




 广告
广告





















































面向智能汽车测试的弱势群体服饰色彩研究

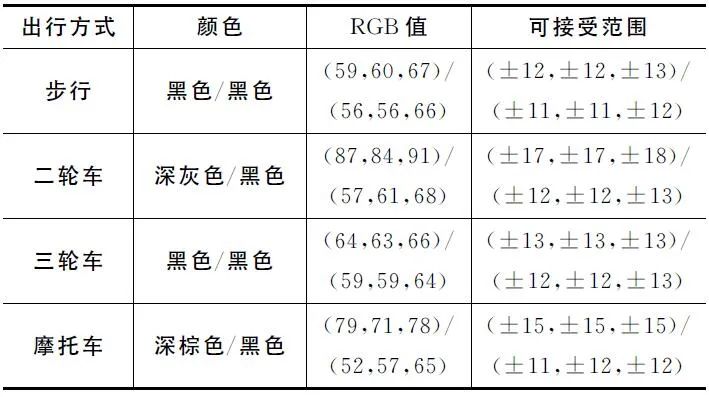
注:“/”前后分别对应上、下衣。
4.1.1 测试车辆
测试车辆选用TeslaModel3,长、宽、高分别为4694、1850、1443mm。该型号车辆配有前置、侧方和车尾8个视觉摄像头,视野范围达360°,是其自动辅助驾驶系统Autopilot中最重要的传感器,能够有效检测颜色变化带来的影响。被测车辆安装高精度惯导设备,用于采集测试车辆实时位置、移动速度以及加速度等信息。
4.1.2 测试目标物
目标物分为行人目标物与二轮车目标物,如图6所示,目标物着装衣服颜色为本文第3节结果推荐的黑色/黑色组合,外形基于中国成年男性平均身高设定为172cm。目标物被安置于高分子工程塑料制成的移动平台之上,移动平台由放置于路侧的牵引系统驱动。行人目标物具有4个主动自由度,2个被动自由度,行动时具有完全自然的类人行走步态。二轮车目标物选用26寸山地车,行动时具有可调节速度的完全脚蹬动作。目标物实时运动数据和车辆的实时运动数据通过无线网络进行交换,数据采集频率为100Hz。

