




 广告
广告





















































基于激光雷达和高精地图的无人车自定位研究


本文首发《汽车测试报告》,由作者授权发布
摘要:人工智能领域的飞速发展带动了无人驾驶技术的不断进步,无人车实现实时定位可以方便其进行路径规划和避障。该文提出了一种激光雷达与高精地图相融合,并利用NDT点云配准算法实现无人车自定位的方案。该方案在无人驾驶平台进行了实车验证,结果表明,该文提出的方案可以准确进行无人车实时定位和跟踪,并满足多场景下的工程应用需求。
关键词:无人驾驶;激光雷达;高精地图;NDT点云配准;无人车自定位
作者:马志远 曹景胜 郑健健 杨意(辽宁工业大学汽车与交通工程学院)
注:本文系辽宁省大学生创新创业训练项目(S202110154003)、2021年辽宁工业大学大学生创新创业训练项目(2021003)研究成果。
无人车自定位是无人驾驶技术领域非常关键的一步,能够对无人车实现准确、实时的定位,可以更全面了解无人车实时信息,从而使无人车进行避障和路径规划以及路径跟踪控制等。目前,对于无人车定位主要基于视觉技术,基于视觉技术的定位是一种简单而且直观的方式,这种方式可以配合其他传感器一同使用,也可通过前后帧图像之间对比的方法独立使用[1-2]。本文针对无人车自定位问题设计一种基于视觉技术的定位方案,将高精地图点云数据与激光雷达点云数据相融合,通过NDT点云配准算法,实现无人车自定位。该方案流程如下图1所示。
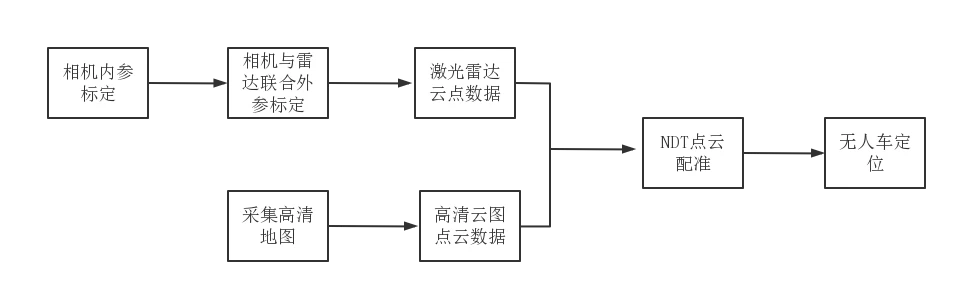
图1 无人车自定位流程
1.传感器参数标定
1.1相机内参标定
相机标定就是从世界坐标系转换为相机坐标系,再由相机坐标系转换为图像坐标系的过程,计算相机内部的参数。面阵相机初始参数共有8个,如表1所示。
表1 面阵相机初始参数
参数 参数说明
f 相机镜头焦距
k 图像径向畸变量级,k<0桶形畸变,k>0枕形畸变,初始值为0
SX 缩放因子,相邻像元的水平距离
SY 缩放因子,相邻像元的垂直距离
CX 图像主点位置
Cy 图像主点位置
Numcol 图像的长度
NumRow 图像的宽度
面阵相机与被拍摄的目标物体之间必须有相对的移动才能够拍摄到有用的图像。本文的标定板采用的是12×8格,然而在真实的标定过程中是通过棋盘内部的角点扫描实现的,所以标定板的最终格数设定为13×9格。
利用Autoware软件能够实现相机标定,使用相机标定模块cameracalibrator.py,界面右侧有X、Y尺度和俯仰信息,来回晃动棋盘格使Calibration按钮变为绿色,根据窗口提示使参数满足要求,相机的标定即完成。1.2相机与雷达联合外参标定激光雷达技术在过去的几十年里不断发展进步,目前在自动驾驶领域仍然是一项十分关键的技术[3-4]。激光雷达通过向目标物体持续不断地发射激光束实现探测,并收集反射回来的光束处理成点云数据,最后将点云数据用配准算法进行配准处理,得到高精度三维地图。本文实验中所采用的激光雷达为VLP-16。联合标定是通过Autoware软件实现的,首先得到相机内参数据,启动雷达,调出点云图像,最后将窗口中的像素点和雷达的点云数据进行一一对应。
2.高精地图制作
高精地图目前已成为无人驾驶不可或缺的部分,高精地图的制作也逐渐成为无人驾驶技术领域中的一项关键技术[5-6]。同普通电子地图比较,高精地图精度高。一般来说,普通电子地图的绝对精度在10 m左右,而高精地图可达到20 cm。而且地图中的信息也更加全面,包含了丰富的道路信息。本文采集了校园九号教学楼周围的道路信息,制作高精地图。
3.点云配准选择
3.1 ICP点云配准算法
ICP算法是点云配准算法中适用性比较高的一种算法,最小二乘法的数学思想是ICP算法的本质[7-8]。通过迭代方式来求解点云之间的姿态变换关联,算法完成的条件:一是达到了所设定的迭代次数,二是满足对误差的要求。图2为ICP算法示意图。
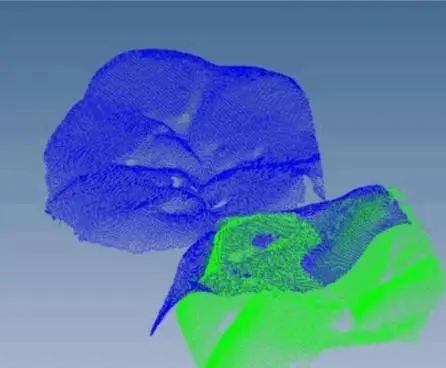
图2 ICP算法示意
P、Q是位于三维空间的3D点云,以下是ICP算法对帧间位姿的求解步骤。两组点云之间距离最小的匹配点对(pi,qi)。

