




 广告
广告





















































论文推荐 | 综述:自动驾驶背景下的交通流模型研究

题目:《Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives》
期刊:Transportation Research Part C
发表时间:2021年3月
作者:Haiyang Yu, Rui Jiang, Zhengbing He, Zuduo Zheng, Li Li, Runkun Liu, Xiqun Chen
领域:自动驾驶,交通流模型,综述
推荐指数:*****

1 研究背景和方法
近年来,通过对自动驾驶技术的研究发现:AV具有改善道路安全、节约能源消耗、减少车辆排放、增加道路容量和稳定交通等能力,预示着AV在未来的交通系统中将发挥着至关重要的作用。
论文作者对近年来涉及自动驾驶的交通流模型进行了系统梳理总结,从不同的细节层次考察了基于自动驾驶的驾驶策略设计、交通系统管理以及由此产生的交通动态之间的关系,对现有模型和方法的优缺点进行了批判性的讨论,并提出了未来的研究方向。
2 模型假设
人类驾驶车辆模型
论文作者根据Saifuzzaman and Zheng (2014) 对于影响人类驾驶车辆跟驰行为因素研究,将人类驾驶车辆模型影响因素进行重新排列,详细见表1。
AV模型
AV属于人类驾驶车辆基础上的拟人化,因此AV模型要在人类驾驶车辆模型基础上建模。表4.1中人类驾驶车辆模型因素中的(a)~(d)不适用于AV模型,但仍然适用于尚未开发好的AV;对于成熟的AV,因素(e)和(f)要小得多;因素(g)~(o)与AV相关且更复杂,它们取决于所考虑的AV的类型和所设计的策略;因素(g)-(j)反映了自动驾驶技术的不同复杂程度;因素(k)需要仔细考虑;因素(l)适用于AV,因为发展良好的AV应该具备采用不同驾驶策略来应对周围环境变化的能力。
事实上,大多数跟驰模型(无论是人类驾驶车辆还是AV)都直接描述了外在的“结果”,而不是触及内在的“原因”,以保持模型的简单性。通常假设AV在理想情况下可以与其领先车辆保持较短的距离(间距和/或车头时距)(Diakaki 等, 2015);然而由此产生的间隙和/或车头时距可能受到AV驾驶策略的显著影响(Li等,2018b;Zhao等,2021)。
AV异质性
近年来对人们对自动驾驶车辆性能的研究存在争议,导致了涉及AV的交通建模混乱。论文作者认为对AV建模要遵循以下原则:
1. 根据其自动化水平建模
根据美国交通部国家公路交通安全管理局(NHTSA)采用的SAE国际标准J3016(2018)中自动化水平,将AV分为0~5级;但目前许多涉及自动驾驶的交通建模的论文并没有明确说明所研究的AV的自动化水平。
2. 根据AV的通信能力建模
近年来,许多研究人员使用自适应巡航控制(ACC)和合作自适应巡航控制(CACC)两个术语来表示AV的驾驶策略中是否存在连通性和协调性。根据SAE国际标准J3016(2018)的定义,acc型AV配备了1级驾驶辅助系统,假设能够使用自身的传感器检测车辆周围的环境状况,然后根据检测到的交通信息调整车辆的加减速;配备了CACC的车辆不仅拥有紧邻前方车辆的信息(通过车载传感器),而且还拥有领先车辆或更靠前的车辆的信息,通过车对车(V2V)通信的关键参数,例如位置、速度、加速度(Michael 等, 1998;Van Arem等,2006;Arnaout and Arnaout, 2014)。获得邻近车辆精确位置和速度信息的能力使cac型AV能够协调调整加减速控制,从而导致更顺畅的交通(Wang, 2014;Diakaki等,2015)。
对于ACC型AV,通常假设感知阈值仍然存在,且适用表4.1中因素(h);而对于CACC型AV,则假设感知阈值不存在,因素(h)不适用(Dey 等, 2016)。很少有研究明确考虑ACC型AV的时间或空间预测;而对于CACC型AV,这种预测可能存在,但处理方式往往与人类驾驶车辆考虑的因素有很大不同。
3. 根据AV工作原理和目标建模
AV的目标是实现某种最佳性能,这种性能标准会有所不同。Li和Wang(2007)认为AV驾驶策略的设计者需要在多个目标之间保持平衡,如安全性(Bonnefon 等, 2016),驾驶效率(Li和Wang, 2006;Dresner and Stone, 2008;meng等,2018)和燃料效率(Wang等,2020b)。
