




 广告
广告





















































法规标准-E-NCAP评测标准解析(2023版)


作者:王文林 | 奇瑞自动驾驶产品经理
本文获作者授权
文章目录
什么是E-NCAP?
E-NCAP 评测标准
E-NCAP评测维度
四大维度的权重占比
四大维度的评测场景及对应分数
评星标准
自动驾驶相关评测场景
评测方法及评测标准——VRU
评测内容(测什么)
评测方法(怎么测)
评分标准(怎么打分)
各场景的详细解析——VRU
CPFA—50(Car-to-Pedestrian Farside Adult 50%)
CPNA-25&75(Car-to-Pedestrian Nearside Adult)
CPNCO-50(Car-to-Pedestrian Nearside Child Obstructed)
CPLA-50(Car-to-Pedestrian Longitudinal Adult)
CPTA-50(Car-to-Pedestrian Turning Adult)
CPRA/C(Car-to-Pedestrian Reverse Adult/Child)
CBFA-50(Car-to-Bicyclist Farside Adult)
CBNA-50(Car-to-Bicyclist Nearside Adult)
CBNAO-50(Car-to-Bicyclist Nearside Adult Obstructed)
CBLA(Car-to-Bicyclist Longitudinal Adult)
CBTA(Car-to-Bicyclist Turning Adult)
CBDA(Car-to-Bicyclist Dooring)
CMRS(Car-to-Motorcyclist Rear stationary)
CMRB(Car-to-Motorcyclist Rear braking)
CMFtap(Car-to-Motorcyclist Front turn across path)
CMoncoming(Car-to-Motorcyclist oncoming)
CMovertaking(Car-to-Motorcyclist overtaking)
评测方法及评测标准——SA
评测内容(测什么)
评测方法(怎么测)
评分标准(怎么打分)
各场景的详细解析——SA
CCRs(Car-to-Car Rear stationary)
CCRm(Car-to-Car Rear moving)
CCRb(Car-to-Car Rear braking)
CCFtap(Car-to-Car Front turn-across-path)
CCCscp(Car-to-car Crossing Straight Crossing Path)
CCFho(Car-to-Car Front Head-On)
FCW—HMI
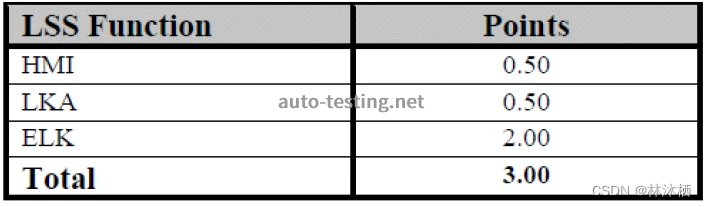
LSS—HMI
LSS—LKA
LSS—ELK
SA(Speed Assist)—Basic SLIF
SA(Speed Assist)—Conditional Speed Limits
SA(Speed Assist)—Road Features
