




 广告
广告





















































道路车辆 侧风敏感性 风机输入开环试验方法

道路车辆在行驶过程中往往会受到侧向风的影响,特别是在高速公路等开阔道路上,车辆的稳定性和安全性可能会受到很大的挑战。因此,对于车辆的侧风敏感性进行测试和评估是非常重要的。
道路车辆侧风敏感性风机输入开环试验是一种用于评估道路车辆对侧向风的响应的测试方法。该测试方法利用风洞和侧向风机等设备,通过测量车辆在不同侧向风源位置下的输出数据,来确定车辆在侧向风条件下的敏感性。测试数据可以包括车辆的速度、横向偏移、侧向力和轮胎力等参数。
通过对测试数据的分析和处理,可以确定车辆在不同侧向风源位置下的响应特性,并为改进车辆设计和提高行驶安全性提供指导。此外,道路车辆侧风敏感性风机输入开环试验还可以为制定相关标准和规范提供依据,以确保车辆在侧向风条件下的安全性能。
总体而言,道路车辆侧风敏感性风机输入开环试验是一种重要的道路车辆性能测试方法,它可以帮助工程师评估车辆的稳定性和安全性,并为改进车辆设计提供有用的参考。该测试方法在汽车工业和道路交通安全等领域有广泛的应用。
为了提升道路车辆在强风环境下的行驶安全性,保证汽车侧风 稳定性测试方法的规范性,国家标准 GB/T 41722-2022《道路车辆 侧风敏感性 风机输入开环试验方法》已于 2022-10-14 发布,并将于 2023-05-01 正式实施。
以下试验方法规定了一种由风机设备产生侧风进行汽车侧风敏感性试验的开环试验方法。适用于M₁ 、N₁ 类车辆,也适用于乘用车列车,其他类型车辆可参照执行。