以上是AV与人类驾驶车辆建模的不同之处,称之为AV异质性。不同厂家制造的AV可能有不同的性能考虑,不同的AV用户在使用AV时可能会设置个性化的权衡(Zhao 等, 2021),因此AV将有广泛的驾驶需求,然而在目前的交通流研究中,构建涉及AV跟驰模型时很少考虑驾驶需求的异质性问题。
为便于讨论,将论文中涉及的车辆分为三类:人类驾驶车辆(HV)、自动驾驶车辆(AV)和智能网联车辆(CAV)。
3 自动驾驶交通流模型
微观模型
1. 人类驾驶车辆与AV区别
HV和AV模型的分辨率水平不同。AV控制模型时间分辨率水平更小,在[0.1 s, 0.5 s]之内;而微观流模型(如跟驰和换道模型)的时间分辨率水平在[0.5 s, 1 s]以内,可以通过一些控制动作简化和聚合来捕捉主要的交通流动态。如何将这些不同分辨率参数的车辆控制模型和交通流模型整合到一个统一的公式中,是未来有待解决的难点问题。
传统人工驾驶车辆微观模型的输入是车辆运动的理想关键测量值(例如速度、车头时距、间距),输出是连续时间跟驰模型的加速度和离散时间跟驰模型的速度(Treiber和Kesting, 2013b;Laval等,2014;He 等, 2015)。以上模型简化有助于捕捉车辆动力学和交通流动力学的主要特征。
对于AV模型,需要研究自动驾驶的感知-识别-决策-行动循环中的每个组件。虽然输出可以简化为加速度/转向值,类似于人类驾驶车辆交通流微观模型,但输入是来自各种传感器的原始数据(例如激光点云数据,图像/视频数据)。这些原始数据包含更丰富的信息,比人类驾驶员感知要复杂得多。
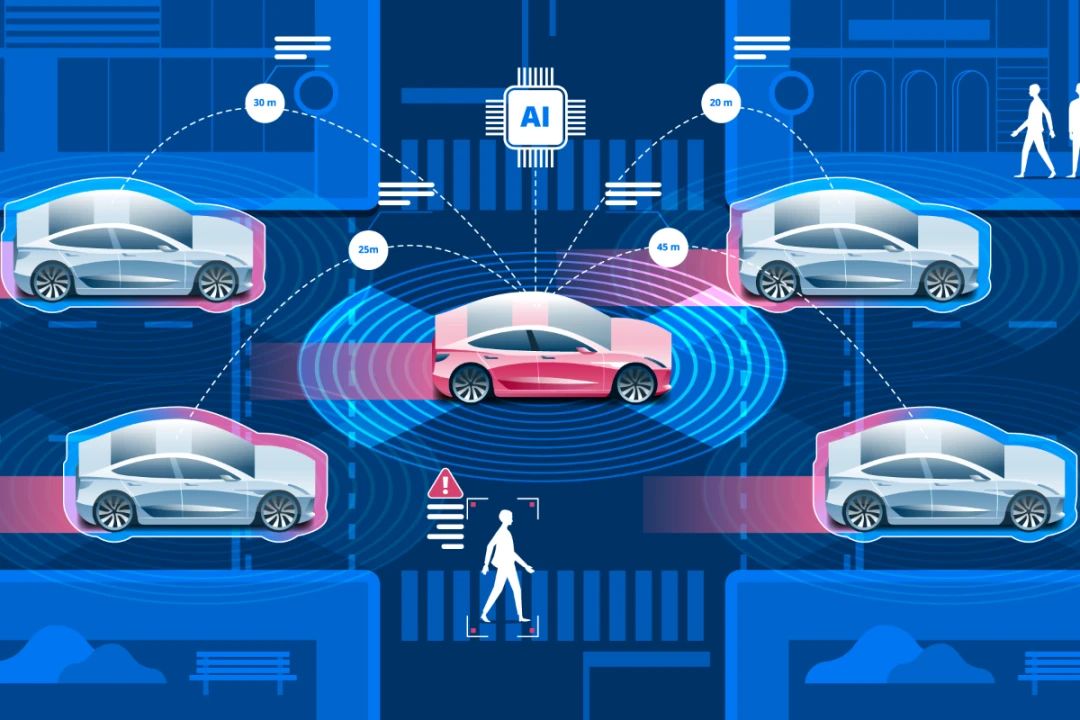
近年来,有学者提出微观交通流中间模型,用于HV交通流研究和AV设计。中间模型输入保持简单,但不过于简单,目的在于保持模型复杂性和模型精度之间的平衡。例如,Wang等(2021)提出的一种输入表示方法。如图1所示,每个交通快照都是一个二维占用网格,反映了被测车辆周围的交通状况。对于车辆占用的单元格,快照值设置为“1”;对于空单元格,快照值设置为“0”。快照的详细级别设置越高,它为AV的决策模型提供的信息就越丰富,输入数据的冗余就越高。通过在模型的准确性和简便性之间进行适当的权衡,可以有效地将时变的局部交通流状态转换为易于由机器学习模型处理的二进制向量。数值试验表明,该公式可用于寻找更好的AV换道策略。
图1:AV决策模型输入的不同细节级别设置的说明
传统HV交通流模型与AV模型差异表现在:前者研究旨在反映人类驾驶员的驾驶特征,而后者研究旨在追求更高的个人或系统驾驶效率。基于这种差异的微观交通流建模方法有:一是有研究人员修改经典的微观模型来描述AV的行为(Calvert和van Arem, 2020),这种做法解决了HV和AV之间的重要差异,并且继承了经典微观模型的一些有价值的特征,这种修改是否合理有待进一步验证。二是有研究人员提出几种新的跟驰/换道模型,用以验证对缓解交通拥堵和避免碰撞的问题的效果。这些新模型专门用于AV,具有与传统微观交通流模型不同的明显特征。
2. 有代表性AV跟驰模型
对AV跟驰模型作以下假设:一是模型具有最佳性能;二是行驶过程中可根据不同驾驶状态采用不同控制策略;三是行驶过程中所有不被模型很好地解释的都视为噪声/扰动。
直接描述驾驶员行为的心理物理-生理模型(Michaels, 1963;安德森和绍尔,2007;van Winsum, 1999)不适合应用于AV,因为AV可以通过车载传感器准确测量其与领先车辆的差距;同样传统的刺激-反应汽车跟驰模型(例如Chandler等(1958)和Gazis等(1961)提出的GHR模型)不被用于AV模型,因为这些模型描述的人类驾驶员的反应与AV的反应有很大不同。
最近有研究人员采用并修改了以下汽车跟驰模型来描述自动驾驶模型,如期望测量模型、安全距离模型、最优速度模型和ACC/CACC控制器模型,下面分别说明这些模型的设计理念。
1)期望测量模型
模型假设车辆的目标是同时达到期望速度和期望车头时距。其中智能驾驶员模型(IDM)是该类模型的代表(Treiber等,2000;Treiber和Kesting, 2013a;2013 b),它的数学定义如下:

上式中,amax为车辆最大加/减速度;v0为期望速度;δ为自由加速度指数,值通常为4;si(t)=△xi-1,i(t)-Li-1为目标车辆i前端与领先车辆i-1后端的间距;Li-1为领先车辆长度;△xi-1,i(t)为t时刻目标车辆i前端与领先车辆i-1位置差;vi(t)为t时刻车辆i的速度;与领先车辆的期望间距(用s*表示)定义为:

上式中,s0为拥挤交通中的最小净距离;T0为领先车辆i-1的一个恒定的期望(安全)时间间隔。
Tapani(2012)和Li等(2017)考虑了ACC型AV的IDM模型,而Schakel等(2010)引入了修改后的IDM来建模CACC型AV,并研究了相关的交通流稳定性问题。他们在方程(1)的自由流动项和相互作用项上应用了最小值为:

其中IDM模型基本图从HV的平滑顶部形状变为AV的三角形形状。
Milan´e´es和Shladover (2014a)研究后指出,尽管IDM模型产生了平滑的汽车跟驰行为,但与ACC型和CACC型AV相比,IDM模型响应更慢、间隙变化更大,IDM模型无法较好描述AV的一些重要特征。Sharma等(2019)将IDM与著名的前景理论集成在一起,描述了可以接收到周围交通准确实时信息的车辆跟驰策略,这些车辆仍由人类驾驶员操作;之后又使用改进的IDM模型模拟混合交通,发现在给定的渗透率下,队列中CAV车辆的空间布置对交通流效率和安全性有显著影响(Sharma 等, 2020)。
其他研究人员提出新模型来讨论如何同时达到AV的期望速度和期望车头时距。以近期提交的三交通阶段ACC (TPACC)模型为代表,该模型用于在三相交通理论框架中描述AV的行为(Kerner, 2016;2018年;2018 b;2019)。TPACC模型假设被试车辆的加速度变化如下:

上式中,K△v为动态系数;K1和K2为正值恒定系数;τp为模型参数;G为同步间隔距离。
TPACC模型是对交通崩溃的重要经验性总结(Kerner, 2016;2018年;2018 b;2019)。研究表明,与传统ACC型AV相比,tpacc模型车辆在道路瓶颈处产生的速度扰动要小得多,从而降低了由HV和AV组成的混合交通流在瓶颈处发生交通崩溃的概率。
2)安全距离和避撞模型
与期望测量模型不同,安全距离模型侧重于与领先车辆保持足够距离,不是相对速度。与其他类型的AV跟驰模型相比,安全距离模型为AV预留较大的间隙(Chang and Lai, 1997;Olia等,2018;Ye和Yamamoto, 2018a)。
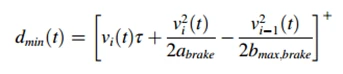
代表性模型有Shalev-Shwartz等(2018)提出新的责任敏感安全(RSS)概念推导AV避碰条件。他建议后车最前端与前车最后方之间的最小安全纵向间隙为:

上式中,[x]+:=max{x,0},表示即使在最坏的情况下,两辆车也不会相撞。例如领先车辆直到完全停车时的刹车最大距离为bmax,brake,其后车辆在反应时间τ内加速度不超过amax,accel,然后至少以减速度amin,brake制动停下来。
Li等(2018b)认为以上模型过于保守,导致领先车辆和被测试车辆之间存在不必要的大差距,特别是在速度较高时(Zhao等,2021)。事实上,在跟车状态下,两辆连续车辆之间的速度应该几乎相同。Li 等(2018b)提出t时刻的安全差距应为:
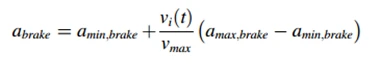
经验观察表明,如果车速较高,人类驾驶员在制动时倾向于采用较大的减速率。因此在高速范围内经验平均车头时距比在低速范围内经验平均车头时距大(Chen 等, 2010a;Li等,2020c)。Li等(2018b)提出制动时的减速度公式为:
现有AV安全距离模型只考虑了AV所需的最小跟车距离,汽车跟驰行为的动态特征,特别是当距离大于该最小距离时,需要作进一步研究。
3)最优速度模型
最优速度(OV)模型最早由Bando等(1995)提出,模型揭示了微观驾驶行为与宏观交通流测量之间的联系。OV模型假设每辆车都有一个OV,该OV依赖于与领先车辆的距离。Bando 等(1995)的原始OV模型将目标车辆i的加速度描述为实际速度vi(t)与OV之间的标度差,表示如下:
上式中,α为敏感系数;V(•)为预先选定的OV函数。
用于AV的新OV模型仍然沿用上面假设,但其通过V2X通信来确定连续几辆车之间的间隙信息(Xie 等, 2008;Ge和Orosz, 2014;Jia and Ngoduy, 2016;王等,2018c;谢等,2019b)。一般形式可以写成如下形式:

上式中,Δxn,i(t)和Δvn,i(t)表示AV与通过V2X通信相互连接的任何其他车辆之间的位置和速度差。
通过适当选择跟驰模型函数f[·],可以充分利用其他车辆的附加位置和速度信息,提高局部交通流的稳定性,平滑激波。例如,Xie等(2008)提出了一个CAV利用线性加权加速度的模型,如下所示:
上式中,βj为正加权系数。公式可以解释为HV对未来时间或后续反应时间的广义跟随距离做出变化的预期,这种预期行为通常会增加交通稳定性。函数f[·]非常灵活,不像传统OV模型中假设的那样与人类驾驶行为密切相关(Li 等, 2020a)。
4)ACC与CACC控制器模型
为解决交通流的整体稳定性,研究人员提出了各种AV控制器,使AV在车辆队列中的领先车辆以理想速度运行(Sun等,2018;Feng等,2019)。从交通流研究的角度看,AV的ACC/CACC控制器可以看作特殊的AV跟驰模型,通常只使用vi-1(t)和vi(t)信息。
下面这个关系式是写在拉普拉斯域的车辆跟驰模型:
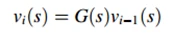
上式中,vi-1(s)和vi(s)分别是vi-1(t)和vi(t)在拉普拉斯域中的拉普拉斯函数;G(s)为传递函数,它描述了vi-1(s)和vi(s)之间的关系。
如果选择:
给定系数k1,…,k5 (Milan´e´es 等, 2014b),我们可以用拉普拉斯逆变换得到vi-1(t)和vi(t)之间的时域关系如下所示:

现场试验表明,这种模型能够保证AV车队的稳定性(Naus 等, 2010;stern等,2018;Navas等, 2019;Gunter等,2020;Qin和Orosz, 2020)。