SA(Speed Assist)—Local Hazards
SA(Speed Assist)—System Updates
SA(Speed Assist)—SLF(Speed Limitation Function)
SA(Speed Assist)—ISL(Intelligent Speed Limiter)
SA(Speed Assist)—iACC(Intelligent Adaptive Cruise Control)
什么是E-NCAP?
E-NCAP名为欧洲新车安全评鉴协会,是专门针对量产车型的安全性进行评测的机构。
每辆新车上市前(出口欧洲),都会经过E-NCAP的测评,并且其最终的得分将反映这辆车型的整体安全性能。此外,欧洲市场也会对E-NCAP得分存在一定的要求,不满足的话是无法进入市场的,因此新车在开发过程中会对E-NCAP评测标准进行评估,来满足欧洲市场的需求。
E-NCAP 评测标准
E-NCAP评测维度
-成人乘员保护
-儿童乘员保护
-弱势道路使用者(VRU)保护
-安全辅助(SA)
四大维度的权重占比
维度2020-20222023-2024成人乘员保护40%40%儿童乘员保护20%20%弱势道路使用者(VRU)保护20%20%安全辅助(SA)20%20%
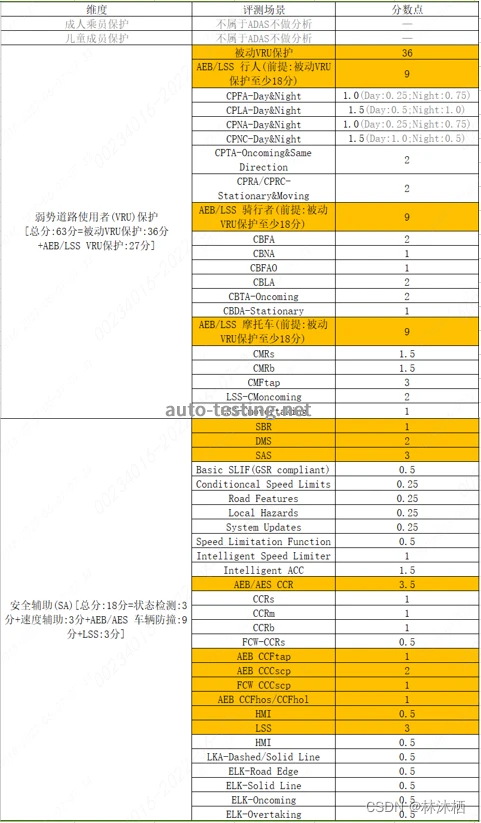
四大维度的评测场景及对应分数
由于成人乘员保护和儿童乘员保护中无自动驾驶相关功能测评,此处不做分析,仅对道路使用者(VRU)保护及安全辅助(SA)作拆分;
评星标准
上面介绍了评分场景,其中分数为标准分数,当实际测评中,会将最终的实际分数与标准分数作比较,通过对照下表,可得出对应星级。例如:安全辅助(SA)总分为18分,若想拿到5星标准,我必须拿到18*70%=12.6分的实测分数。
2023-2024成人乘员儿童乘员弱势道路使用者安全辅助5星80%80%70%70%4星70%70%60%60%3星60%60%50%50%2星50%50%40%40%1星40%40%30%30%
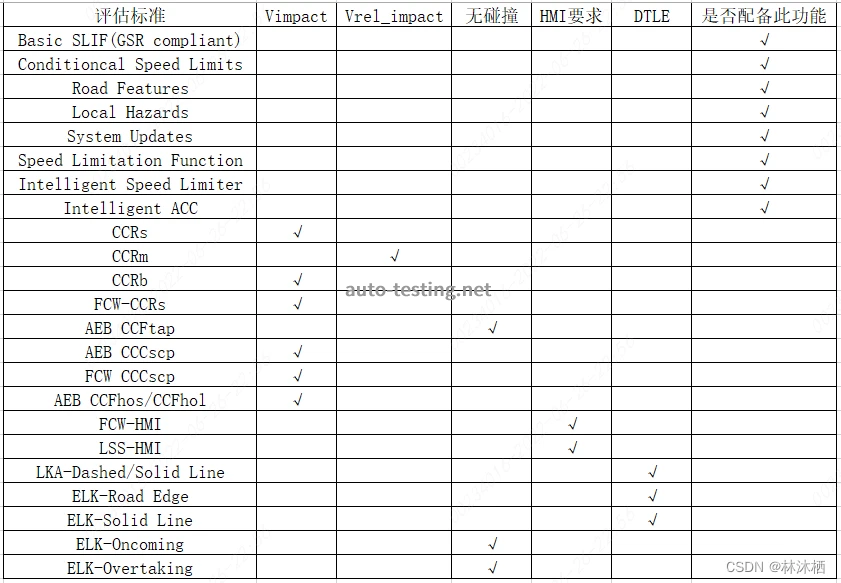
自动驾驶相关评测场景
上面提到成人乘员保护和儿童乘员保护中无自动驾驶相关功能评测,弱势道路使用者(VRU)保护和安全辅助(SA)中是有的,但不都是跟自动驾驶有关的场景,所以此处更一步精简场景,将只跟自动驾驶有关的功能评测场景拆解出来,我们可以看到VRU总分是63分,跟自动驾驶有关的只有27分;SA总分18分,跟自动驾驶有关的只有15分。
评测方法及评测标准——VRU
上面我们已经把跟自动驾驶有关的场景梳理出来了,在详细解析每个场景之前,我们首先要明确,我们拿到这些场景之后,需要测什么以及怎么测还有就是测出来之后怎么打分?
评测内容(测什么)
下图为每个场景的测试标准,我们将通过测试相应的标准来衡量被测车辆对每个场景的处理能力:
评测方法(怎么测)
上面我们知道了,每个场景需要测哪些东西,但是如何测,我们还不明确,下面我们将对应的测试方法简要列一下:
- 车对行人场景(Car-to-Pedestrian Scenarios)
- 车对骑行者场景(Car-to-Bicyclist Scenarios)
- 车对摩托车场景(Car-to-Motorcyclist Scenarios)