基于点对(pi,qi)与帧间位姿的大概值来构造目标函数,然后对其进行最优化位姿估计。

最优位姿估计与点云P执行位姿变换后,得到新的点云P’。

如果P和Q间满足平均距离比特定阈值小或者达到了所要求的迭代次数,那么迭代计算将停止,如果不满足上述要求则P’会替换P继续进行迭代计算。虽然ICP算法在点云配准算法中使用程度高,但ICP配准算法还存在一定的缺陷,比如它不能确保在空间中距离近的两帧匹配点被认为是同一点。另外,这种情况在再次扫描位姿相对比较远的匹配点时会凸显,而且会导致局部最优的情况。
3.2 NDT点云配准算法
NDT配准算法是基于正态分布的理论。该算法对两帧点云的位姿计算如下:对三维空间进行切分,切分成许多小立方体,并对其中的点云数据进行均值和方差的计算。将该方差和均值作为基准,最终拟合成正态分布的形式。其中均值和方差的计算公式为:
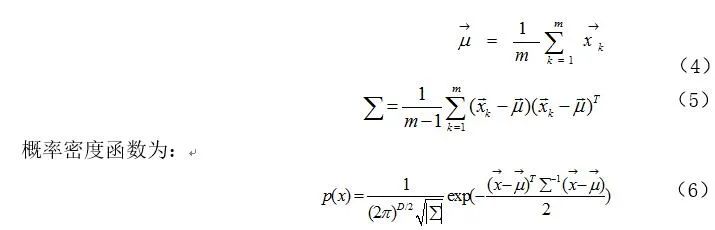

图3 三维点云正态分布变换示意
根据划分的立方体的概率密度函数,将第二帧点云数据中的空间点根据之前估计的位置和姿态关系进行变换。如图3所示,当空间中的一个点被变换时,如果它落在第一个帧中的一个小立方体上,那么应该计算这个点的响应概率。待优化目标函数为:

式中:

为三维空间点,R为旋转矩阵,t为平移向量。NDT算法在配准时基于概率密度函数,不是简单利用特征点进行匹配。NDT配准算法与ICP算法相比更适合处理大量点云数据的匹配。NDT配准算法耗时稳定,跟初值相关不大,初值误差大时,也能很好纠正过来。因此本文选择了NDT配准算法进行点云配准。
4.无人车自定位实车验证
4.1无人车试验平台
本文利用已经进行了改装的中华V3汽车构建无人驾驶试验平台,该试验平台分为传感器部分、供电系统和硬件结构。其中,传感器部分包括单目相机和激光雷达,硬件结构包括PC机、工控机、转向电机及控制器、CAN总线等。该平台由大型移动电源供电。CAN总线主要是用来传输跟踪控制信号,将来自工控机的信息下发给执行机构。工控机还对CAN总线传输的信号如前轮转角等进行数据处理,并送到计算机控制结构。
4.2无人车自定位测试
本文选取了包含直线和弯道的试验场地,通过激光雷达和单目相机得到了高精地图,并利用无人驾驶平台进行实车试验。无人车在需要进行转弯时,需要通过LQR前馈控制算法控制前轮转向,并在直线行驶的时候不断修正跟踪误差。最后可以得出车辆实时自定位及跟踪效果图。
5结束语
本文利用激光雷达对道路环境进行信息采集,形成点云数据,并利用NDT算法进行配准,无人车的实时位置可以在高精地图中呈现,实现了路径跟踪控制技术对高精度定位的需求,将试验路径添加到Autoware软件中,利用控制算法对前轮转角进行控制,软件给工控机下发信号,工控机再通过CAN总线控制执行电机,最终实现跟踪控制。本文的方案实现了无人车的实时自定位。
参考文献:
[1]唐智威.基于视觉的无人驾驶汽车研究综述[J].制造业自动化,2016(8):134-136,140.
[2]郝非凡,马翔越,李昊洋,等.自动驾驶汽车探测传感器及其融合技术综述[J].山西电子技术,2022(3):93-96.
[3]刘经南,吴杭彬,郭迟,等.高精度道路导航地图的进展与思考[J].中国工程科学,2018(2):99-105.
[4]杨宜林,李积英,王燕,等.基于NDT和特征点检测的点云配准算法研究[J].激光与光电子学进展,2022(8):198-204.
[5]杨玉泽,孙英伟,林文树.基于FPFH特征和NDT算法的树木点云配准[J].西北林学院学报,2019(5):141-146.
[6]张文安,汪伟,付明磊,等.基于自适应零速修正机制的低速无人车定位方法[J].传感技术学报,2022(1):63-71.
[7]牛国臣,王瑜.基于多约束因子图优化的无人车定位与建图方法[J].北京航空航天大学学报,2021(2):306-314.
[8]王庆闪,张军,靳欣宇.基于激光雷达在无人车中的定位与建图的应用研究综述[C]//中国计算机用户协会网络应用分会.中国计算机用户协会网络应用分会2018年第二十二届网络新技术与应用年会论文集.北京:北京联合大学北京市信息服务工程重点实验室,2018:123-124,36.
作者简介:
马志远,辽宁工业大学汽车与交通工程学院本科生,研究方向为智能汽车电子技术研究和开发;
曹景胜,辽宁工业大学汽车与交通工程学院副教授,研究方向为智能汽车关键技术研究和开发;
郑健健,辽宁工业大学汽车与交通工程学院本科生,研究方向为智能汽车电子技术研究和开发;
杨意,辽宁工业大学汽车与交通工程学院本科生,研究方向为智能汽车电子技术研究和开发。
END
《汽车测试报告》征稿




编辑推荐




最新资讯
-
标准解读丨ISO 21111 《道路车辆车载以太网
2025-03-31 19:15
-
清研精准兆瓦级充放电测试设备——重新定义
2025-03-31 19:13
-
强强联合:imc FAMOS内嵌Python接口,提高
2025-03-31 19:12
-
汽车动力电池与发动机系列标准宣贯会在武汉
2025-03-31 16:08
-
氢内燃机2.0-西南研究院(SwRI)启动第二阶
2025-03-31 16:06