道路车辆 侧风敏感性 风机输入开环试验方法
1 范围
本文件规定了一种由风机设备产生侧风进行汽车侧风敏感性试验的开环试验方法。本文件适用于M₁ 、N₁ 类车辆,也适用于乘用车列车,其他类型车辆可参照执行。
注:本文件规定的试验条件不代表真实驾驶工况,可用于定量试验汽车受到侧风作用的响应。本文件规定的侧风 条件不是直接模拟自然风条件,规定的风速相当于自然条件下较为苛刻的情况。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文 件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于 本文件。
GB/T3730.2—1996 道路车辆 质量 词汇和代码(ISO 1176:1990,IDT)
ISO8855 道路车辆 车辆动力性和道路保持能力 词汇(Roadvehicles—Vehicle dynamics and road-holding ability—Vocabulary)
ISO 15037-1:2006 道路车辆 车辆动力学试验方法 第1部分:乘用车通用条件(Road vehicles—Vehicle dynamics test methods—Part 1:General conditions for passenger cars)
注:GB/T 40501—2021轻型汽车操纵稳定性试验通用条件(ISO 15037-1:2019,MOD)
3术语和定义
ISO8855 界定的术语和定义适用于本文件。
4 原理
车辆在行驶过程中,其运动会受到侧风的干扰。本文件规定的试验方法,通过测量一系列用于表征 汽车在侧风条件下行驶表现的参数来定量评价汽车的侧风敏感性。具体方法为试验车辆沿着一条直线 路径行驶,经过一段由风机设备产生的侧风试验区域,测量该试验车辆的响应。如无特殊试验需求,试验车辆的转向盘保持固定。
本文件提出两种测量侧向偏移的方法:
——直接测量方法,测量汽车位置或残留在路面上的染色剂轨迹;
——间接测量方法,利用测量出的汽车动态参数进行计算。
5 参照系
应按照ISO 15037-1:2006的规定选择参照系。
6 测量变量
试验过程中应测量以下变量:
a) 横摆角速度,ψ;
b) 侧向加速度,ay;
c) 转向盘角度, δn;
d) 纵向车速,Ux。
试验过程中可以选择测量以下变量:
a) 侧向偏移,γ;
b) 侧倾角,更;
c) 侧偏角,β;
d) 侧向速度,Uy。
本章并未列出全部测量变量。
7 测量仪器
7.1 通则
第6章列出的各测量变量应通过适当的传感器测量,随时间变化的历程应通过基于时间的多通道记录仪记录。侧向偏移可在试验完成后直接测量。
组合传感器和记录系统的典型测量范围及推荐最大误差值如表1所示。
表 1 组合传感器和记录系统的典型测量范围及推荐最大误差值
测量变量
典型测量范围
推荐最大误差值
横摆角速度
—10°/s~+10°/s
±0.1°/s
侧向加速度
-5 m/s²~+5 m/s²
±0.05 m/s²
转向盘角度
-30°~+30°
±1°,分辨率小于0.3°
纵向车速
0 m/s~40 m/s
±0.4 m/s
侧向偏移
5 m
士0.02 m
侧倾角
-10°~+10°
±0.1°
侧偏角
-5°~+5°
士0 . 2°
侧向速度
— 10 m/s~+10 m/s
±0.2 m/s
注:测量上述某些变量的传感器较难获得且不被广泛使用,试验者需根据需要自行改装或开发相应仪器。如出 现系统误差超出建议最大值的情况,和实际最大误差一起在试验报告中做详细陈述(见附录A)。
以传统转向系统为例。
7.2 传感器设置
7.2.1 通用要求
应符合ISO 15037-1:2006 中4.2的要求。
7.2.2 侧向偏移的测量
侧向偏移可通过合适的仪器设备或通过染色示踪法进行直接测量,也可利用数值计算法间接测量 (见11.3.3)。染色示踪应通过喷水装置在试验跑道上来实现。喷水口应位于距试验路面0.02 m 高 处,可用弹性管延伸。
喷水装置安装点位置宜靠近中间坐标系的Z 轴。若无法实现,能通过修正以获得在容差范围内的 侧向加速度数据。
