




 广告
广告





















































技术科普丨如何实现单车智能与V2X融合协同控制功能研究与验证?

“单车智能+车路协同”已被视为未来自动驾驶和智慧交通发展的重要技术路径,进行融合协同控制功能仿真验证对于产业发展和加速落地具有重要意义。本文将带来单车智能与V2X融合仿真系统的概括与介绍。
01、车路协同技术发展情况概述
目前,V2X技术发展已经取得了显著进步,其应用可分为近期和中远期两大阶段。近期通过车车协同、车路协同实现辅助驾驶,提高驾驶安全,提升交通效率;以及特定场景的中低速无人驾驶,提高生产效率,降低成本。中长期将结合人工智能、大数据等新技术,融合雷达、视频感知等技术,通过车联网实现从单车智能到网联智能,最终实现完全自动驾驶。

“单车智能+车路协同”已被视为未来自动驾驶和智慧交通发展的重要技术路径,5G-V2X是其实现的重要基础。《中国新车评价规程(C-NCAP)路线图(2022-2028年)》中明确应用C-V2X车联技术实现主动安全场景,比如引入基于C-V2X通信技术的安全预警场景,丰富自动紧急制动的测试场景。C-V2X提供的通信和联网能力,将助力智能汽车在未来实现自动驾驶所需的协同感知、决策和执行控制功能。“单车智能+车路协同”自动驾驶成为未来的发展趋势,但目前关于单车智能和V2X技术融合后的新应用功能探索研究比较少并且缺乏研究、验证环境及相关探索工具。虽然已有国内建成的车联网先导区可以开展融合协同控制功能验证,但融功能研究探索实施起来还不是很便捷,场景复现性差,测试成本高。单车智能与V2X融合协同控制功能研究与验证系统能发挥出巨大优势,可以作为融合功能研究探索工具。其中行业对于融合功能的维度可以分为两个层次:
01、弱融合
单纯增加V2X技术,OBU单独发出预警,比如路口鬼探头场景。典型的标准场景均可应用。将单车智能车辆直接加上V2X技术。方便直接量产应用。
02、强融合
OBU获得的信息和ADAS 传感器或者自动驾驶控制器获得的单车智能传感器信息进行融合,控制器根据二者信息综合决策发出下一步指令,深度融合后的新应用功能可能和ADAS功能或者自动驾驶功能响应一致,也可不一致。包含CADAS和 CAD。比如C-NCAP中主动安全场景:速度预警场景、速度辅助系统(C-SAS)、AEB鬼探头场景,C-AEB、盲区监测系统C-BSD等。
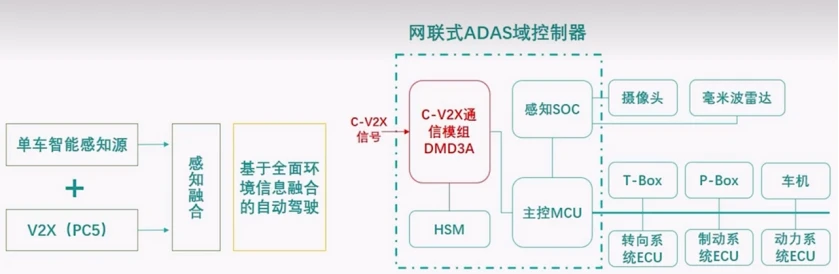
目前市面上已有一些C-V2X与单车视觉、毫米波感知进行融合的域控制器产品,支持C-V2X直连通信,可实现车车(V2V)、车路(V2I)协同,并集成前向视觉和雷达处理功能,将V2V、V2I感知结果直接引入车辆运动轨迹规划、线性控制算法中,在车辆视觉感知性能下降的特殊场景中,如:横向车辆切入、十字路口建筑物遮挡、雨雾天气等,实现网联式高级驾驶辅助功能的扩展和增强。
02、单车智能与V2X融合仿真系统介绍
