




 广告
广告





















































马自达CX-60 AWD系统技术的开发

简述
纵置引擎4WD系统历史悠久,起源于四轮机械式驱动形式,前后扭矩分配进化为固定分配的中央差速器,之后随着采用电子控制多片离合器式的案例增多,逐渐演变为探索前后扭矩分配最优化的时代。而CX-60采用纵置引擎布局的AWD系统,既保留了基于后轮驱动的驱动方式的特点——中性转弯性,又平衡了AWD特有的稳定性,提供了更高维度的人马一体感。低附着路的强劲牵引力带来的稳定行驶自不必说,在高速公路上的直行稳定性以及随心所欲的操控性能。该AWD的水平已经大幅超越了基于前轮驱动的i-ACTIV AWD,作为在轿车中拥有世界顶级牵引力性能的AWD,可将动力系统的输出毫无保留地传递到路面。
另外,混合动力系统通过动力系统、制动系统与AWD的综合控制,在减速时可从四个轮胎回收更多的能量。通过针对各种行驶环境优化四轮的驱动力分配,在广泛的驾驶场景中,提供可令客户安心的行驶动力和低耗油量带来的高经济性。此外,还支持4缸及6缸纵置发动机和地板电池配置等,旨在实现轻量化、紧凑和高传动效率。
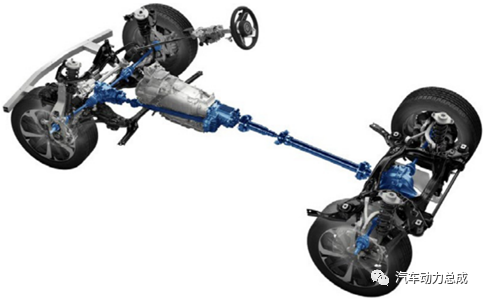
图1 CX-60 AWD布局配置
AWD系统
2.1 空间
马自达所追求的“人马一体”中,重要项目之一就是“提供理想的驾驶定位”。特别是作为纵置发动机的CX-60。包括AWD系统在内的驱动系统部件的小型化,最大限度地减少中心隧道向车室内的伸出,从而最大限度地增加脚下附近的空间,这是作为最重要项目进行开发的。如图2所示。
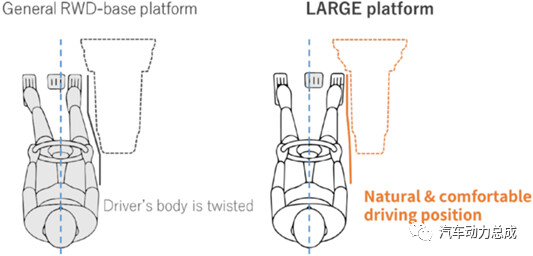
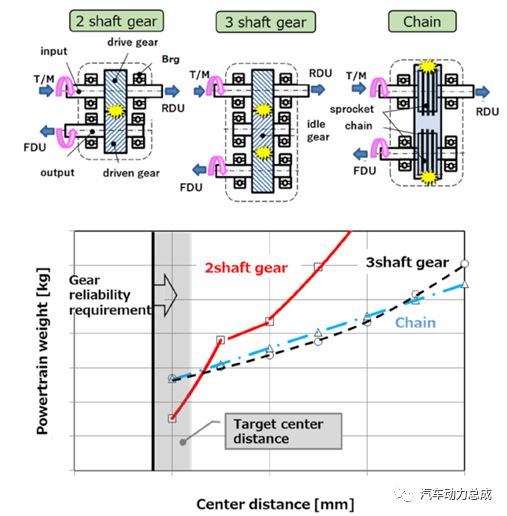
图2 CX-60驾驶员位置首先,关于从主驱动轴分支驱动力的“传动单元”(T/F),选择了在目标轴间距离上能够实现最轻量化和高效率的2轴齿轮式。如图3所示。