7.3 数据处理
应符合ISO 15037-1:2006 中4.3所包含的记录系统和数据处理要求。
8 试验条件
8.1 通用要求
试验条件应按照ISO 15037-1:2006 中5.1以及本文件中8.2与8.3的规定进行。应在试验报告中 记录任何试验偏差(见附录A) 以及描述各自结果的图表(见附录B)。
8.2 试验道路
试验应在硬度均匀且干净无污染的路面进行。试验道路的横向坡度以及任意50 m 间的纵向坡度 均应小于2.5%。
试验道路的路面应是平坦的沥青或混凝土表面或者其他高摩擦表面。
试验路面应为从侧风区前至少100 m 至侧风区后100m 的范围内,宽度应不小于5m; 试验道路在 侧风区后的宽度应不小于7 m。
除规定的试验路面条件外,试验道路应具备足够的缓冲区。
8.3 气候条件
环境风速在试验期间宜尽可能小,任何方向上的风速均不应超过3 m/s。标准试验条件下宜使用 干燥路面,也可使用无明显积水的湿路面。
应在试验报告中记录气候条件(见附录A)。
8.4 试验车辆
应符合ISO 15037-1:2006 中5.4的要求。
8.5 车辆载荷状态
8.5.1 通用要求
试验应在8.5.2定义的最小载荷状态和8.5.3定义的最大载荷状态下进行,也可根据需要在其他载 荷状态下进行:
不应超过GB/T 3730.2—1996 中4.8和4.13定义的最大允许总质量和最大允许轴荷。
试验过程中应对车辆载荷进行合理布置,使其重心位置和转动惯量与平常载荷状态下相比尽量不 发生偏移。应在试验过程中测量轮荷并在试验报告中记录(见附录 A),
8.5.2 最小载荷状态
最小载荷状态下,试验车辆总质量应包括整车整备质量、驾驶员以及仪器设备的质量。驾驶员以及 仪器设备的质量合计宜不超过150 kg。
8.5.3 最大载荷状态
最大载荷状态下,试验车辆总质量应为最大允许总质量。
9 风机设备
试验的侧风由风机设备产生,侧风平均风速应达到20 m/s 士3 m/s (在周围环境风速小于1m/s 的 条件下)。计算平均风速的剖面应沿基准行驶线,覆盖侧风区的长度和试验车辆的高度。应在试验报告 中记录相对于基准行驶线的标称风向角,以及覆盖整个侧风区长度和高度范围的风速剖面图(见 附录A)。侧风区标称长度一般由风机阵列决定,该标称长度应不小于15 m, 宜尽可能大于25 m。应在 试验报告中记录侧风区标称长度(见附录A)。
10 试验程序
10.1 预热
应符合ISO 15037-1:2006 中6.1的要求。
10.2 试验车速
试验车速定义为纵向标称车速,标准试验车速为100 km/h。
可使用其他试验车速,步长宜取20 km/h。
试验期间,侧风区起点x。之前的纵向车速的公差应在士2 km/h 以内。在侧风区起点xo 之后,油 门踏板应固定。
10.3 驾驶操作
试验应在驾驶车辆沿着基准行驶线(直线)行驶条件下进行。当车辆接近侧风区时,允许转向修正 将车辆维持在基准行驶线上。但在侧风区起点x。之前40m 处(见图1),到起点之后以试验车速行驶 2 s的位置点xa 之间,转向盘应保持固定。
在车辆通过侧风区点xa前,转向盘转角的最大值与平均值的差值应不超过2°。宜使用可以提高试验质量的辅助工具固定转向盘。
10.4 试验次数
试验应进行不少于5次。
10.5 使用染色示踪法测量侧向位置点
使用染色示踪法测量侧向偏移,即由侧风引起的横向位置改变(见11.3.2),应在4个测量点测量车 辆的横向位置(见图1),分别为侧风区起点xo之前40 m 处、20m、x。处以及侧风区起点之后以试验车
速行驶2 s 后的位置点xa处。如有需要可设置中间测量点。
注:横向位置可通过路面的染色轨迹测量。
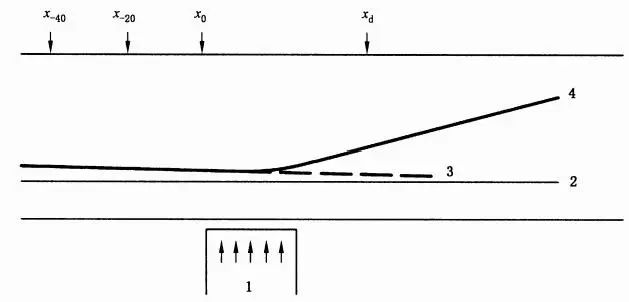
标引序号说明:
1 ——风机;
2 ——基准行驶线;
3 ——参照线;
4 ——车辆行驶轨迹;
x-40 ——侧风区起点之前40 m 处测量点;
x-20 ——侧风区起点之前20 m 处测量点;
x₀ ——侧风区起点,为风机前缘延长线与基准线的交点;
xa ——侧风区起点之后以试验车速行驶2s后所对应的测量点。
