
图A . 1 仿人机器人头部尺寸示意图
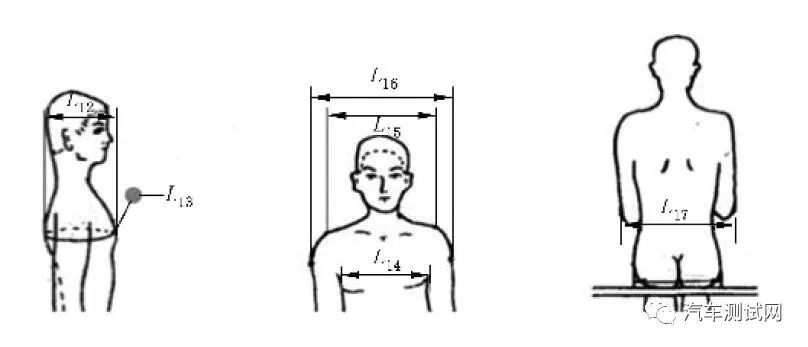
图A .2 仿人机器人躯干水平尺寸示意图
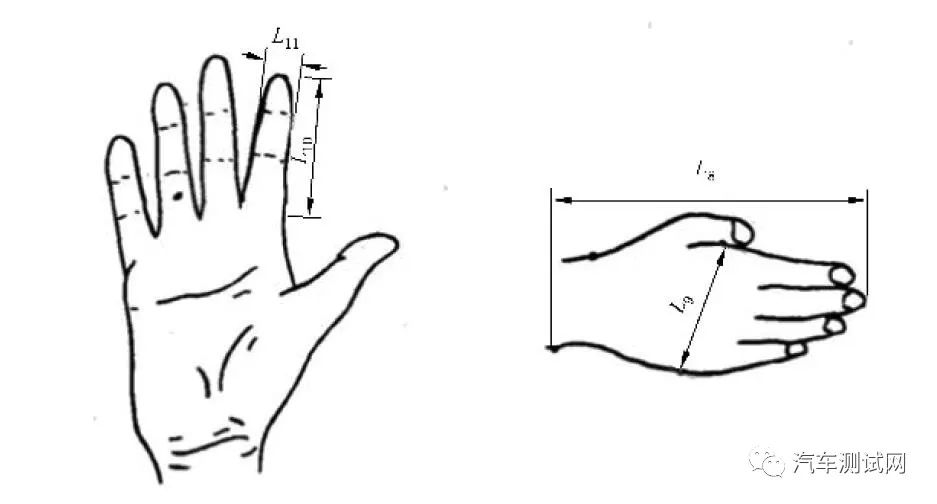
图A .3 仿人机器人手部尺寸示意图
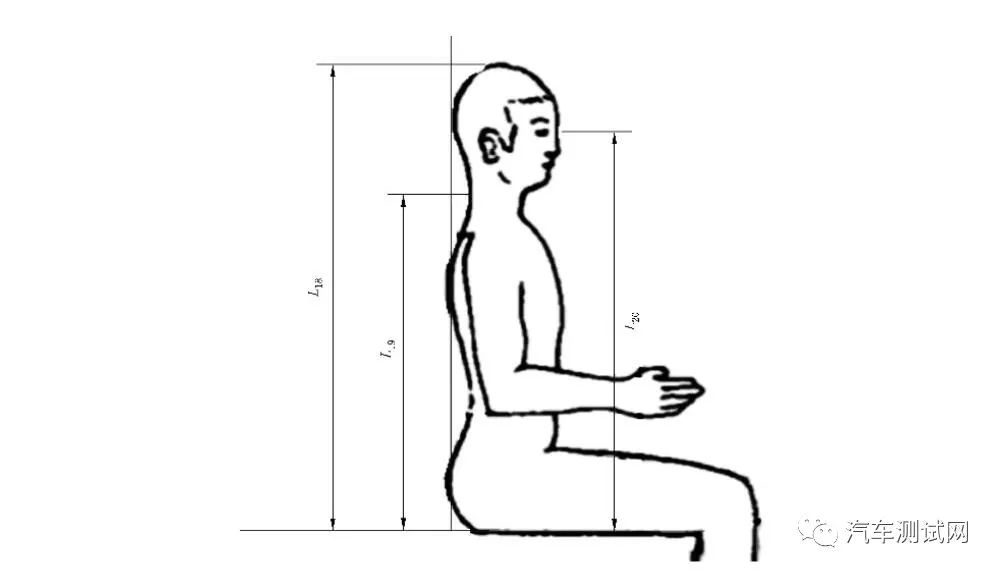
图A .4 仿人机器人坐姿人体尺寸示意图
A.2.1.2 眼睛
仿人机器人的眼睛水平宽度范围应为30 .0 mm~33 .0 mm,最大竖直高度范围应为5 .0 mm~11.7 mm,眼睛尺寸如图A.5所示。
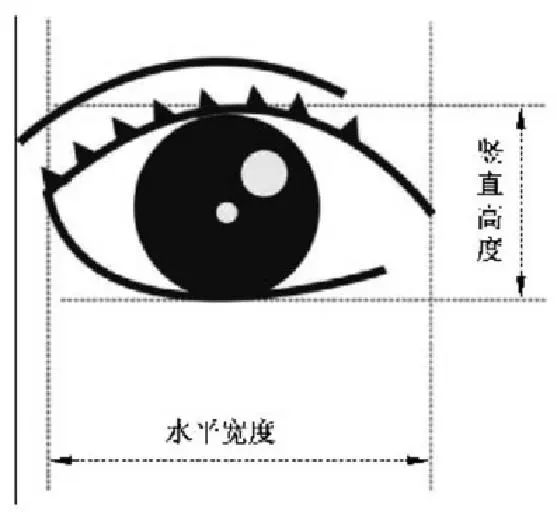
图A .5 眼睛尺寸示意图
A.2.1.3 嘴巴
仿人机器人的嘴巴最大竖直高度范围应为28.9 mm~33.9 mm,最大水平宽度范围应为46.9 mm~56.9 mm。
A.2.1.4 头部运动范围
仿人机器人头部转动范围应为-90°~90°,抬头极限应为45°,低头极限应为45°。
A.2.1.5 动作
仿人机器人应具备执行表A.2所示动作的能力。
表A . 2 仿人机器人的动作
项 目
部位
功能
头部动作
眼睑
眨眼、闭眼、睁眼
嘴巴
张合
头部
左右转动、抬头低头
手臂动作
大臂
抬升、下降、旋转
小臂
抬升、下降、旋转
手腕
旋转
手部动作
6自由度和12个运动关节
各关节可独立动作,实现抓取手机(手机不被
手部遮挡)、手持手机、扶握方向盘、夹持香烟
组合动作
头部相关部位之间的组合,
头部与手部之间的组合
闭眼+打哈欠联动,打哈欠+抬头联动,
转头+接打手持电话等组合
A.2.1.6 精度
仿人机器人精度应满足如下要求:
———头部各关节动作精度:±0.1°;
———手臂各关节动作精度:±0.01°;
