




 广告
广告





















































【成功案例】自动泊车算法开发的数字化实践

摘要:在自动驾驶赛道上竞速向前的科技企业,如何用成本更低、效率更优、时间更快的方式,测试和迭代自动驾驶算法和系统?在2022年的非常时期,上海即使经历了近3个月的特殊管理,映驰科技依然找到了强大的数字化开发方法,通过更灵活、更便捷的仿真测试验证平台,降低了对实验车辆、道路测试的强依赖,使得行泊一体量产解决方案快步向前。
本文以映驰科技的行泊一体自动驾驶算法数字化仿真平台搭建为案例,阐述如何通过西门子Simcenter Prescan仿真平台与企业自动驾驶开发与测试验证业务的深度融合,实现算法的高效开发、自动化验证,降低人力成本、缩短开发周期,提供了企业数字化的最佳实践。
“感谢西门子做出这么好的仿真工具,
有力的支持了我们的产品开发迭代。”
—— 映驰科技CTO 段勃勃博士
01背景和技术需求
映驰科技为用户提供“高性价比”与“高性能体验”灵活可选的行泊一体量产算法解决方案,其中间平台软件在大规模量产复制和复杂系统上,更是有着举足轻重的价值。映驰科技通过多个自动驾驶项目的平台软件的量产项目,积累的方法论、工具链、软件模块,是软硬解耦的坚实基础,也是自动驾驶产品系统的开发加速器。
为了更好的服务不同车厂和Tier1客户,映驰科技对仿真工具链提出了三点技术要求:
-
加速泊车方案的开发交付;
-
充分验证多类型动静态环境场景下的自动泊车算法表现;
-
仿真工具必须通过功能安全ISO 26262 TCL3认证。
1.1加速泊车方案的开发交付
本方案的应用场景主要是支持泊车功能的开发与交付量产项目。
为了更好的服务于客户需求,映驰科技需要高效的开发可靠的泊车系统;并对所开发系统做充分的测试验证,保证其稳定性与强健性。
1.2充分验证多类型动静态环境
场景下的自动泊车算法表现
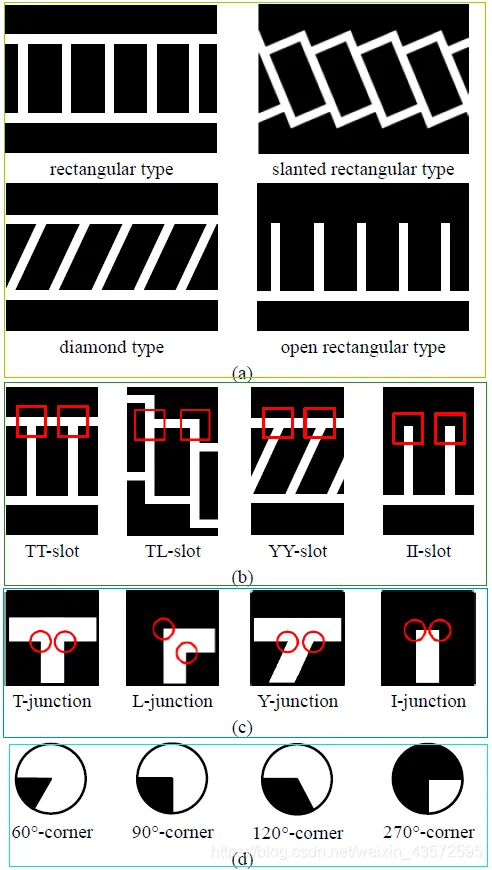
下图展示了多种典型停车位形态,实车测试收集如此种类繁杂的停车位成本极高。如再引入不同的天气、光照状态、停车位占用、停车场行人和特殊目标障碍物等因素…待测场景数量将呈指数级增长,难以单纯依赖实车进行充分、全面的测试验证。
1.3功能安全ISO 26262 TCL3认证
自动驾驶仿真软件工具在很大程度上可以提供自动化的测试服务,因此更需要关注其在规定的安全生命周期中需要执行的任务的可靠性。
ISO 26262 标准第 8 部分第 11 条包含工具评估和鉴定方法,包括工具评估、确定工具置信度、工具认证等几个方面。只有选择足够可靠的仿真工具,才能得出可信的测试结论。
02技术挑战
映驰科技针对以上的技术需求,在选择评估专业的仿真工具前,主要使用试验车场地测试的方式,遇到了较多难题:
1. 可验证场景数量和类型具有局限性
在实车测试中,无论是静态停车场的丰富度,或是动态干扰物的丰富度都有较大的局限性。对静态停车场而言,实车测试很难覆盖到不同材质、不同斜向、不同颜色、不同磨损程度的停车场。对于动态干扰物而言,构建场景中机动车和行人干扰物的行为动作不仅耗时耗力,且不能穷举。同时,对于不同的天气因素,如降雨、降雪等更是可遇不可求。