图 1 试验轨道与测量点布局
10.6 数据筛选
如试验车辆在侧风区起点前40 m 到侧风区起点间的横向位置变化大于0.2 m¹),应排除该数据以 降低初始条件带来的计算误差。
注:现阶段测量车辆位置的车载传感器,其使用广泛性和可靠性皆较差;因此可由试验观察员决定每轮试验结果是 否在允许范围内。
11 数据分析
11.1 通用要求
试验结果应以峰值或脉冲值的形式记录(见图2)。如使用峰值,应考虑测量系统的带宽,推荐使用 小幅带宽。
11.2 横摆角速度及侧向加速度
横摆角速度及侧向加速度记录形式见附录 B。
如要求计算横摆角速度及侧向加速度的脉冲值,方法如下。将脉冲值定义为在信号值超过峰值 50%的这段时间内的平均信号值(见图2)。
首先以信号零值作为初始参考值定义最大输出时间tpek和初始峰值(见图2)。时间点to 应首先定
1) 初始条件对试验结果有很大的影响。侧风区起点前40 m 和 0m 点之间的横向位置偏移0.2 m 在允许误差范 围内。
义为沿时间轴回溯当信号值开始变为低于0 . 15倍峰值时的时间点。因为转向盘从侧风区起点之前 40 m处起将被固定(见10 . 3),输出信号的参考值为从时间点t-4o后0 . 2 s 算 起 到 时 间 点to 前0.2 s 间 信
号值的平均值。注意时间点t-4o时速度值取决于纵向车速,但也可采用试验车速进行计算。
以下参数可使用该参考值进行迭代计算:
——峰值;
——to;
——新参考值。
直至连续两次参考值的差小于峰值的0 . 5%为止。最终参考值将用到最终峰值与脉冲值的计算当中 。
如有其他测量变量,该变量的信号峰值与脉冲值应一 同进行计算。
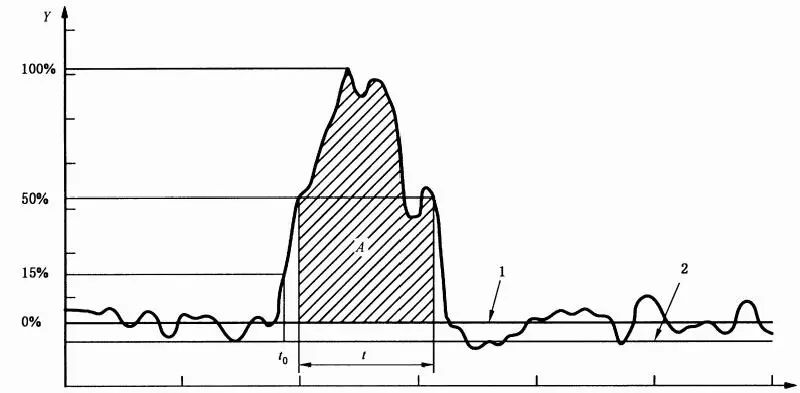
X标引序号说明:
1 ——参考值;
2 ——信号零值;
X ——时间轴,单位为秒(s);
Y ——响应变量。
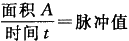
图 2 脉冲值定义(单 一 响应变量)
11.3 侧向偏移
11.3.1 通用要求
侧向偏移可通过直接测量染色轨迹或数值计算法确定。
11.3.2 染色示踪法
染色示踪法通过残留在路面上的染色剂轨迹测量侧向偏移,即侧风区起点之后以试验车速行驶2 s后 的 位 置 点 xa 处的偏移。该侧向偏移需要获取染色轨迹与参照线的垂直距离。
参照线应为包括侧风区起点及其前方测量点在内的3个测量点处车辆位置的拟合线 .
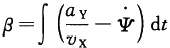
11.3.3 数值计算法
根据侧向加速度、横摆角速度与纵向车速的记录数据,侧风区起点2 s 后的侧向偏移可由式(1)~式(3)获得。
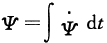
(1)
(2 )

(3)
式中:
在数值计算法中,参照线假定为一条沿道路中心线的直线,也可替换为如11.3.2中定义的用染色 轨迹获得的参照线。
总的来说,风机输入开环试验方法是一种有效的测试方法,可以在控制的环境下对车辆在侧风条件下的性能进行测试。但需要注意的是,由于测试环境的局限性,测试结果可能不能完全反映车辆在实际道路条件下的表现。因此,需要结合实际道路测试和模拟分析等方法,全面评估车辆的侧风敏感性。
随着自动驾驶技术的发展,未来可能会出现更加智能化和自动化的侧风敏感性测试方法。例如,可以利用虚拟仿真技术和人工智能技术,通过模拟分析和自动化驾驶测试等方法来评估车辆在不同侧风条件下的表现。这将进一步提高车辆的安全性和稳定性。
汽车研发·测试知识服务平台

关注了解最前沿汽车研发测试技术动态
品牌推广 | 内容合作 | 投稿 | 直播课程 | 转载开白
请在公众号后台回复 合作







最新资讯
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
-
EMC成为新贸易壁垒,零跑在乌兹被全面叫停
2025-04-07 08:37
-
Euro-NCAP 2026 鞭打规程解读
2025-04-07 08:36