另外,在“前置缓冲单元”(FDU)方面,通过采用轴承单元,减小轴承部,达到前后长度及与发动机的偏移量最小。如图4所示。另外,通过分别设定T/F和FDU的减速比,实现2级减速,降低了传动轴的最高旋转,使轴径最小化。另外,新开发的8速AT单元内部的功能部件(阀体、电动油泵等)在单元开发之初就采用了考虑空心传动轴的结构,从而实现了轻量、紧凑的设计。如图5与6所示。
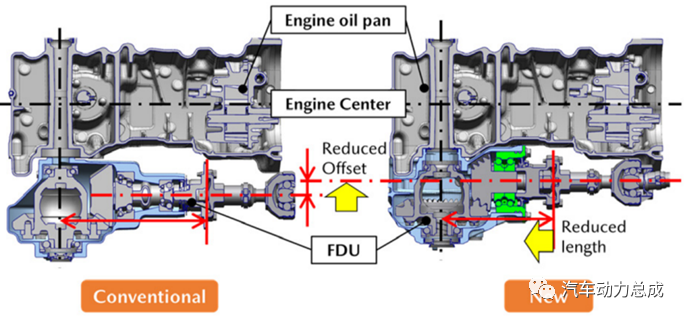
图4 FDU结构形式
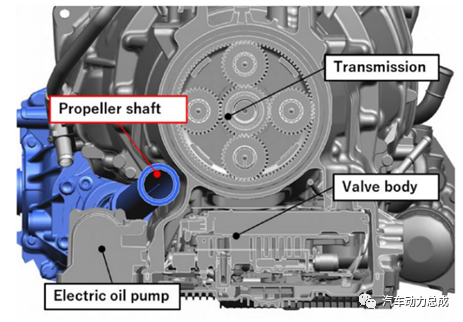
图5 变速器和传动轴截面图
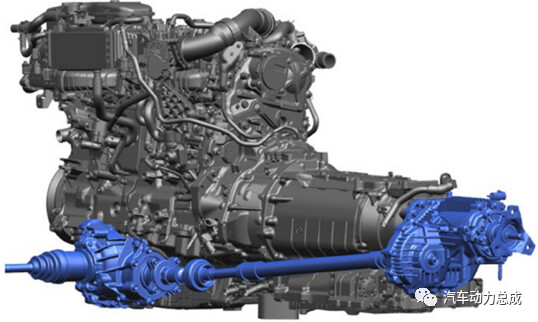
图6 动力总成轴测图
2.2 高效率
自第一代CX-5以来,马自达为了提高AWD车型的实用油耗,持续致力于降低AWD单元的阻力。CX-60作为支持高扭矩的AWD,除了在CX-5、CX-30中采用的旋转阻力降低技术外,还新开发了旨在降低高齿轮摩擦损失的高齿轮齿面平滑化技术。
(1) 关于齿面平滑技术
一般来说,齿轮是通过在齿面上涂覆复合材料,同时使齿轮对啮合来实现目标的相对齿形。其结果,齿面咬合前进方向上有筋,阻碍了齿面油膜的形成,高扭矩时齿轮的摩擦损失增大。该技术通过去除包裹工序中产生的筋纹,使齿面丁状化(形成许多小凹坑),提高油膜形成性,从而降低高扭矩时齿轮的摩擦损耗。如图7所示。
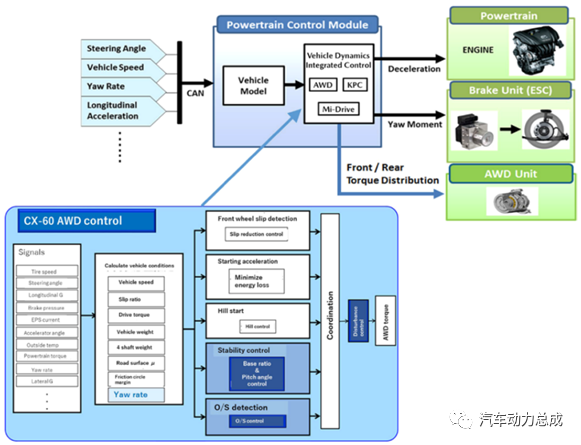
图7 齿轮齿面粗糙度
(2) 关于齿面平滑技术的损失降低效果
通过齿面平滑技术,在高扭矩时可将差速器齿轮的摩擦损失降低约35%,有助于降低车辆油耗和CO2排放量。如图8所示。
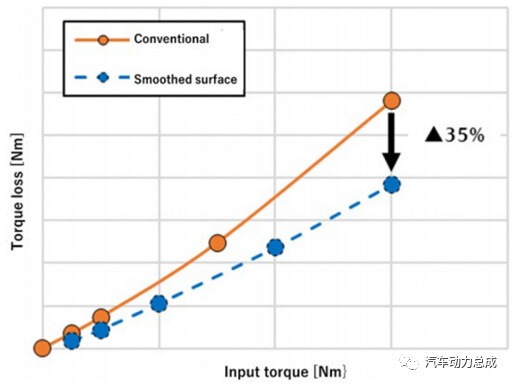
图8 损失降低曲线图
AWD系统的功能
3.1 更高人马一体为目标
CX-60方面,在保留后轮驱动为基础的驱动方式所具有的良好操控性的基础上,通过采用电子控制多片离合器式AWD来扩大稳定行驶领域,旨在提供更高次元的人马一体感,主要集中在以下要点上。如图9所示。