2. 实车验证泊车算法的时间成本较高
在算法迭代过程中,使用实车进行相关算法验证,不仅需要耗费时间将算法部署至实车控制器,同时要针对性找寻测试场景。
3. 该项目内部暂共享有限台测试车,实际可支配时间受限,需要降低实车测试依赖
在同一项目中,公司持有的测试车数量有限。由于多个团队共享测试车资源,为了避免时间统筹的冲突,引入仿真开发与测试验证平台有着较高的必要性。
4. 泊车算法开发前期,算法健壮性不足,直接实车测试具备一定的安全隐患等
在算法开发前期,需要较多的验证与迭代工作。此时将实车直接投入测试验证,对测试车辆与周围环境都有较大的安全隐患。
03解决方案
针对以上技术挑战,经过充分技术评估,映驰科技发现西门子Simcenter Prescan仿真软件平台,可以通过数字化仿真手段,优化算法与系统的开发与测试验证业务流程,减少对物理测试的车辆、人员、场地、时间依赖,最大程度上实现缩短开发周期、降低开发成本、提高验证效率。Simcenter Prescan的ISO26262 TCL3 软件功能安全等级认证,也加强了映驰科技的信心。
Simcenter Prescan专注于自动驾驶系统的仿真。其不仅可以提供行车场景的仿真,同时更是自带一些停车仿真场景的系统模型,如地下三层停车场、停车场地锁、停车场路灯、大小型垃圾桶等。同样,由于Simcenter Prescan具备自动化测试API接口,可帮助映驰科技在该项目中实现快速的场景泛化与自动化测试。在传感器层面,Simcenter Prescan也有着明显的优势。其不仅可以对毫米波雷达、激光雷达、摄像头进行元器件层面的物理建模,更是在功能发布前进行了实际传感器对标验证,光学试验室测试表明,Simcenter Prescan物理摄像头仿真模型与Sekonix SF3325摄像头的实测结果,具有高度的一致性,例如畸变模型的准确度高达98.4%[2]。
对上述技术需求与技术挑战痛点进行匹配,映驰科技泊车项目的仿真方案整理如下:
3.1停车场场景构建与场景泛化
停车场类型:露天停车场、路边停车场、地下停车场、多层停车楼;
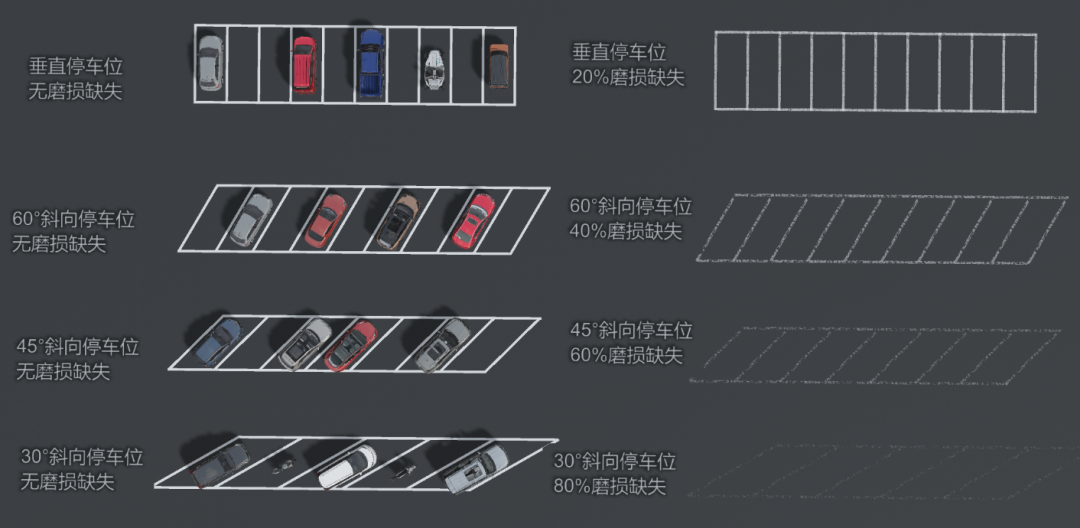
基础场景泛化生成130种泊车位场景,包括垂向、水平、斜列停车位类型等;
3.2多种停车场标线组合
停车场类型:露天停车场、路边停车场
标线虚实涵盖实线、虚线、混合线型;
标线类型:全封闭(口型)、半封闭(T型)、不封闭(U型);
3.3精准的鱼眼摄像头仿真模型
实现内参、外参、成像效应的建模,高精度的畸变还原,充分满足环视感知的建模[2]。
下图为不同停车位建模的俯视效果图。Simcenter Prescan包含大小型机动车约100多种,可灵活构建场景中车辆类型,丰富感知训练数据。同时,停车线可灵活配置,包括不同的形状、倾斜度与车道线本身的磨损缺失与物体遮挡(如雪糕筒对角点的遮挡、停车位内部物体、与井盖在停车位线的遮挡等)。
04客户收益
泊车系统的数字仿真方案,可快速定位算法和代码的性能短板、补充实车测试、降低硬件和人力投入,加速了开发周期。
4.1高效的测试验证