AV换道模型
由于换道对交通流和道路安全产生负面影响,正引起越来越多的关注(Zheng 等, 2013;Ali等,2020)。相关交通流研究主要解决两个问题,即一是换道决策问题,二是捕捉换道动态并量化对交通流影响的换道实施模型(Zheng, 2014;Xie等,2019b)。
1)换道决策模型
研究者将换道分为强制换道和自主换道(Kesting 等, 2007)。当驾驶员必须离开当前车道才能到达目标车道时,这种换道类型就是强制换道;当驾驶员为了更好的驾驶条件而自愿选择离开当前车道时,这种换道是自由换道。目前很少有公开报告涉及AV的强制换道策略(Cao等,2019)。研究表明,换道、左/右转弯和U型转弯属于最困难的自动驾驶任务,目前大多数自动驾驶车辆还没有为这些任务做好准备(Favaro 等, 2017;Banerjee等,2018;Boggs等,2020a;Boggs等,2020b)。
对于自主换道决策问题,研究者提出不同的HV和AV模型。传统HV换道决策模型基于设计的规则,包括决策树(Gipps, 1986;Moridpour等,2010;Laheman等,2013;Zheng,2014),效用理论(Ahmed, 1999;Toledo等,2005),博弈论(Kita, 1999;Liu等,2007;Talebpour等,2015;Ali 等, 2019b)。最近,基于机器学习的换道决策模型已经被提出用于这两种HV (Xie等,2019a;Nishi等,2019;Zhang 等, 2019c;Xing等,2020;Dong等,2020)和AV (Wolf等,2018;Ni等,2018;Wang等,2018a;Ni等,2020年;Wang 等, 2021)。高速汽车决策模型采用自然驾驶数据对模型参数进行标定。然而,AV的决策模型通常使用仿真数据来寻找最佳的模型参数,从而实现无碰撞和平稳的换道过程。
基于机器学习的决策模型已被证明对AV有用,特别是在拥堵交通中,因为简单的换道决策模型无法满足AV的实际应用。由于深度学习和强化学习的算法复杂性,基于机器学习的决策模型很难解释,未来需要更多研究去克服机器学习决策模型的不易解释等问题。
2)换道实施模型
换道实施模型在过去15年取得了显著改进,主要是因为有详细的数据支持(Li 等, 2020c)。大多数传统模型和仿真软件假设车道变化在瞬间完成,这与经验证据矛盾(Toledo和Zohar, 2007;Wang等,2014;Xie等,2019b;Yang等,2019;Ali等,2020)。虽然证据是针对HV的,但AV的换道实现也可以从这些分析中受益。AV换道模型与人类驾驶车辆换道模型的主要区别在于,前者换道轨迹是可规划和直接控制的,而后者换道轨迹主要依赖于驾驶员。如何规划和优化AV的换道轨迹是驾驶安全、交通流动力学、AV设计和交通仿真研究的关键问题。
AV的换道轨迹规划有两个步骤:第一步是考虑允许什么样的换道轨迹,然后选择一组合适的曲线来规划换道轨迹。Wang等(2014)研究表明,换道轨迹部分可用HV的某个五阶或六阶多项式近似描述。许多AV驾驶策略的设计者也采用多项式来进行AV的换道轨迹规划(Jula 等, 2000;Papadimitriou and Tomizuka, 2003;Yang等,2019;Wang 等, 2021)。
下一个任务是设计一个控制器,使车辆在换道过程中大致跟踪计划轨迹(Funke和Gerders, 2016;Cesari等,2017;Nierson等,2017;Liu等, 2018)。许多研究旨在通过数学规划方法,将AV的这两个轨迹规划步骤合并为一个步骤(Hatipoglu 等, 2003;Dang等,2015;Bai等,2017;Li等,2019a)。
AV换道对交通流的影响受关注程度较少(Ioannou和Stefanovic, 2005;Wang等,2019)。Wang 等(2021)研究表明,如果无法通过V2X通信进行有效的协商,应该谨慎对待机器学习模型对AV换道决策的训练过程,因为对基于强化学习的换道决策模型奖励函数设置不当,会导致竞争策略、自私换道行为、人群无组织状态,从而导致整体交通效率的退化。研究强调了自动驾驶策略的设计者在强调交通安全的同时,还要重视交通效率前提条件。
当V2X通信可用时,协同换道会缩短换道的时间和空间持续时间,并使换道更安全、更高效(Luo 等, 2016;Chen等,2019;Lombard等,2020)。例如,Ali等(2019a)和Ali等(2020)使用基于风险的持续时间方法建模了CAV车辆强制和自主换道对安全和效率的影响,指出连接环境改善了强制和自主换道行为,增强了交通安全。这一新研究问题有待在未来进行进一步研究验证。

中观模型
开发中观交通流模型是为了填补微观模型与宏观模型之间的空白。典型的中观模型包括气体动力学模型、连续气体动力学模型、车头时距分布模型等(van Wageningen-Kessels 等, 2015)。目前还没有针对气体动力学模型和连续气体动力学模型的AV交通问题研究,有研究人员已经采用车头时距分布模型来描述由HV和AV组成的混合交通流。
车头时距指两辆连续车辆通过同一车道横截面时的间隔时间。通常情况下,有许多原因导致人们观察到的车头时距产生右偏分布。车头时距分布不仅反映了人类驾驶员如何跟随其领先车辆,而且还提供了交通动态中HVs不确定性的基本衡量标准(Chen 等, 2010a;Li等,2020c)。因此车头时距分布模型是连接微观和宏观交通流模型的桥梁(Li and Chen, 2017)。
相比之下,较短且相对稳定的车头时距可以提高交通流量能力、稳定性和安全性,大多数AV的目标是在一定速度下与领先车辆保持适当的车头时距(Swaroop 等, 1994;Swaroop和Rajagopal, 2001)。关于AV车头时距分布,需要注意以下几点:
1)研究表明,由于可以利用V2X通信技术接收下游的交通信息,然后提前采取适当的行动,因此可以在CACC型AV队列中设置比ACC型AV更短的期望车头距离(Alam 等, 2015;Bian等,2019)。
2)由于车辆力学和传感器/控制器的限制,车辆车头时距不能任意短(Cho 等, 1996)。Nowakowski 等(2010)和Milan´e´es等(2014b)指出,在理想CACC驾驶条件下,AV排的最小时间间隔(即前车后保险杠与后车前保险杠之间的时间差异)达到0.6 s。然而要注意通信丢包、传感器故障(Semsar-Kazerooni和Ploeg, 2013;Ploeg等,2015)和气象道路条件干扰问题,可以自适应地改变所需的车头时距,以在效率和安全性之间获得权衡(Ploeg等,2015)。
3)不同的AV在相同的速度下可能有不同的期望方向。这种差异是由车辆技术性能受限造成的。大多数现有研究(Nowakowski等,2010;Naus等,2010;Gunter等, 2020ab)仍处于测试的第一阶段,并显示了具有较小车头的AV排的能力,很少有研究全面考虑AV排所需车头的异质性。如何正确描述AV排车头的异质性和变异性及其对交通安全和效率的影响,未来还需要进一步研究。
4)目前对于AV车头时距分布模型研究缺乏大规模的数据支撑,这一研究方向未来需要得到更多的关注。未来迫切需要研究AVs和HVs之间的相互作用,以及这种相互作用对HV在跟随AV时保持的车头方向的影响。
5)目前还没有研究涉及AV的离车速度。出发车头时距是指在信号灯变绿后,连续车辆开始越过信号灯路口停车线时的时间间隔(Jin 等, 2009;Tan等,2013;Hao和Ma, 2017)。出发车头时距的位置变化特征和不确定性对于估计信号交叉口的有效流量很重要(公路通行能力手册,2010)。利用V2X通信技术,AV可以查询准确的信号转换时间,并立即启动,缩短出发时间。现有大多数AV的相关交通流研究都集中在非中断流场景,应该更多地关注中断流场景,因为AV对城市道路交通效率的积极影响具有很大的价值(Li 等, 2014;Guo等,2019)。