①AWD特有的稳定性(lowμ road&high-speed stability);
②扩大能够维持中性转向特性的领域(high speed, high G & reassuring performance);
③雪上和越野的高越野性(行驶场地扩展);
④接近2wd的实用油耗(续航里程)。
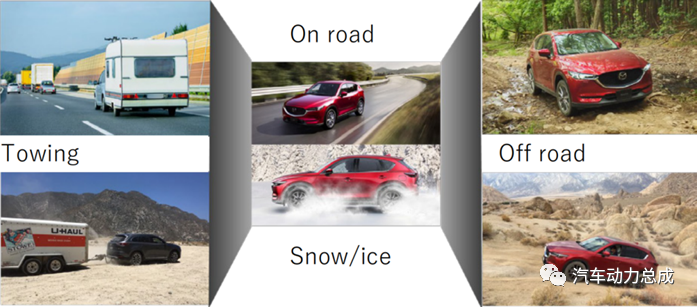
图9 路况示意
另外,通过AWD扭矩分配的优化,颠覆了以往RWD和4WD只能在转弯性和稳定性之间权衡的常识,通过突破转弯性和稳定性的兼顾。如图10所示。实现了整体动力学的进化。作为在轿车领域具有世界顶级牵引性能的AWD,开发出了将动力系统的输出传递到不同路面的系统,使之进化到大大超过以往基于前轮驱动的i-ACTIV AWD的水平。
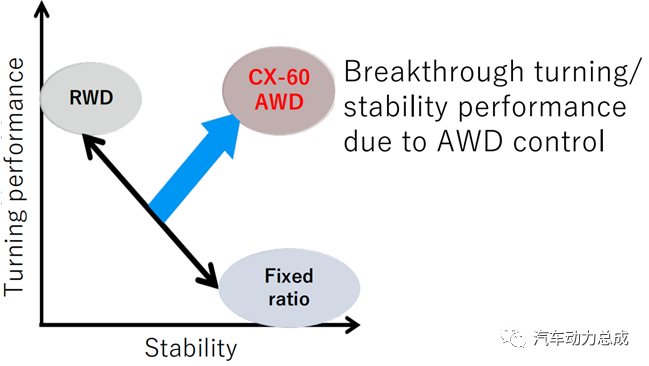
图10 AWD车型稳定&转向模型
转向潜力就越大的前轮驱动与AWD不同,前置扭矩分配的区域越多,稳定性越高,但由于转向不足,转弯性下降,很难确定分配比。另外,通过离合器传递扭矩的电子控制多片离合器式的扭矩分配在结构上需要输出侧比输入侧转速慢,因此包括转弯状态在内,前轴侧的转速必须慢。为了在最小化离合器拖拽损失等耗油量影响的同时实现理想的车辆行为和稳定性,主要集中在以下2点:①通过前后齿轮比差实现AWD扭矩传递的最大化;②前后扭矩分配对后轮驱动基础的最优化。
3.2 通过前后传动比差最大化
AWD扭矩传递通过前差速器/变速器传动比的组合,设定了在前后驱动系统中产生微小旋转差的传动比。如图11所示。这样一来,通过始终保持前后差转,就可以将目标扭矩迅速、准确地传递到前轮胎,以最小限度的扭矩分配实现了车辆稳定性的提高。如图11所示。
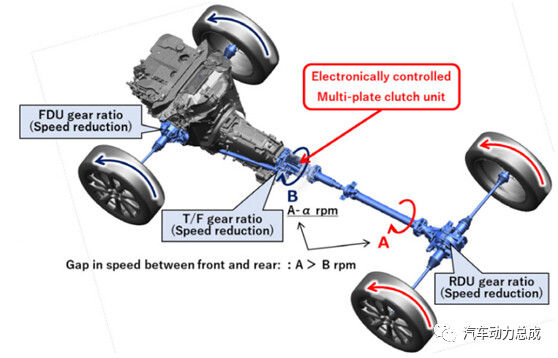
图11 .前/后驱动系统转速速差示意
3.3 前后扭矩分配
