




 广告
广告





















































四轮转向汽车操纵稳定性建模与仿真

2.1 二自由度模型
将车辆的横向控制模型简化为线性二自由度汽车模型,仅考虑车辆的横向位移和横摆角速度,如图3所示。其中坐标系的原点C与车辆的重心重合,车辆横向加速度为Vy,纵向速度为Vego,横摆角速度为ωr。
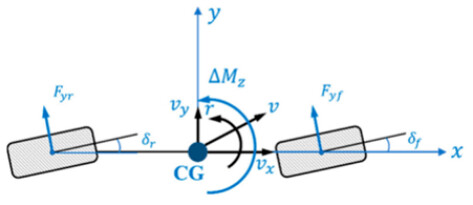
图3 四轮转向车辆二自由度模型
由车辆运动学知识得,二自由度模型的方程为:
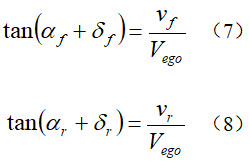
设车辆前后轴两轮胎的侧向合力为Fyf和Fyr,忽略回正力矩,则:
在二自由度模型中,前轮的横向速度为:
后轮的横向速度为:

车辆前后轴都是转向轴,设前后轮的转向角为δf和δr,则:
由于轮胎的侧偏角很小,则前后轮的侧偏角可近似为:
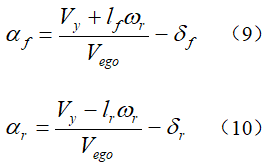
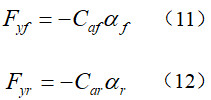
假设轮胎工作在线性区,则前后轮的侧向力为:
与前轮转向车辆相比,4WS系统的侧向力和横摆扭矩均多出了由后轮转角引起的附加增量,这也是4WS系统可以改善车辆操纵稳定性的根本原因所在。根据(3)-(12)可得:
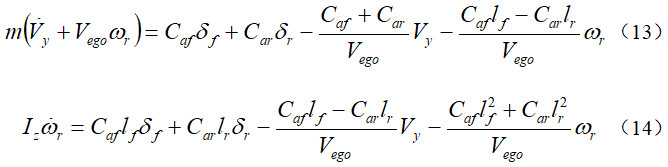
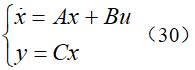
对式(13)和(14)进行变换可得4WS的状态空间模型:

其中,Iz为车辆的转动惯量(kg.m2),Caf和Car分别为车辆前后轮的侧偏刚度(N/rad),δf和δr分别为前后轮转角(rad)。
2.2 稳态转向特性
4WS的后轮转向角输入通常由两部分信息决定:一部分是正比于前轮转向角的输入,另一部分是与侧向加速度有关的输入,其中侧向加速度由纵向车速与横摆角速度确定。假定四轮转向系统的后轮转向角控制输入为:
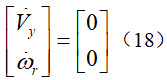
其中,Gδ为前后轮转向角之比,Ga为车辆侧向运动状态的反馈增益。则二自由度模型可简化为

当Gδ=Ga=0时,模型(17)等效于前轮转向车辆的二自由度模型。当车辆稳态行驶时,车辆的稳定行驶状态即为车辆二自由度模型的平衡点即
根据(17)和(18)可得平衡点为
车辆稳态转向行驶时,四轮转向系统的控制目标是使稳态质心侧偏角为0,即横向运动速度的稳态值为0,可得