评分标准(怎么打分)
Vimpact:当前测试车辆前端或者后端轮廓线与目标虚拟盒重合时的速度,也就是碰撞速度
我们测出Vimpact后,需要根据以下原则来计算出对应的分数:
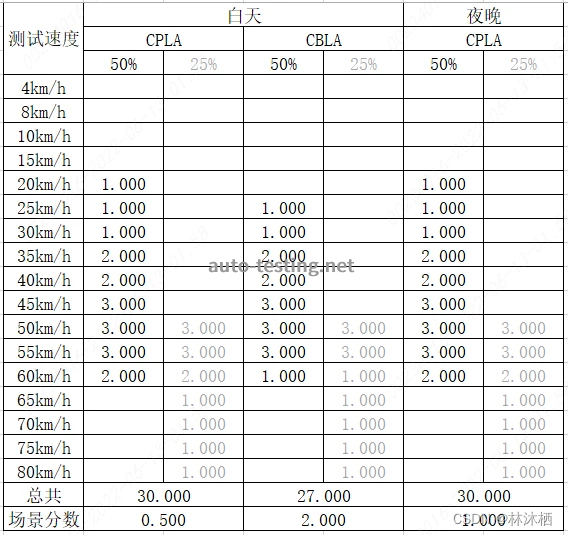
图中对每个测试速度下的Vimpact都进行了说明,我们将我们测得的实际Vimpact与上图对照,便可得到其对应的颜色。不同的颜色,其对应的比例是不一样的,具体如下:
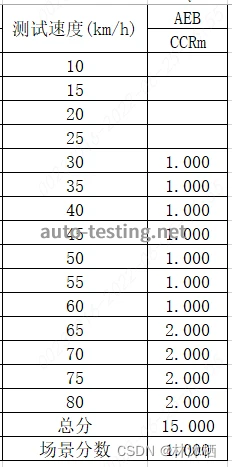
对照上表,我们就可以知道每个测试速度下,对应的比例了,拿到比例有什么用呢?其实每个测试速度下,都会有一个标准的分数,我们拿到比例后,乘以对应的分数,就是我们得到的在对应测试速度下的实际分数,各测试速度下的标准分数如下:

这样经过计算,我们得到了对应测试速度下的实测分数,然后我们将每个测试速度下的分数想加计算总和,跟标准的总分相比较,例如:我CPFA场景最终算出来在10-60的测试区间内,我总共得了18分,我们从上表可以看到CPFA的标准总分是20分,这相当于我们拿到了90%的分数,这时候我们拿90%乘以CPFA的场景分数0.250,最后得到0.225分,也就是CPFA场景,我们拿到0.225分的成绩
Vrel_impact:被测车辆撞击目标时的相对速度
Vrel_impact的评分计算和Vimpact是一样的,首先判断出每个测试速度下对应的颜色