图6 行人测试目标物和自行车骑行者测试目标物
4.2 试验场景4.2.1场景分类
目前,中国对于自动紧急制动(AEB)实车测试的相关标准主要包括2类。一类是由中国汽车技术研究中心发布的新车评价规程(China-NewCarAssessmentProgramme,C-NCAP)。一类是由交通运输部发布的JT1242/T行人AEB测试方法。本研究主要依据C-CNAP进行。据C-NCAP(2021)规定,面向VRU的AEB测试典型危险场景分为行人目标物场景(AEBVRU_Ped)与二轮车目标物场景(AEBVRU_TW)。图7为行人目标物测试场景,横向场景中车辆驶向穿越街道的行人,未制动情况下在预定碰撞位置相撞。D为目标物从出发点行走至预定碰撞处所需距离,远端场景下该距离为6m,近端场景下为4m。F为目标物加速距离,目标物通过该距离实现从起步到匀速的过渡,远端场景下为1.5m,近端场景下为1m。“M”和“L”点分别对应测试车辆前端结构25%与50%碰撞位置,C为二者碰撞位置偏移量。纵向场景下,G为行人目标物加速距离,长度为1m,S为行人目标物匀速距离,长度为10m。“N”点为测试车辆前端结构50%碰撞位置。远端场景下目标物匀速行进速度为6.5km·h-1,近端与纵向场景下匀速行进速度为5km·h-1。每组场景测试车辆分别以20、30、40、50、60km·h-1的速度进行测试。
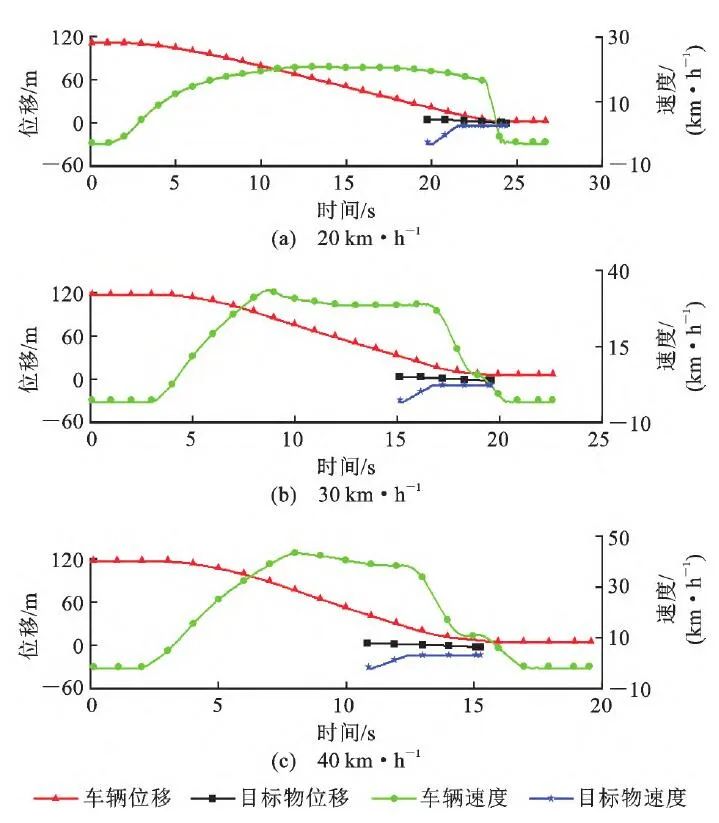
图7 行人目标物测试场景示意
图8为自行车目标物测试场景。在未采取制动措施的情况下,测试车辆与近端横穿的自行车发生碰撞,碰撞位置E在车辆前端结构50%处。自行车加速距离C后速度达到15km·h-1,随后匀速行进,匀速行驶距离D为17m。纵向场景下测试车辆与目标物同方向前行,自行车加速距离Q为3.5m,匀速行驶距离S为28m,匀速时速度为15km·h-1。碰撞位置在50%处,对应图8中U点。
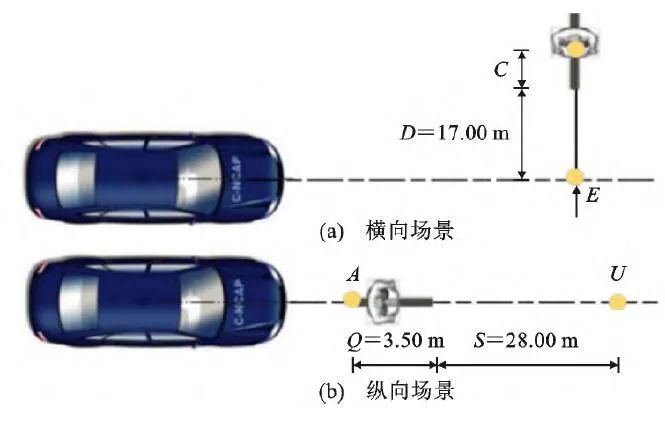
图8 自行车目标物测试场景示意
4.2.2 场景搭建
实车测试在200m×50m的封闭地上开展。试验路面干燥,表面无可见水分且平整、坚实。天气干燥,无降水、降雪等情况,能见度良好。测试在自然光条件下进行,整个试验区域内照明情况一致,无明显阴影区域,试验不在朝向或背离阳光直射的方向上进行。横向测试场景中,测试车辆与目标物运动路径相互垂直,其交点设为事故预定碰撞点,也是记录位置信息时平面直角坐标系的原点。设测试车辆与目标物初始位置为两轴的正半轴,前进方向为两轴的负方向。纵向测试场景中测试车辆与目标物同向前行,目标物初始位置为坐标轴原点,行进方向为负方向。每组测试于车辆启动前至停车稳定后记录测试车辆的速度与位置数据。目标物在车辆行驶一定距离后触发,并开始记录信息,按场景规定加速、匀速运动相应路程,若未受碰撞则保持当前速度继续匀速运动1m,终止信息记录,随后减速至停止,该过程与启动时加速运动相反。受场地因素制约,测试中横向场景车速最大为40km·h-1,纵向场景最大车速为30km·h-1,同一场景下每组车速测试一次,若车辆AEB系统有效识别前方目标物并控制车辆制动避免碰撞即为成功。
4.3试验结果
测试车辆依次按C-NCAP中规定的7种场景进行AEB系统测试,检测身着代表颜色上下衣的目标物能否被识别并使车辆及时制动,记录车辆与目标物速度和位移信息。图9为碰撞位置为25%的行人横向远端场景。如图10所示,CPFA-25共进行3组测试,测试车速依次为20、30、40km·h-1。3组测试均成功制动但后2组车速下降相对平缓,表明测试车辆较早发现目标物并提前开始减速。