则前后轮转向角之比为
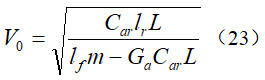
因此,四轮转向系统(16)按照(21)来设定前后轮转向角之比时,就可以保证车辆稳态行驶时的横向运动速度为0,而该前后轮转向角比随车辆行驶速度变化而变化。根据(21)可得临界速度满足关系式
则可得临界速度为
在临界车速V0附近时,前后轮转向角之比Gδ约为0,此时四轮转向系统(16)等价于前轮转向系统。如下图所示,当车速小于V0即低速时,前后轮转向角之比Gδ为负值,前后轮转动方向相反,可减小转弯半径,提高车辆的通过性与操纵灵活性;当车速大于V0即高速时,前后轮转向角之比Gδ为正值,前后轮转动方向相同,车辆侧向加速度响应时间缩短,横摆角速度响应也大幅减小。
图4 前后轮转向角之比随车速的变化曲线图
四轮转向系统(16)按照(21)来设定前后轮转向角之比时,根据(19)可得车辆的稳态横摆角速度响应为
其中,稳定性因数为
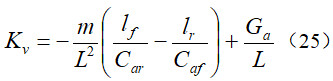
当车速大于临界速度V0时,由于前后轮转向角之比Gδ为正值,因此,根据(24)可得四轮转向车辆的横摆角速度比两轮转向车辆的横摆角速度大幅减小。此外,根据稳定性因数(25)可得,前后轮转向角之比Gδ并不改变车辆的转向特性,而车辆侧向运动状态反馈增益Ga>0的引入增加了车辆不足转向的趋势,随着车速的增加,将更好地抑制稳态横摆角速度增益,这说明了正比例系数Ga的引入对4WS车辆的操纵稳定性起着非常重要的作用。
2.3 楔形移动特性
上节中分析了4WS车辆的稳态转向特性,四轮转向系统(16)的控制目标是使稳态质心侧偏角为0,即横向运动速度的稳态值为0。当4WS车辆做楔形移动时,四轮转向系统(16)的控制目标是使稳态横摆角速度为0,根据(19)可得前后轮转向角之比Gδ为
根据(19)可得,比例系数Ga对横向运动速度的稳态值没有影响,则可取Ga=0,则此时的四轮转向系统(16)为
此时,前后轮转角相等,4WS车辆做楔形移动,车辆的稳态侧偏角为
2.4 前轮转向和四轮转向的区别
当四轮转向系统(16)按照(21)来设定前后轮转向角之比Gδ且假设比例系数Ga=0.001时,根据车辆的二自由度模型(15)对4WS车辆的操纵性能进行仿真分析,并与前轮转向车辆的操纵稳定性进行比较。本节给出两种典型工况下的仿真结果,通过与前轮转向车辆的仿真结果对比来加以解释说明。本次仿真所采用的车辆参数如下表所示。