V2X技术和自动驾驶功能的融合,将为自动驾驶车辆提供更多的信息和指导,从而更好地处理周围环境的变化和威胁,提高自动驾驶的安全性。中汽智联基于在智能驾驶及V2X仿真领域的积累,面对行业前沿需求,开发了单车智能与V2X融合协同控制功能研究与验证系统,为单车智能和V2X技术融合后的新应用功能探索提供研究环境和工具。总体来讲,单车智能与V2X融合控制功能仿真验证系统分为硬件在环HIL和实车在环VIL两类。具体包括场景仿真软件、车辆动力学软件、测试管理软件、实时机、V2X测试软件、V2X PC5仿真器、卫星信号模拟器、主车OBU、被测融合功能控制器、上位机、工控机等。系统架构流程图如下所示。
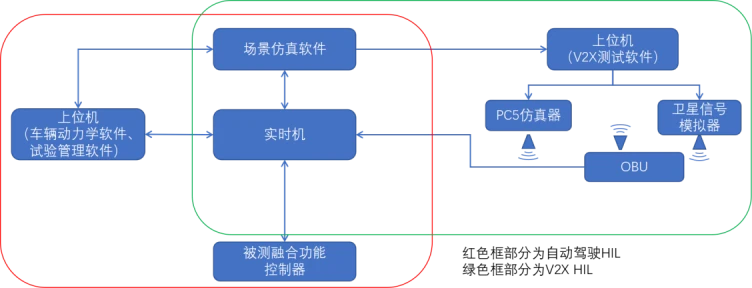
V2X融合功能仿真验证台架是一种融合了自动驾驶HIL系统和V2X HIL 系统的台架,主要用于满足融合功能验证与测试的需求。自动驾驶HIL系统是一个虚拟测试环境,利用场景仿真软件可以为两个系统提供虚拟交通场景,而V2X HIL系统则需要V2X测试软件来提取交通场景信息并按照协议打包,发送给V2X信号模拟器和卫星信号模拟器,OBU将接收到信号通过CAN或者以太网接口发回实时机并传送给被测融合功能控制器。在自动驾驶HIL系统中,动力学模型软件为被控车辆提供车辆动力学模型,并部署到实时机上,而测试管理软件则可以实现将虚拟场景中主车信息、车载视角传感器探测到的其他交通参与者信息发送给融合功能控制器。以单摄像头融合为例,V2X融合功能仿真验证系统还需要配置摄像头传感器模型,摄像头模型的输出数据由场景仿真软件输出到实时机上,并通过视频数据处理板卡输出GSML接口的数据一起发送给融合控制器,同时V2X链路OBU将收到的信息发送给融合功能控制器,实现一路摄像头数据与OBU信息的融合。
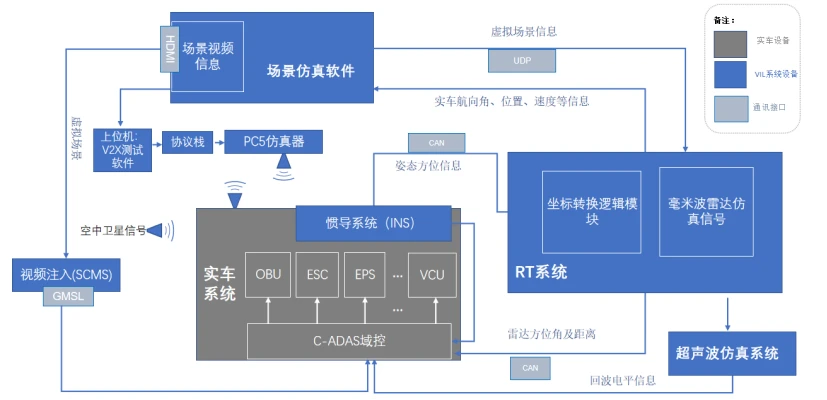
融合功能控制器通过自身车辆状态信息和接收的单车智能传感器信息和OBU信息进行决策并发出控制指令给到动力学模型,输出的结果反馈至场景软件进行显示。在此系统中,通过将场景仿真软件中的场景时间戳加在被发送信号中的方式,来保证验证过程中的两条链路的同步性。其中一路信号将主车位置信息、单车智能传感器探测的信息发送给融合功能控制器;另一路信号通过V2X测试软件提取并发送给PC5仿真器、卫星信号模拟器,OBU将接收的信号在传送至被测融合控制器。以单摄像头融合V2X信号的C-ADAS控制器为例,开展了“单车智能与V2X融合控制功能仿真验证系统VIL级验证尝试。
通过该系统可以开展单车智能与V2X融合协同控制功能研究,对融合场景下对应的功能进行探索验证,并梳理出来相应的功能定义,支持后续融合功能算法技术落地。同时也可以通过该系统进行融合协同控制功能验证。
03、单车智能与V2X融合仿真意义总结
V2X与自动驾驶融合功能仿真测试,将有效验证V2X技术在自动驾驶车辆中的安全性,有助于更好地控制自动驾驶车辆的行为,降低交通事故的发生率,从而实现安全可靠的自动驾驶。V2X与自动驾驶融合功能仿真测试系统具有巨大的市场潜力,为单车智能和V2X技术融合后的新应用功能探索提供研究环境和工具,可以有效改善自动驾驶车辆的安全性和可靠性,使车辆在复杂的道路环境中行驶得更安全。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