宏观模型
现有许多研究在宏观层面调查了AV对交通流的潜在好处。从交通流角度看,AV的好处包括增加容量、提高交通稳定性和提高交通效率。AV的宏观交通流模型预期收益研究总结如下:
1. 通行能力的一维空间效益
微观层面上较短的跟车间隙假设直接导致宏观层面上较大的容量假设(Yokota 等, 1998)。
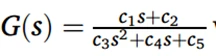
现有在该方向的研究模型有一个共同的祖先,该祖先描述了道路上AV的引入引起基本图的基本变化。Bose和Ioannou(2003)提出了一个简单的车间距模型,模型假设AV在跟随其他车辆时产生恒定的车头时距hconstant。被试车辆i的前沿与先导车辆(i-1)的后端之间的间距如下所示:

上式中假设所有车辆长度L相同。
平均车间距是交通密度的倒数,可以推导出以下100%自动驾驶交通的基本流密度关系。
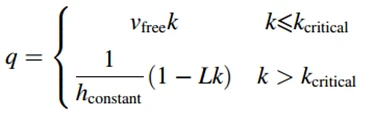
上式中,K为交通流密度,K_critical为达到最大交通流量的临界密度;vfree为自由流速度;式(14)表示三角形基本图,当考虑其他微观跟驰模型时,会得到不同类型的基本图(Tang 等, 2007;Laan和Schonfeld, 2020)。如图2所示,纯AV流量的流密度曲线通常比纯HV流量的流密度曲线具有更大的临界密度和更高的峰值。通常情况下,高速车辆之间的平均车头时距在1.8 s~2s左右,说明高速车辆每车道通行能力在1800~2000辆/小时之间。如果AV之间的平均车头时距保持在1.2 s~1.5 s,则AV每车道的通行能力将在2400 ~ 3000辆/小时之间。
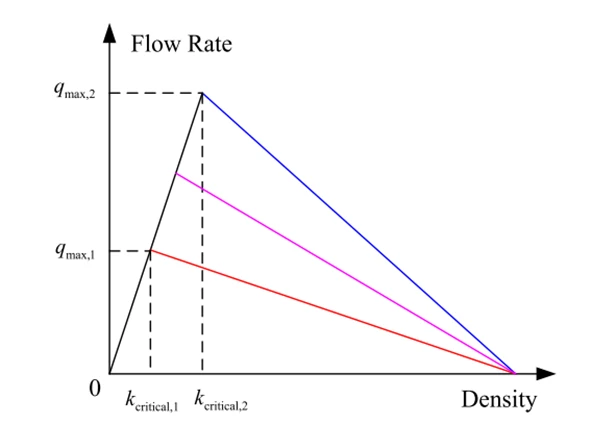
图2.HV交通(红色)、HV和AV混合交通(粉红色)和纯AV交通(蓝色)的流量-密度关系的说明。
一些研究者认为AV在混合交通中行驶时会保持较大的间隙,从而导致交通效率退化(Seo and Asakura, 2017),但更多研究者认为,随着AV在混合交通中渗透率p的增长,交通效率会单调增加(Bose and Ioannou, 2003)。假设交通密度适中,考虑AV在混合交通中的渗透率p,可以直接计算稳态条件下的平均车间距如下:
上式中,SHV表示HV车辆的平均车间距;SAV表示AV车辆的平均车间距。
如图2可证明,同时包含HV和AV的混合交通流密度曲线位于这两条曲线之间,AV的渗透率p越高,对应的流量密度曲线越接近纯AV流量的流量密度曲线。
上述方法强调了理想简化条件下(如车辆长度均匀、驾驶行为异质性可忽略、AV及其控制策略相同)混合交通的平均测度,为进一步研究提供了基础。根据基本模型中引入的新因素,我们对以下简化研究进行分类。
方法的第一个简化是考虑队列中跟随HV的AV车跟车间隙和跟随其他AV的跟车间隙之间的差异。借助V2X通信技术和先进的控制技术,AV的排内跟车间隙将比排间跟车间隙更短(Michael 等, 1998),见图3。(Sharma 等, 2020)研究指出,具有通信能力的车辆在队列中的空间分布可能会对这种通信能力的收益产生重大影响。论证了在一定渗透率下不同车辆在队列中的空间布局的重要性及其对交通流扰动、效率和安全性的影响。一些研究区分AVs的类型(Carbaugh, 1998;Zhao等,2021),根据他们不同的汽车跟踪策略来研究异构AV对交通容量的影响。Chen 等(2017)进一步考虑到,当多车道道路实施各种车道管理策略时,单车道场景中引入的队列参数可能在不同车道之间有所不同。
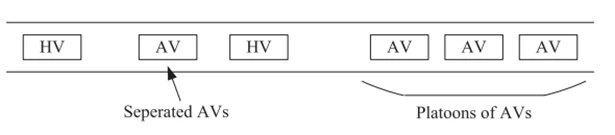
图3 混合交通插图
有研究者提出用模拟方法研究AV对干线和道路网络容量的影响。有研究人员设计特殊多类细胞传输模型(CTM),其中每个CTM对应一个唯一的基本图,多层CTM的混合导致了相对于AV的不同渗透率p的更复杂的流密度图(Levin和Boyles, 2016a;2016 b;Pater等,2016;Qian等,2017;Pan等,2019)。有研究者基于多类CTM,模拟大型网络中AV的高效动态流量分配(Melson等,2018)。Tang 等(2007)开发了具有混合交通专用基本图的高阶交通波模型。
方法的第二个简化是考虑混合交通的随机特征(Zhou and Zhu, 2020),例如针对HVs和AV引入不同的车头时距分布模型(Wang 等, 2014a)。交通流量分布是车头时距的逆分布(倒数的分布),在流密度图上表征测量的散射特征(Chen 等, 2010b;Chen 等, 2014;Li和Chen, 2017),预测AV的穿透速率p越高,流密度图中的不确定性越小,这是经典基本图理论的延伸。Ghiasi等(2017)研究了更详细的混合交通流分类车头时距分布模型,考虑hv - av间隙和av - av间隙之间的差异。Mohajerpoor和Ramezani(2019)使用类似方法,分析了在不同车道分配策略下(a)专用车道、(b)混合混合车道、(c)混合HV车道和(d)混合AV车道时,车流中断的双车道道路总延迟。不同的是,Zheng等(2020)提出一个随机扩散方程描述和分析自动驾驶系统对混合交通不确定性和稳定性的影响。
上述研究都是从交通中观或宏观测度推导道路通行能力。其中许多研究采用基于微观模拟方法研究异质混合交通的道路容量,甚至道路网络容量(VanderWerf 等,2001;Arnaout and Arnaout, 2014;Wang等,2017a;Yang等,2017)。(Mattas 等, 2018;Wang等,2019;Wang 等, 2020b;Li 等, 2020b;Makridis等,2020)采用AV的微观汽车跟踪模型模拟道路和网络中混合交通的动态特征。基于仿真的方法允许我们灵活地纳入许多影响因素,包括异构的HVs和AV、噪声干扰等。
2. 交通流稳定性一维效益
交通稳定性是交通流理论领域的另一个重要问题。随着交通需求增加,HV交通流受到扰动后,很难恢复到平衡状态,导致交通瘫痪的风险增加(Hoogendoorn 等,2014)。
在交通流稳定性分析中,研究者对小扰动感兴趣,因此只需分析线性稳定性(Orosz 等, 2004;Walxun,2008;Wold and Walxun,2011)。当跟驰模型确定后,度量交通流稳定性的方法较多。Sun等(2018)回顾了分析局部稳定性和弦稳定性的主要方法,包括基于特征方程的方法、Lyapunov准则、基于直接传递函数的方法和基于拉普拉斯变换的方法,评估了使用其中一些方法获得稳定性标准的一致性和适用性,讨论了实施CAV稳定性分析的问题和挑战。
本文将涉及AV的交通流稳定性的研究根据研究方法分为四类,具体如下:
(i)建立一个平衡速度-间距函数V(·),将所选的汽车跟驰模型转化为以下等价形式:

上式中,s表示间距。
考虑均匀流动平衡的小扰动,得到上述平衡态的局部线性化形式。该问题转化为一个特殊线性系统的稳定性分析(Sun 等, 2018)。这种方法已在许多研究中使用(Xie 等, 2008;Ge和Orosz, 2014;Jia and Ngoduy, 2016;Wang等,2018c;Zhu和Zhang, 2018;Xie等,2019b),这些研究涉及V2X通信的好处,通过V2X通信可以共享不同空间点的交通流状况信息,进一步提高交通流稳定性。
(ii)将一系列连续车辆视为一个队列,提出宏观交通波模型。分析这种交通波模型的稳定性,这些模型通常以偏微分方程的形式写成(Ngoduy和Jia, 2017;Huang等,2020)。
(iii)车队稳定性分析,着重于扰动在队列中从一辆车到另一辆车的传播。如果扰动在上游传播时受到抑制,这个排是稳定的(Ioannou and Chien, 1993;Dey等,2016;Stüdli等,2017;Li 等, 2018c);否则不稳定。弦稳定性分析对扰动传播引起的间隙误差给出严格边界,在关注行车安全的车辆控制研究中受到广泛认可。Li and Shrivastava (2002), Yi and Horowitz (2006), Sau 等 (2014), Qin and Wang(2018)对AV参与的车队交通流稳定性进行了分析。有研究者进行了现场验证,表明车队稳定性分析是维持稳定交通流的一种强大而实用的方法(Naus 等, 2010;Siten等,2018;Gunter等,2020年;Qin和Orosz, 2020)。包括HVs和AV的混合交通流稳定性最近受到较多关注(Li和Wang, 2017;Gong,Du, 2018;Ghiasi等,2019;Zheng等,2019;Xie等,2019b;Sun 等,2020)。Talebpour和Mahmassani(2016)通过对均匀流动平衡引入一个小扰动,讨论了自动化如何有助于防止冲击波的形成和传播。Ge 等(2018)和Ge and Orosz(2018)在HVs中进行了CAV设计的实验验证,结果表明,CAV可以显著提高混合交通的稳定性、安全性和能效,并可以缓解交通拥堵。Sun等(2020)探索了车队稳定性分析和振荡分析的互补使用,以压缩和缓解CAVs混合交通的交通拥堵,并证明较高的个别车辆稳定性可以缓解队列的振荡严重程度。
(iv)研究AV对交通流稳定性影响。方法侧重于通过对AV进行编程,使其在“慢进”和“快出”过程中做出临时而敏捷的动作,从而吸收拥堵/扰动(Beaty, 1998;Yaobaidi,2013)。该方法可以进一步分为两种类型,第一种是应用计算效率和启发式规则来吸收堵塞(Nishi等,2013;Gogle等,2015;He等, 2017;Nishi, 2020)。Nishi 等(2013)和Taniguchi 等(2015)通过时空交通波分析推导堵塞可以被吸收的条件,并使用Helly的跟驰模型(Helly, 1959)测试了减速的堵塞吸收过程。Ta等(2017)提出一种堵塞吸收策略,使用Newell的车随理论估计振荡(Newell, 2002)。虽然已有的策略在缓解交通拥堵方面表现良好,但在减速过程中可能产生第二波拥堵。由于人类驾驶员的不确定性可能会引发意外的拥堵传播,因此该策略无法吸收混合交通中的HV和AV。未来研究中,需要解决由此产生的第二次波和系统最优策略问题。此外,AV乘员的舒适度是制定堵塞吸收策略的一个重要因素,忽视这一因素可能会导致误导性的结论和高估此类策略的AV效益。由于这些策略还没有在现场测试中评估,因此自动驾驶汽车使用者是否会接受非自然速度变化的策略仍然未知。
第二种方法是在V2X通信支持下进行一维轨迹规划,管理多辆车的长期预期运动。规划的时间范围长,并且车队稳定性条件可以作为规划问题的显式内置约束直接保证。轨迹规划方法还可以缩短间隙,提高交通流密度和流速(Wang 等, 2020a)。理论分析和数值测试表明,可以使用简约/稀疏规划轨迹来快速吸收堵塞(Zhou等, 2017;Ma等,2017;Li等,2018a;Li和Li,2019;Feng等,2020)。这里简约/稀疏轨迹指规划轨迹可以分成若干段,并且只包含少数非零加速度值作为控制变量。这种简约/稀疏轨迹规划方法有助于降低轨迹规划的计算复杂度,使规划算法更易于在实际中实现。
3. 冲突区域交通效率的二维效益
自动驾驶交通的二维效益,如合作换道,引起研究者广泛兴趣。在过去二十年,随着通信和AI技术发展,研究人员开始意识到可以在冲突区域内以更好的方式组织AV运动,优化交通运营效率(Li 等, 2014;Rios-Torres和Malikopoulos, 2017;Montanaro等,2019)。