— 手指定位精度:空间位置偏差小于0.25 mm;
—— 仿人机器人动作精度:空间位置偏差不超过5 mm。
A.2.1.7 数据记录
仿人机器人应记录并存储以下数据:
— — 动作类型;
— 动作开始及结束时间。
A.2.2 特征要求
A.2.2.1 特征点
同一驾驶员注意力监测系统检测时,仿人机器人应能检测到至少68个特征点数据,与真人检测到特征点数据相符。
A.2.2.2 皮肤材质
仿人机器人肤色的色纯度范围应为27.40%~32.70%,皮肤光线反射率分布范围应为19.74%~26.26%。
A.2.3 安装要求
A.2.3.1 头部
仿人机器人头部安装平面应为水平,偏差角度在2.5°以内。
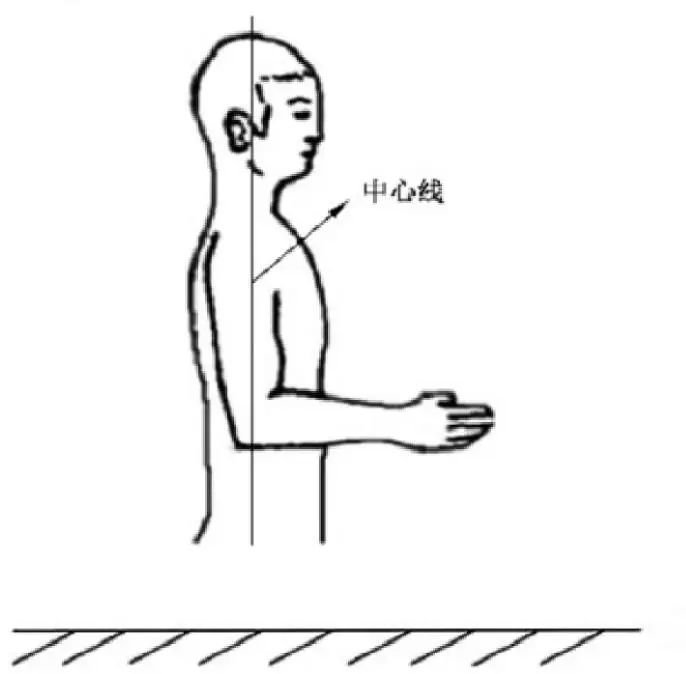
A.2.3.2 手 臂
仿人机器人的上臂应贴近躯干且垂直于中心线,如图A.6所示。
水平面
图A . 6 仿人机器人手臂示意图
A.2.3.3 手
仿人机器人的手掌应与方向盘轮缘水平中心线处和轮缘外侧相接触,拇指应放在方向盘轮缘上,如图A . 7所示。
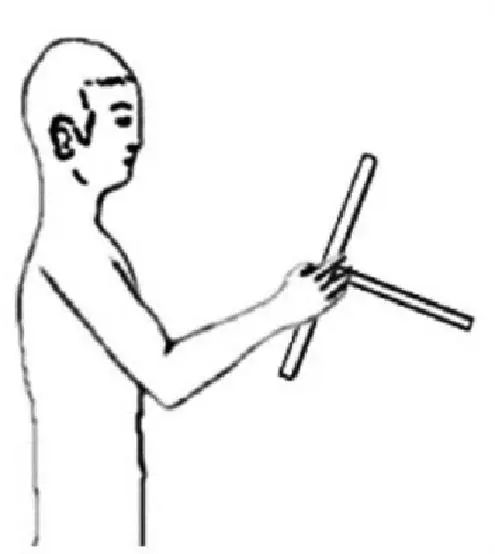
图A . 7 仿人机器人手部放置示意图
A.2.3.4 躯干
仿人机器人的上躯干应与座椅靠背(标准状态)接触,仿人机器人的对称面应平行于车辆纵向中心面且通过方向盘轮缘中心,如图A.8所示。
图A . 8 仿人机器人躯干示意图
A.2.3.5 仿人机器人的运动
在试验过程中,车上安装的测量仪器不应影响仿人机器人的运动。







最新资讯
-
奇石乐推出用于DAQ数据采集系统的KiStudio
2025-04-28 17:51
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
