




 广告
广告





















































标准解读丨ASAM OpenScenario 2.0系列之三:看懂术语是入门的关键

编者寄语:2022年7月,ASAM OpenScenario 2.0版本正式发布。作为ASAM自动驾驶仿真体系中的重要环节,本次OSC 2.0版本进行了较多内容的更新,针对自动驾驶仿真动态要素提出了更加完善的解决方案。本次系列解读将针对OpenScenario 2.0进行多方面的分析,敬请关注。
在之前的文章中,我们已经对ASAM OpenScenario 2.0的发布背景、概念与意义进行了阐述,具体请详见重磅成果丨ASAM OpenScenario 2.0正式发布。
标准总览请参见标准解读丨ASAM OpenScenario 2.0系列之一:标准总览。
01、ASAMOpenScenario标准概述
ASAM OpenSCENARIO包括特定于领域的语言规范和领域模型。该标准旨在描述驾驶模拟应用程序或任何利用场景描述的应用程序的动态行为和环境。ASAM OpenSCENARIO的主要用途是描述和构造复杂的场景(Scenario)。
这些场景主要包括以下操作(Maneuver):
-
多个车辆
-
其他交通参与者
-
复杂的环境相互作用
-
测试参数的复杂变化
-
复杂或复合测量标准的评估和分析
ASAM OpenSCENARIO主要用于以下用途:
-
虚拟环境开发
-
在测试轨道或试验场进行测试
-
功能验证(ADAS系统、自动驾驶系统等)
-
在环仿真测试(如HIL等)
-
真实行车数据解码
ASAM OpenSCENARIO可以与ASAM OpenDRIVE和ASAM OpenCRG一起使用。这些标准描述了驾驶模拟中道路网络和路面的详细信息。
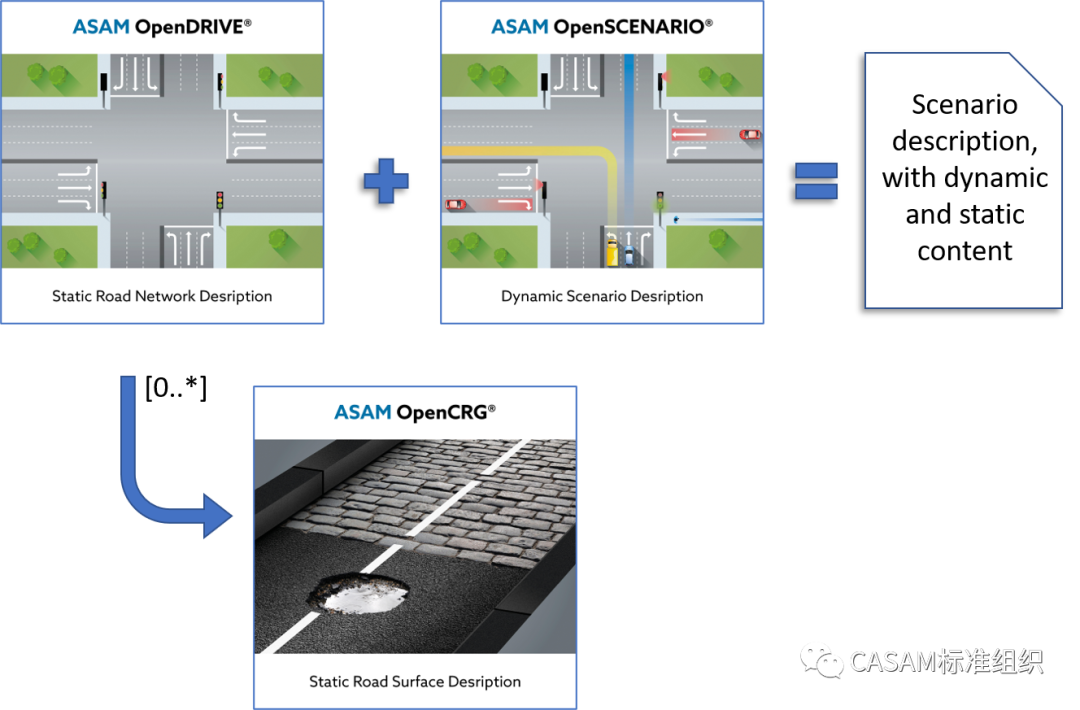
☝ ASAM OpenDrive、OpenScenario以及OpenCRG的关系
02、ASAM OpenScenario重要术语及定义
为了提升描述的准确性以及简洁性,OpenScenario标准同样采用了一系列专业术语,因此对术语的理解直接影响到对整个标准的把握与认知。
场景(Scenario)
场景是对驾驶基础设施上的物理对象和环境条件在一段时间内的行为或时间演变的描述,包括交通参与者的运动或环境条件的变化。
动作(Action)
动作Action是指参与者基本的、不可分解的行为。动作是一种可以执行或观察的行为。动作是抽象的,其实现是基于特定平台的,具体定义超出了OpenScenario的范围。
行动者(Actor)
可以执行特定动作的场景参与者。
具体化(Concretization)与抽象化(Abstraction)