通常情况下,AV协同驾驶不需要交通信号系统,凸显了AV彻底改变当前交通系统的潜力。AV的二维效益来自两个方面。一是当车辆协同运动得到优化时,可将这些车辆在不同方向上的间隙缩短到最小,提高交通密度和流量(Chen and Englund, 2016;Xu等,2018;Xu等,2019;Huot等,2020)。二是可以控制和优化进入冲突区的车辆顺序,充分利用有限的道路资源(Li and Wang, 2006;Dresner and Stone, 2008;Gula等,2014;Rios-Torres和Malikopoulos, 2017)。协作车辆控制的关键技巧是安排适当的顺序通过冲突区域(Li 等, 2014;Meng等,2018;Guo等,2019)。以上AV效益会减少车辆行驶时间,减少拥堵的时空演变,减少故障发生的机会。
确定AV冲突区域的通过顺序有多种方法。第一种方法遵循先到先得(FCFS)预订规则。每次重新安排时,所有AV会估计他们到达核心冲突区域的时间,然后发送预订请求。所有预订请求将被接收,传递顺序将主要使用预计到达时间的升序进行安排。此外,只有同一车道上的所有车辆都接受某一车辆的请求后,该车辆的请求才会被处理,防止出现僵局(Li 等, 2013;Chai等,2018;He 等, 2018;Wu等,2019;Medina等,2020)。基于fcfs的方法计算量低,但有时得不到系统最优解(Levin 等, 2016;Meng等,2018)。
第二种方法采用数学规划方法求解AV最佳通过顺序。通常引入几个整数指标值,标记冲突区域内任意两辆车的相对顺序,即确定哪一辆先通过,哪一辆后通过(Zhu and Ukkusuri, 2015;Fayazi和Vahidi, 2018;Lu等,2019;Huot等,2020)。当车辆数量较大(20辆以上)时,所产生的混合整数规划问题难以解决,阻碍了其在实际中应用。
第三种方法将AV的传递顺序编码为一串符号,将规划问题转化为树搜索问题。首先用字符串“ABCD”表示A、B、C、D车辆依次进入冲突区域,然后用不同表示方法,将车辆所有可能的通过顺序构造一个解,将其表示为树状(Li 等, 2014;Meng等,2018)。Xu等(2020)提出一种特殊的树制定方法,使蒙特卡罗树搜索(MCTS)技术轻松应用于快速寻求满意的解决方案。在根节点中,传递顺序首先设置为空,然后第二层根节点的每个直接子节点指向一个索引符号,该索引符号以特定通过顺序指示第一辆车。第三层节点以特定的通过顺序指示前两辆车。通过展开它们的子节点,所有可能的传递顺序都可以生成为解树底层的叶节点。测试结果表明,FCFS规则和分组策略(即将几辆车分组成一个小队列以降低规划复杂性(Xu 等, 2019))可以与MCTS技术相结合,在非常短的时间窗口内找到足够好的通过顺序,因为只需要探索解决树的有限数量的分支(Xu 等, 2020a;Xu等,2020b)。
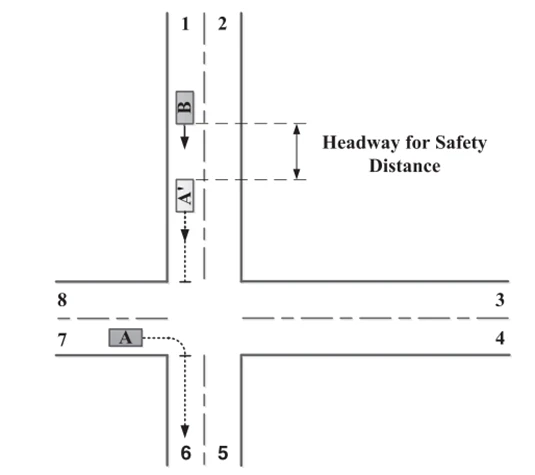
确定车辆通过顺序后,有两种方法依次计算车辆的详细运动控制。第一种方法是使用安全距离跟驰模型计算速度变化过程。每辆车加速过程保持尽可能简单。例如,假设在核心冲突区域内车辆的速度保持不变(Li and Wang, 2006;Dresner and Stone, 2008;He 等, 2018;Meng等,2018),一种处理车道合并的技巧是虚拟映射技术(如图4),假设冲突车辆将在目标车辆之前进入冲突区域,成为新的领先车辆,将(前导车辆的)虚拟车辆映射到后面车辆的目标车道上,让后面的车辆使用汽车跟驰模型来跟踪这个虚拟车辆,避免碰撞。利用虚拟映射技术,将以上场景转换为一维汽车跟驰场景,应用合适的汽车跟驰模型获得正确的轨迹(Uno 等, 1999;Banko等,2000年;Lu等,2000;Li和Wang, 2006)。
图4 虚拟映射技术的说明
第二种方法是应用复杂轨迹规划方法,在进入核心冲突区域之前确定车辆的详细轨迹(Nilsson 等, 2016;Zhang和Kasangdla,2019b)。如果目标仅为减少车辆延误和畅通交通流,那么这种轨迹规划方法不可取;如果目标是降低燃料消耗和其他相关问题,则应考虑这种轨迹规划方法(Cassandras, 2017;Zhang和Kasangdla,2019b)。
现有的冲突区域合作驾驶研究大多假设参与车辆均为AV,研究人员对建立AV与冲突地区的HV合作新策略表现出更大兴趣(Zhao等,2018;Tilg等,2018;Ding等,2020;Yang和Oguchi, 2020)。也有研究讨论了HVs和AVs协同驾驶的交通信号系统共存和协同优化问题(Yang 等, 2016;Guo等,2019;Niroumand等,2020)。
综上所述,AV流量二维效益研究范式与AV流量一维效益研究范式存在较大差异。交通稳定性是传统交通流研究的一个重要课题,但本文并不是主要的研究主题,因为AV交通二维效益的研究假设每辆车的运动都是很好的规划的,交通流的稳定性可以作为规划问题的一个内置约束保持。除了驾驶安全和效率,一些研究还涉及了生态驾驶(Cassandras, 2017;Zhang and Cassandras, 2019a;Wang等,2020d)和其他传统交通流研究中没有突出的问题。道路网络中的合作驾驶研究也很新颖(Li 等, 2014)。以上这些问题在未来需要进一步深入研究。

