




 广告
广告





















































汽车基础软件信息安全概述

安全车控操作系统
安全车控操作系统主要面向经典车辆控制领域,如动力系统、底盘系统和车身系统等,该类操作系统对实时性和安全性要求极高,生态发展已趋于成熟。面向安全车控操作系统的车规级安全实时操作系统内核要求支持 MCU 等控制芯片,兼容国际主流的系统软件中间件如 Classic AUTOSAR 标准等,满足实时控制功能安全应用需求,应部分达到 ISO26262 ASIL-D 级安全认证。安全车控操作系统主要由实时操作系统(Real Time Operating System)、硬件抽象层、基础软件、运行时环境和实时域控功能服务组成。其主要应用对象为 ECU 设备。ECU 对安全车控操作系统最基本的要求是高实时性,系统需要在规定时间内完成资源分配、任务同步等指定动作。嵌入式实时操作系统具有高可靠性、实时性、交互性以及多路性的优势,系统响应时间极短,通常在毫秒或者微秒级别,满足了高实时性的要求。目前,主流的安全车控操作系统都兼容 OSEK/VDX 和 Classic AUTOSAR 这两类汽车电子软件标准。其中,Classic AUTOSAR 平台基于 OSEK/VDX 标准,定义了安全车控操作系统的技术规范。

图1.1-3安全车控操作系统纵向架构
智能驾驶操作系统
智能驾驶操作系统主要面向智能驾驶领域,应用于智能驾驶控制器,该类操作系统对安全性和可靠性要求较高,同时对性能和运算能力的要求比较高。面向智能驾驶操作系统的系统软件以车规级操作系 统内核,支持高算力计算异构芯片,以标准的 POSIX 接口为基础,兼容国际主流的系统软件中间件如Adaptive AUTOSAR 等,满足智能驾驶不同应用所需的功能安全和信息安全等要求。与安全车控操作系统相比,智能驾驶操作系统平台要求主要体现在如下方面:
-
强大的计算能力,以满足图像识别和决策计算的要求;
-
强大的数据吞吐能力,以满足多传感器数据的实时接入和处理;
-
高度的灵活性、扩展性、可编程性,以满足多种算法模型的需要;
-
需要快速学习和易用性,以满足 ADAS 和自动驾驶算法所需调试、调优、测试。
根据当前异构分布硬件架构各单元所加载的内核系统安全等级有所不同,AI 单元内核系统支持 QM 到 ASIL-B 安全等级,计算单元内核系统支持 QM 到 ASIL-D 安全等级。智能驾驶操作系统发展趋势和特点是纵向分层,以实现层与层之间的解耦,方便快速开发和移植。
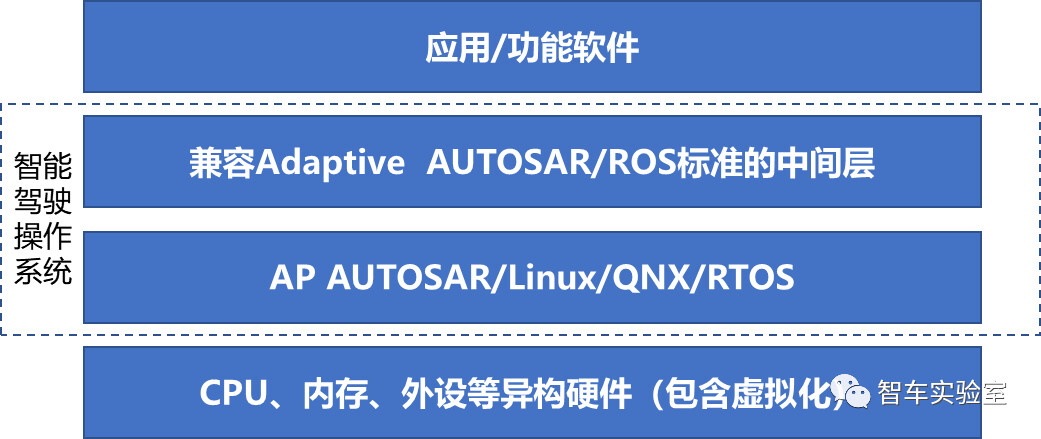
图1.1-4智能驾驶操作系统纵向架构
车载操作系统
车载操作系统主要为车载信息娱乐服务以及车内人机交互提供控制平台,是汽车实现座舱智能化与 多源信息融合的运行环境。车载操作系统应用于车机中控、仪表、T-BOX 等系统,提供导航、多媒体娱乐、语音、辅助驾驶、AI 以及网联等功能,对于安全性和可靠性的要求处于中等水平,但对数据安全合规性有特殊的要求。车载操作系统由系统软件和功能软件两部分构成。
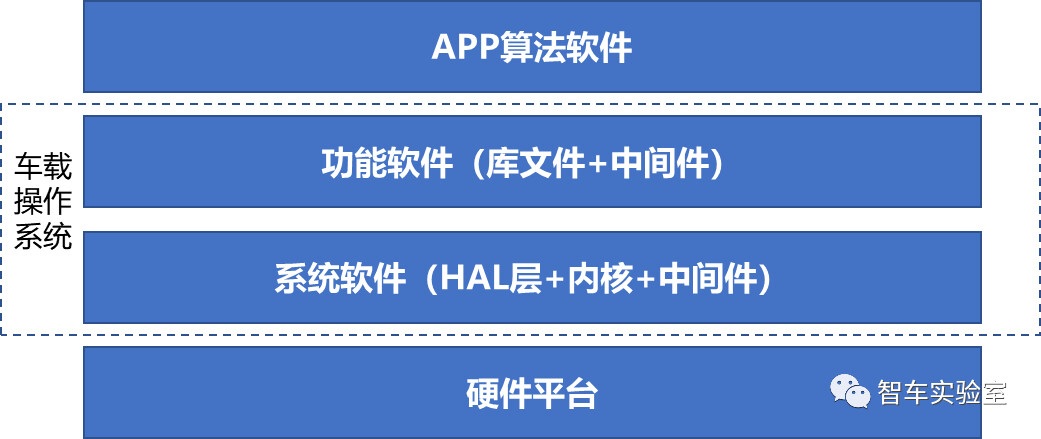
图1.1-5车载操作系统纵向架构
- 下一篇:国五/国六滑行方法对电能消耗有何影响?
- 上一篇:国内外政策、法规与标准现状



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