前期通过仿真测试发现算法Bug,并快速迭代改进;
中期引入仿真自动化测试流程,降低测试人力投入;
使用仿真补充实车测试,保证各算法版本高效、完整的自动化回归测试。
4.2便捷的开发探索
借助仿真验证新的状态机搭建方案,降低开发板开发周期;
对新的算法方案,进行仿真快速验证,加速算法开发速度。
05项目延展性
项目持续性与延展性体现在项目初期搭建完成后,项目的既定目标是否还能继续,项目是否可以持续地发展下去,且项目本身能否给使用者带来持续性的价值、更大的价值。在此项目的构建中,项目持续性与延展性也是重要的考虑因素。
在当前项目成果的基础上,考虑到后续项目的发展方向,结合数字化仿真的优势,可实现更完整的验证场景、特定化噪声模拟、基于仿真的完整评价系统与基于仿真的持续集成集成部署平台搭建。具体拓展思路如下:
1. 叠加目标级车位噪声,评估泊车规控算法性能证:
对车位角点真值引入噪声模型,验证泊车规控算法的鲁棒性;
2. 对停车位的感知识别:
停车位线磨损缺失与不同颜色;
物体遮挡:井盖遮挡、雪糕筒等障碍物覆盖;
3. 对停车位内文字标识的识别:
标识方式:文字、数字、字母、图案;
标识内容:限时、出租车专用、充电车位等;
4. 复杂障碍物的影响:
动态障碍物:停车场的行人、机动车、非机动车;
静态障碍物:立柱、标识牌、地锁、雪糕筒、塑料围栏等;
5. 依托仿真平台,构建更全面与便捷的AVP算法评价:
泊入成功率、泊车车速、泊车用时、揉库次数、泊车位姿;
6. 基于仿真的算法持续集成与持续部署(CICD) 平台搭建:
通过算法自动编译,构建单机SIL的CICD环境。
进一步提高效率、释放人力。
总之,通过引入西门子Simcenter Prescan数字化仿真平台,映驰科技优化了其自动驾驶项目开发与验证的业务流程,最大程度降低了人力和物料投入,优化了开发效率,提高了产品质量。相信映驰科技的数字化实践,会对自动驾驶行业的数字化转型提供范例和借鉴。
参考文献:
1:J. K. Suhr and H. G. Jung, "Fully-automatic recognition of various parking slot markings in Around View Monitor (AVM) image sequences," 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 2012, pp. 1294-1299, doi: 10.1109/ITSC.2012.6338615.
2:Edwin Rijpkema, Rogier van Aken, “Quality benchmark report Prescan Physics based Camera,” 7 August 2019 , 17.0201.1.NL.RE/FB



编辑推荐




最新资讯
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
-
NOA该允许驾驶员脱手么?
2025-04-02 08:37
-
联合国最新汽车法规清单(到R176)
2025-04-02 08:31