表1 仿真所采用的车辆参数
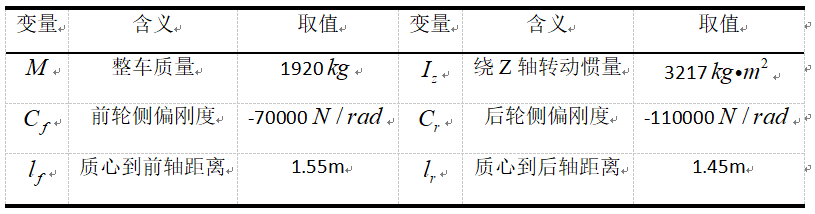
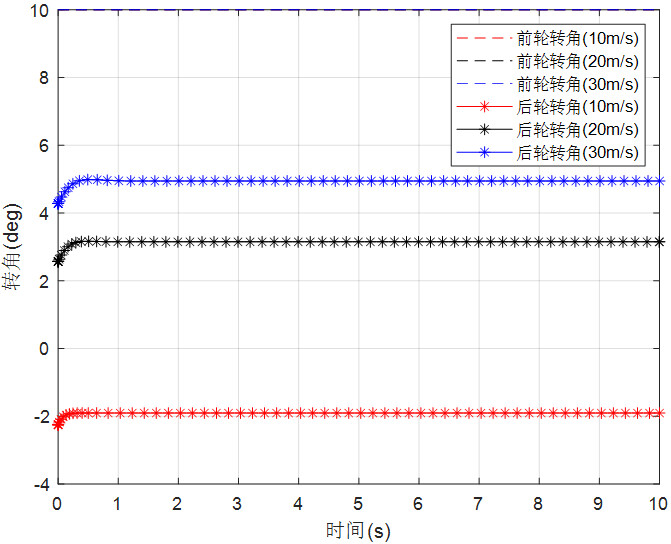
根据式(23)计算得到对应的临界速度在13.5m/s左右。1.阶跃转角输入工况车速分别取10m/s、20m/s、30m/s三种工况,两轮转向车辆和四轮转向车辆的前轮转角输入都是10°,4WS车辆的前后轮转角输入如图5所示。由图可见,当车速小于临界速度时,前后轮转动方向相反,可减小转弯半径,提高车辆的通过性与操纵灵活性;当车速大于临界车速时,前后轮转动方向相同,且速度越快后轮转角越大,有助于改善车辆的横摆角速度响应。
图5 前后轮转角输入
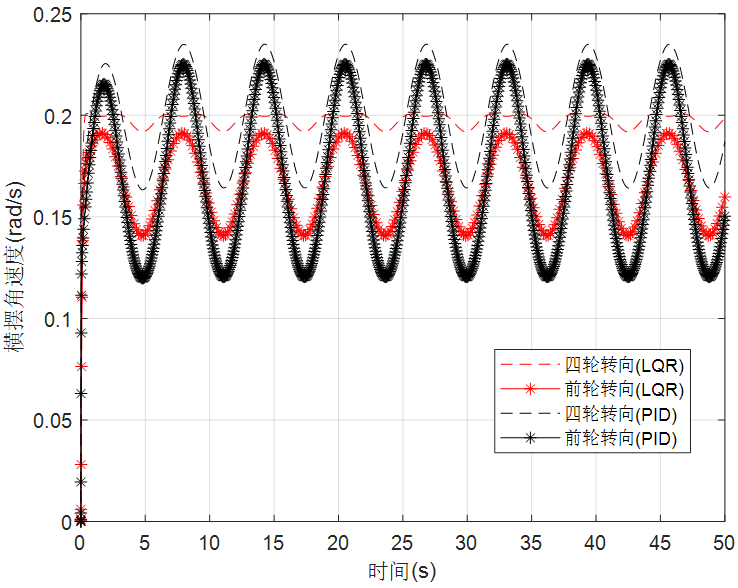
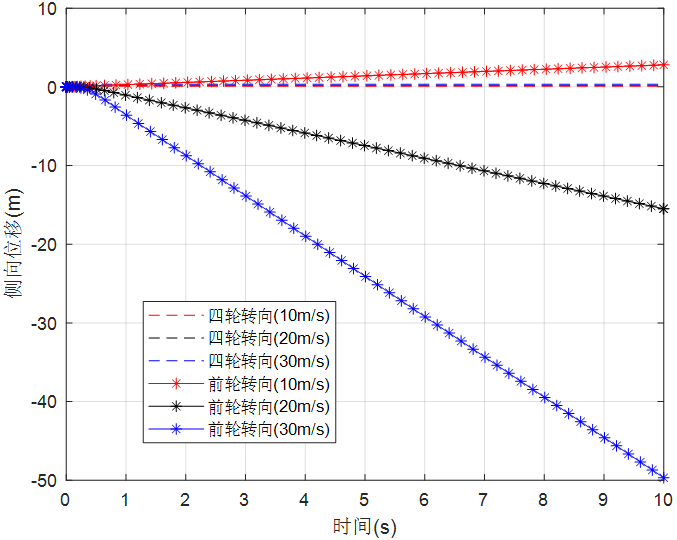
前轮转向车辆与四轮转向车辆的操纵动力学响应对比结果包括侧向速度与侧向位移响应、横摆角速度响应依次如下图所示。由图6可见,四轮转向车辆稳态运动时没有侧偏现象,且瞬态过程的侧偏角也小于前轮转向车辆,速度越快瞬态控制效果越明显,同时,对于四轮转向车辆,车速越快侧向速度越大,但最终都将趋近于0。由图7可见,两轮转向车辆存在明显的侧偏现象,且车速越快侧偏越严重,而四轮转向车辆的侧偏角明显小于两轮转向车辆。由图8可见,两轮转向车辆的横摆角速度随着车速的增大而增大,四轮转向车辆的横摆角速度随着车速的增加而减小,这是因为高速时,前后轮为同位转向,横摆角速度减小,而在低速时,四轮转向车辆采用逆位转向策略,减小了转弯半径但是略微增大了横摆角速度,不过与两轮转向车辆相比还是具有较大的优势,尤其是高速时的优势更明显。由图9可见,四轮转向系统增加了车辆不足转向的趋势,随着车速的增加,将更好地抑制稳态横摆角速度增益,这也说明了正比例系数Ga的引入对4WS车辆的操纵稳定性起着非常重要的作用。

图6 侧向速度响应
图7 侧向位移响应



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