4 结束语
随着AV出现,交通流建模与车辆研究的耦合变得不可避免。车辆研究强调单个或组合车辆的运动,由此产生的交通流动力学应从系统的角度考虑。
交通流研究人员和车辆研究人员可以相互交流协作,实现共同受益。一方面,前者向后者学习,了解AV的机械特性和控制器设计,定位HV和AV差异,可以更好地分析、建模和预测AV对交通流动态的影响,最终制定有效的策略,使AV在道路安全、交通效率、燃油消耗等方面的效益最大化;另一方面,前者可以帮助后者,在设计AV时,除了单个车辆性能外,还应充分考虑最终AV与其他道路用户的交互以及对交通系统的影响。例如,应适当设计AV的决策/控制策略,以保证安全,增加运输系统的容量,减少交通流的不稳定性。
在过去十多年里,交通流研究人员对于AV对交通流的影响建模产生较大兴趣,车辆研究人员对AV的设计和控制产生了较大兴趣,并在各个领域分别取得了重大进展。但交通流研究和车辆研究之间的耦合合作研究并不紧密。
本文系统全面地回顾现有的涉及自动驾驶的交通流模型,动机主要有三个:一是批判性地综合这一重要而紧迫课题的已有知识,二是梳理存在的问题,用于未来研究需要;三是唤醒交通流研究人员和车辆设计研究人员之间的研究合作,将AV模型集成到混合交通流模型中。本文认为交通流和车辆两个方向的研究人员未来应更多关注以下问题。
1. 为捕捉与AV有关的交通的一些关键特征,所有现有的AV交通流模型被大大简化,模型不能解释人类驾驶员在AV出现时的行为。一方面,由于各种自动化级别AV的行为复杂,当HV与AV混行控制时更是如此(Michon, 1985;Endsley, 1999;Fuller, 2005;Li等,2012;Wang等,2020c);另一方面,人类驾驶员会不断学习如何应对在同一条道路上运行的其他AV,对于HV与相邻AV的差距随时间变化的研究目前很少。AV本质上与HV驾驶方式并不完全相同,即使在技术上将AV训练成与HV高度相似的驾驶方式,当HV与AV混合在一起时,AV的存在会改变HV工作方式。研究人员发现,通过使用Waymo收集的数据,当人类司机跟随Waymo无人驾驶汽车时,他/她往往会变得更具攻击性(Hu 等, 2021)。研究人员发现,自动化程度不同的AV的驾驶行为有显著差异(Michon, 1985;Endsley, 1999;Li 等, 2012)。常用的ACC和CACC划分标准不足以反映这种差异。建立合适的模型捕捉自动化能力的光谱,了解AV与HV的相互作用,特别是对人类驾驶员认知过程和其他人为因素的影响是未来特别是过渡时期的一个重要研究方向。
2. 现有HVs和AV微观模型大多依赖于传统建模技术,参数数量有限,过于简单(Li 等, 2016a)。由于不同类型车辆之间相互作用的复杂性增加,目前的AV驾驶系统依赖人工智能算法。人工智能技术在处理大量参数方面具有巨大能力,未来当真实的AV数据更加丰富时,交通流界需要更积极地探索通过与人工智能技术耦合来改进现有交通流模型,或者进行纯粹基于人工智能的新交通流模型的可行性研究(Wang 等, 2018b)。
3. 目前对交通流研究基于经验交通测量(Li 等, 2020c)。由于缺乏真实测试数据,无法校准参数,也无法验证涉及自动驾驶的交通流模型的正确性。有研究人员在这方面已经进行了一些尝试(Naus等,2010;James等,2019年;Gunter等,2020年;Qin和Orosz, 2020)。
车队列稳定性测试是最受关注的问题(Rajamani 等, 2000;Rajamani和Shladover, 2001;Gunter等, 2020ab),测试对象是ACC和CACC的操作和通信。有研究表明,基于恒定时间前移的ACC策略可以使车队列稳定(Swaroop 等, 1994;Rajamani和Zhu, 2002),CACC策略更容易使车队列稳定(Naus等,2010)。
现场测试中引入提高交通效率的驾驶策略。Sterna 等(2018)设置了20多辆车在260米的环形轨道上运行,由于人类驾驶员的驾驶能力不完善,出现了交通振荡。研究人员通过设计的反馈控制器激活AV增强,并证明了振荡的耗散。然而由于在实践中情况与测试并不完全相同,自动驾驶系统在实际道路环境中的稳定性并不十分清楚。
4. 预计未来HV和AV将在相对较长的时间内共存共享道路资源,混合交通流和交通基础设施管理之间的相互作用需要仔细考虑。目前这一研究方向已经获得一些基本结论(Ye and Yamamoto, 2018a;Mohajerpoor和Ramezani, 2019;Amirgholy等,2020),需要更多的讨论去理解这一问题复杂性,提高设计最优运输管理系统的能力,适应HVs和AV混合交通流的需求。
5. 有些课题研究的假设过于理想化,需要进行更多研究适应实际需要。例如,在车辆合作运动研究中,常见假设是100%AV,目前很少有研究考虑行人或骑自行车的人,这与实际不符,未来研究中作假设时应更加贴近实际需要。
以上列出的研究问题都是相互关联的,表明未来研究需要交通流界、车辆工程界和其他相关学科的研究人员进行密切合作,采取科学方法解决这些问题。最后说明一下,本文的研究重点是交通流建模和AV的影响,因此有许多主题没有涵盖。
译者简介:
郭海兵,研究生毕业于青岛理工大学,目前就职于青岛一民办高校,希望通过文献翻译加强国内外交通领域前沿内容学习,提升学术研究能力。
终审:一豪



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