对后轮驱动应有的转弯性和AWD,为了在最小化耗油量影响的同时实现真正的稳定性,以上述前后齿轮比差设定为前提,根据制驱动力及轮胎负荷状态优化了扭矩分配。在轮胎摩擦圆内行驶时,可根据加减速严密地控制扭矩分配,以确保AWD的稳定性,转弯时则可通过前轮到后轮的扭矩分配变化来控制俯卧姿势。实现了以后轮驱动为基础的纯朴的操纵性。另外,在高速、高G和低μ路等盘旋时超过轮胎摩擦圆的场景下,除了通过检测轮胎前后打滑来控制打滑外,还通过检测转向过度或转向不足来控制驱动分配。使车辆行为稳定化如图12。另外,在再生制动时,通过与再生协调制动系统协同向前扭矩分配的控制,在确保车辆稳定性的同时,还可实现更多的能量回收。
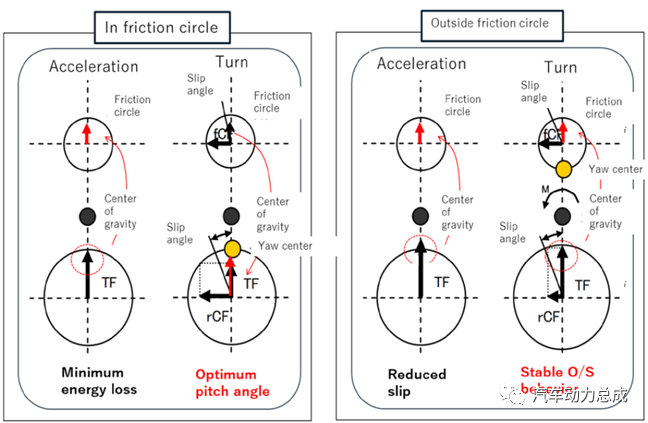
图12 AWD系统扭矩分配比率
实现前述扭矩分配的控制系统,如图13所示。通过在动力系统控制模块(PCM)内配置AWD控制逻辑,可快速检测发动机所产生的驱动扭矩信息,计算出目标前后驱动扭矩分配比,对AWD的多片离合器单元进行扭矩指示。另外,还将与后述的Mi-Drive和动力相位控制系统(KPC)相结合,通过在PCM内综合确定车辆运动目标并向各单元下达指示,实现了理想的车辆行为和稳定性。
图13 AWD控制系统
3.4 马自达智能Drive Select (Mi-Drive)
从CX-60开始采用并进化的Mi-Drive根据行驶场景设定了“NORMAL”、“SPORT”、“OFF-ROAD”、“TOWING”加上“EV”等5种模式。针对基础“NORMAL”,还根据各行驶模式各自的特点优化了AWD扭矩分配,在行驶条件大不相同的不同场景下实现了“人马一体行驶”。
(1) 运动
最大限度地发挥汽车的动态性能潜力,提高动力系统的响应性。同时通过提高操舵稳定性实现了强劲的行驶。
(2) 越野
在未铺设路面或深雪等恶劣路况行驶时,通过将AWD和牵引力控制系统(TCS)等行驶系统的特性改为注重牵引力,实现了更高的行驶舒适性。
(3) 拖车
在拖车的牵引和摩托车承载等装载时,结合对重量增加状态优化动力系统的输出特性,对拖车牵引状态优化AWD,从而提高了直行稳定性。
