




 广告
广告





















































面向智能汽车测试的弱势群体服饰色彩研究
2023-02-03 11:43:01· 来源:汽车测试网

图14 CPNA-25场景下测试车辆与目标物速度位移曲线

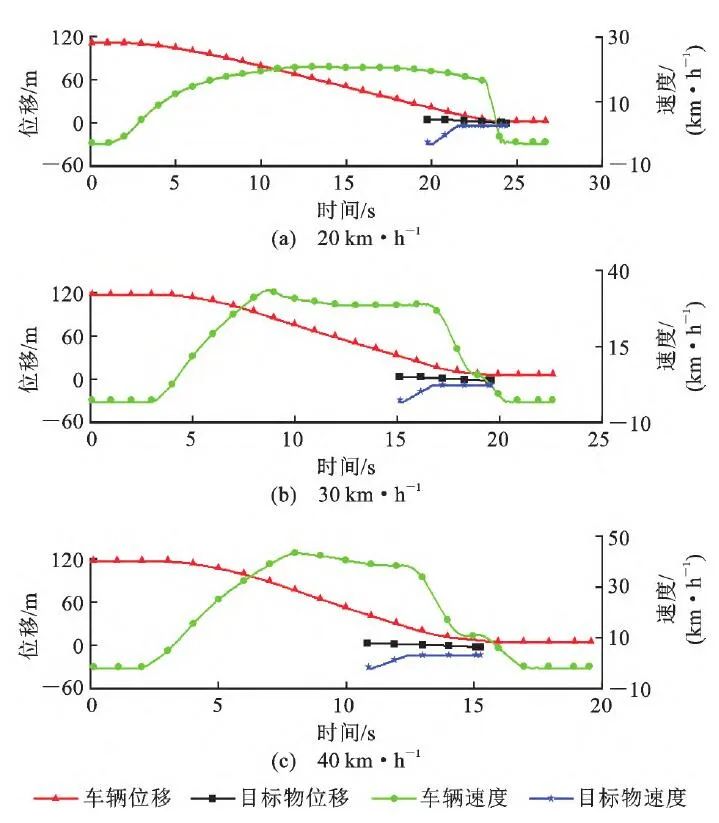


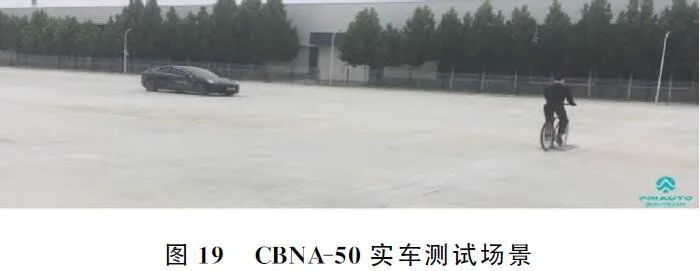
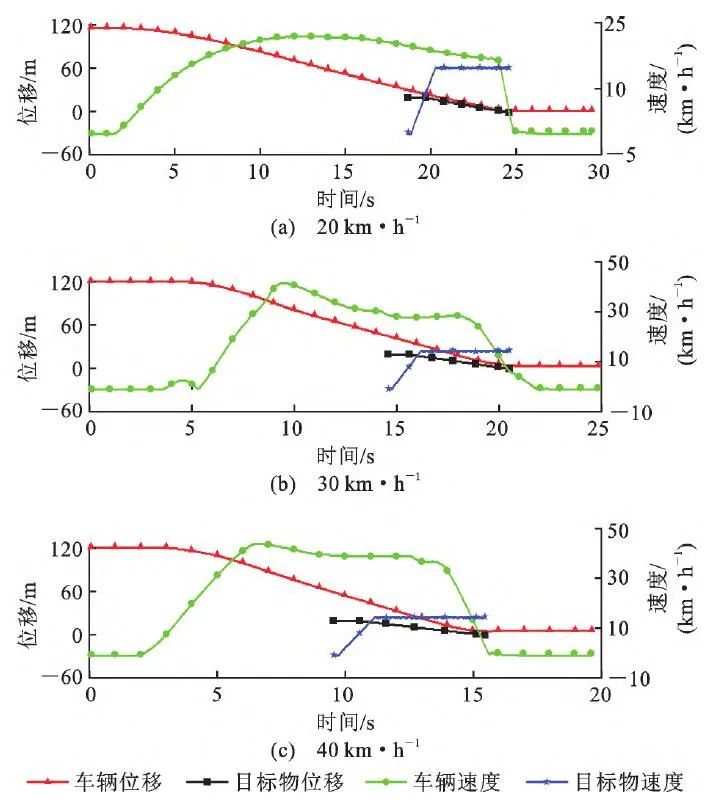
图15 CPNA-75实车测试场景
图19为碰撞位置为50%的二轮车目标物横向近端场景。如图20所示,CPNA-50共进行3组测试,测试车速依次20、30、40km·h-1。3组测试均成功制动,自行车移动速度比步行快,行进时间更短,使得车辆识别和制动的时间缩短。
图16 CPNA-75场景下测试车辆与目标物速度位移曲线
图17 CPLA-50实车测试场景
图18 CPLA-50场景下测试车辆与目标物速度位移曲线
图21为碰撞位置为50%的二轮车目标物纵向场景。如图22所示,CBLA-50共进行2组测试,测试车速分别为20km·h-1与30km·h-1。2组测试均成功制动,移动速度和场景方向上的特点为车辆识别目标物带来困难,致使车辆速度曲线波动。表10为每组测试中关键时间节点与运动过程特殊时刻测试车辆位置信息。由表10数据可见,尽管在各组测试中车辆最终均成功制动,但开始制动时间与停车后距预定碰撞点距离存在一定差异。全部测试中各场景下车速20km·h-1时情况最危险,车辆采取制动时距碰撞点均在5m左右,最终停车时据碰撞点距离仅在1m左右。当车速升至30km·h-1与40km·h-1时,车辆能够更早识别到前方目标物,采取制动时间提前,停车后至碰撞点距离也更为安全。表明智能驾驶系统的决策控制算法在车辆低速行驶时默认处于安全环境,导致传感器的探测距离与响应效率均有所下降,发现目标时车辆与目标物距离较为接近,需要采取紧急制动。







最新资讯
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
-
一文带你了解滤波器
2025-04-28 08:35