具体化(concretization)和抽象化(abstraction)是相对的两个概念。具体化有时也称为精炼化(refinement)。具体化和抽象化的机制创造了一系列的抽象范围。理论上来讲,这个范围是连续的。在这个范围内,场景可以向任意一端移动。
抽象化场景意味着扩大场景所获得的合法空间。具体化场景意味着缩小场景所占用的合法空间。
抽象化等级(Abstraction level)
为了描述场景的时间发展,通常使用行动和事件以及相关参与者的目的地和对应的参数值,而场景的描述也可以根据需求和应用目的的不同而分成不同的层级。
以下列出了可以指定场景的不同抽象级别:
-
具体场景(Concrete Scenario)
-
逻辑场景(Logical Scenario)
-
抽象场景(Abstract Scenario)
-
功能场景(Functional Scenario)
以上四个层级的场景将在下篇解读中进行详细介绍。
不可知论(Agnostic)
数据的方法或格式与设备或程序的功能无关。
实体(Entity)
域模型元素的通用名称。实体可以是类(class)、接口(interface)或枚举(enum)。
类(Class)
Class即类,表示具有共同特征的一组事物。
Class可以是具象意义上的,也可以是抽象意义上的。如汽车类包括轿车、卡车、大巴车等,车道类可分为慢车道、快车道、超车道等,数据类可分为整型数据、布尔型数据、字符串型数据等。
主车(Ego Vehicle)
Ego vehicle指“本车”或者“主车”,即在场景中出现的被测试车辆。
事件(Event)
事件是指特定情况发生的已命名触发器。
设计运行范围(ODD)
ODD (Operational Design Domain) 指设计运行范围,是为被测试的驾驶系统专门设计的一套操作条件,包括环境、地理、时间、道路交通等限制条件。
现阶段自动驾驶技术尚未完全成熟,并不能保证车辆能够在任何情况下都能正常、安全地进行自动驾驶。因此,需要设计ODD来限定在何种环境下才能使车辆进行自动驾驶。如,奥迪A8的Lv3自动驾驶系统目前使用的前提条件为:
u行驶在高速公路或有中央隔离带和护栏的两车道以上的机动车专用公路上;
u所在车道和周边车道的车间距离在较近,即堵车状态下;
u车的行驶速度不超过60km/h;
u在传感器可检测到的范围内没有信号灯也没有行人。
这些条件就是奥迪A8的设计运行范围,它限制了自动驾驶系统可使用的环境、路况和速度条件。
OpenScenario文件(OpenScenario file)
指包含ASAM OpenSCENARIO版本2.0.0或更高版本代码的文件,可由兼容工具进行解析。这样的文件应该使用文件扩展名.osc来标识它们。这将它们与以前版本中使用.xosc文件扩展名的基于xml的OpenSCENARIO文件区别开来。
参数化(Parameterization)
参数化特指OpenScenario标准中对于参数的使用和应用。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