CX-60的AWD性能
通过前文所述的AWD系统,不仅在雪上等低μ道路上可实现强劲牵引力下的稳定行驶,在高速行驶时也可实现直行稳定性和滑行时随心所欲的操控性能。
4.1 低μ路起步加速性能
图14表示在低u路起步加速时的时间序列数据。在起步加速后立即将扭矩分配到前轮侧,将动力系统的输出毫无保留地传递到路面,实现了预期的车辆加速度。
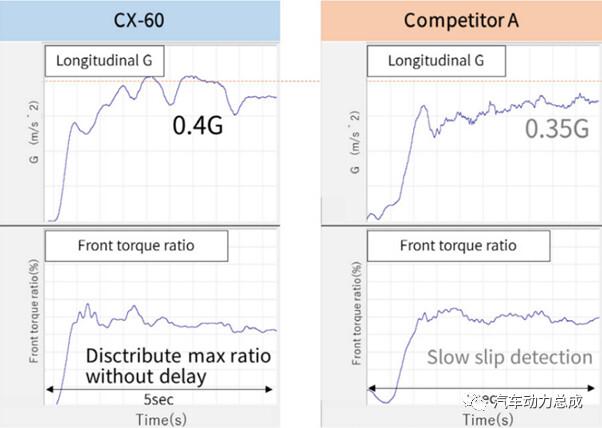
图14 低附路面弹射测试曲线
4.2 low mu road cycle stability
在图15中表示在低μ路径上转弯时的舵角和偏航率的关系的数据。CX-60的舵角和偏航率的关系呈线性,即使在低μ路径下也保持了中性转向特性。
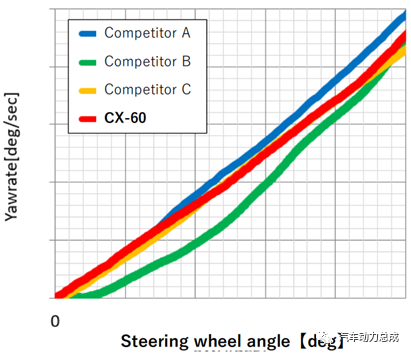
图15 低附路面转向特性
另外,在图16中表示转弯加速时的时间序列数据。在虚线踩下油门的时机之后,竞争车型表现出了较强的转向不足倾向,而CX-60则通过后轮驱动,一边转向一边加速。在雪上也提供了驾驶员随心所欲的行为可控性。
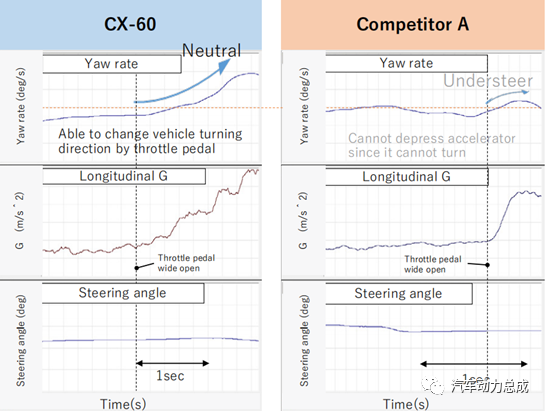
图16 偏航运动控制油门踏板
结束语
充分利用电子控制多片离合器式AWD系统,作为高性能全时四驱系统,通过将发动机和电动机的大功率始终优化分配到前后轮,实现了凌驾于以往以前轮驱动为基础的i-ACTIV AWD的操控稳定性和牵引力性能。直到高速和高G区域都能实现后轮驱动基础AWD才能实现的随心所欲的自然车辆行为,从而提供了更高水平的人马一体感。



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑨
2025-04-27 15:29
-
智驾标准法规体系大全
2025-04-27 15:28
-
国内最大汽车创作者大会开幕,懂车帝投入5
2025-04-27 13:18
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