图9 CPFA-25实车测试场景
图11为碰撞位置为50%的行人横向远端场景。如图12所示,CPFA-50共进行3组测试,车速依次为20、30、40km·h-1均成功制动。图13为碰撞位置为25%的行人横向近端场景。如图14所示,CPNA-25共进行3组测试,测试车速依次20、30、40km·h-1。3组测试均成功制动,对比可见测试车速为20km·h-1时车辆智能驾驶系统发现目标物时间较晚,需采取紧急制动。图15为碰撞位置为75%的行人横向近端场景。如图16所示,CPNA-75共进行3组测试,测试车速依次20、30、40km·h-1。3组测试均成功制动,随着测试车速增加,车辆识别目标物的时间也逐渐提前,从而更早地进行制动。图17为碰撞位置为50%的行人纵向场景。如图18所示,CPLA-50共进行2组测试,测试车速依次20km·h-1与30km·h-1。2组测试均成功制动,目标物处于纵向场景时,行进方向上同向不如交向便于传感器多角度探测,动作幅度上背影不如侧面迈步便于感知,因此给系统识别和制动造成了一定影响。
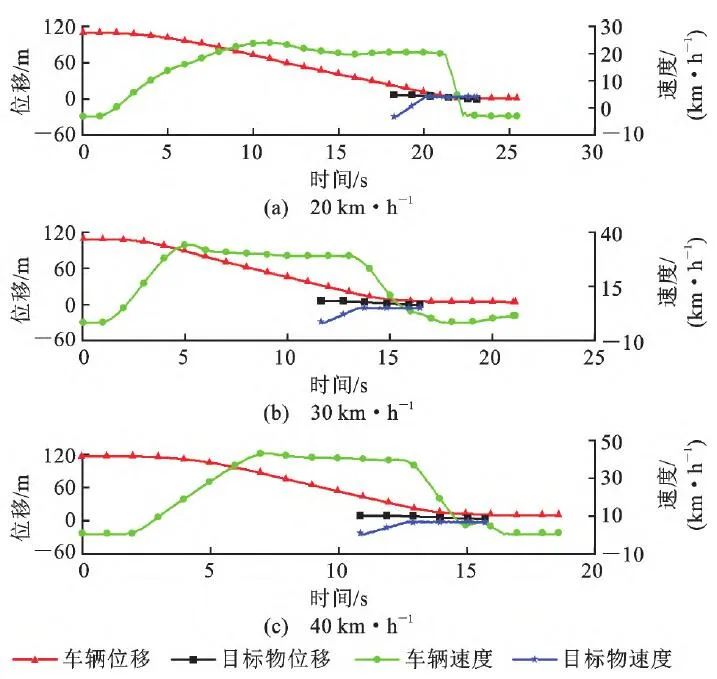
图10 CPFA-25场景下测试车辆与目标物速度位移曲线

图11 CPFA-50实车测试场景
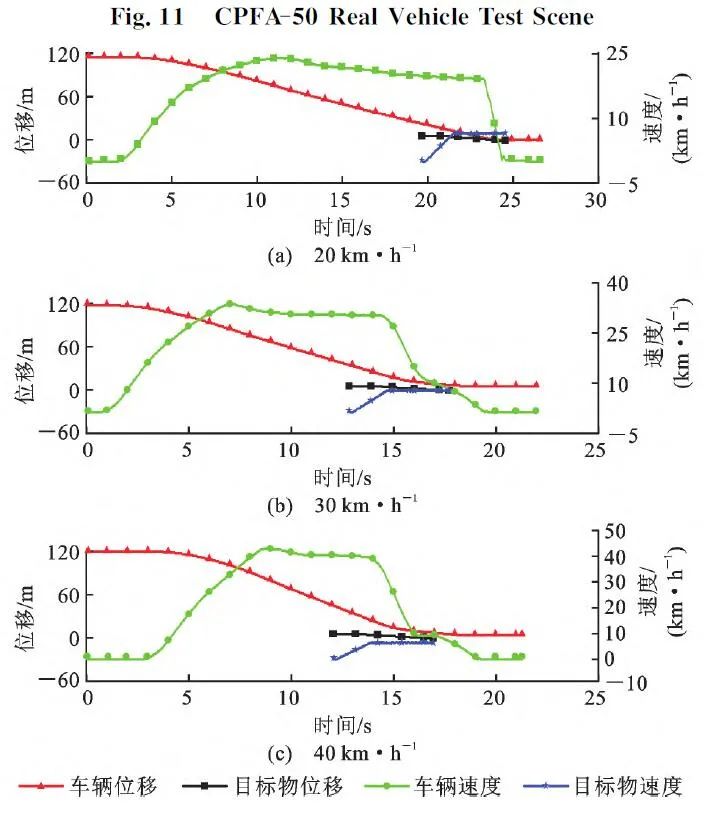
图12 CPFA-50场景下测试车辆与目标物速度位移曲线

图13 CPNA-25实车测试场景








最新资讯
-
漫说信息智能 · 电动车防晕车大作战
2025-04-27 16:28
-
R171.01对DCAS的要求⑨
2025-04-27 15:29
-
智驾标准法规体系大全
2025-04-27 15:28
-
国内最大汽车创作者大会开幕,懂车帝投入5
2025-04-27 13:18
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