之后根据颜色,判断每个测试速度下的相应比例:
然后根据比例,计算每个测试速度下,实际的分数:
最后计算总分,算出得分比,乘以场景分数,得到最终的实测场景分数
- Pass/Fail
不同场景下,对Pass和Fail的定义不同:
CBTA/CMFtap:被测车辆不得进入目标EBTa或EMT的路径
CPTA:在与EPT碰撞之前,碰撞车辆速度为0即可
CPRA-s/CPRC-s:每个测试速度都必须避免所有3种重叠才算通过
通过以上场景对Pass/Fail的定义,我们可以对照下表,判断各测试速度下,是否可以拿到对应的分数
然后计算总分,算出得分比,乘以场景分数,得到最终的实测场景分数
- FCW的碰撞时间TTC:当TTC≥1.7s发出警报时,可获取分数;或者TTC<1.7s时,制造商能够证明ESS可以避免碰撞
可使用测得的TTC判断是否能够获取对应测试速度下的分数

然后计算总分,算出得分比,乘以场景分数,得到最终的实测场景分数
综合时间
当TTC≥2.3s时,提供视觉信息
当TTC≥1.7s时,提供视觉和(听觉或触觉)警告
当1.7s≥TTC≥-0.4s时,车门保持系统被激活
当存在威胁时,是否对应侧的所有车门均发出有效警告或保持功能
此外需要在前侧窗的视野内提供视觉信息
如果系统在存在威胁的一侧的所有车门上发出有效的警告或保持功能,将获得“所有其他侧门”分数
无碰撞
CMoncoming/CMovertaking:在试验期间的任何时候,VUT都不允许接触超车或迎面而来的摩托车目标。每个场景的可用分数是基于通过/不通过的基础授予的,其中每个场景的所有横向速度和测试速度组合都需要通过才能得分。
各场景的详细解析——VRU
CPFA—50(Car-to-Pedestrian Farside Adult 50%)
测试场景图示:

测试场景描述:
车辆向前驶向从远侧穿过其路径的成人行人,并且在未施加制动作用时,车辆前部结构以车辆宽度的50%撞击行人的碰撞。
测试内容
白天状态下(夜晚要有路灯且开启近光灯),目标行人从距车辆中心6m处开始加速,经过1.5m加速至8km/h,此时车辆以速度10-60km/h[步长为5km/h]速度行驶,与行人在50%处发生碰撞,测试当时的碰撞速度Vimpact
CPNA-25&75(Car-to-Pedestrian Nearside Adult)
测试场景图示:
测试场景描述:
车辆向前驶向从近侧穿过其路径的成人行人,并且在未施加制动作用时,车辆前部结构以车辆宽度的25%&75%撞击行人的碰撞
测试内容
白天状态下(夜晚要有路灯且开启近光灯),目标行人从距车辆中心4m处开始加速,经过1m加速至5km/h,此时车辆以速度10-60km/h[步长为5km/h]速度行驶,与行人在25%&75%处发生碰撞,测试当时的碰撞速度Vimpact
CPNCO-50(Car-to-Pedestrian Nearside Child Obstructed)
测试场景图示:

测试场景描述:
车辆向前行驶与从近侧障碍物后面穿过其路径的儿童行人发生碰撞,在没有施加制动作用的情况下,车辆前部结构以车辆宽度的50%撞击行人。
测试内容
白天状态下(夜晚要有路灯且开启近光灯),目标儿童从前方障碍物后面距车辆中心4m处开始加速,经过1m加速至5km/h,此时车辆以速度10-60km/h[步长为5km/h]速度行驶,与行人在50%处发生碰撞,测试当时的碰撞速度Vimpact
CPLA-50(Car-to-Pedestrian Longitudinal Adult)
测试场景图示:
测试场景(AEB)描述:
车辆朝着在车辆前方以相同方向行走的成人行人前进,在没有施加制动作用的情况下,车辆以车辆宽度的50%撞击行人。
测试内容
白天状态下(夜晚要有路灯且开启近光灯),车辆前方有目标行人以相同方向行走,行人经过1m加速至5km/h,之后再行走10m后,此时车辆以速度20-60km/h[步长为5km/h]速度行驶靠近,与行人在50%处发生碰撞,测试当时的相对碰撞速度Vrel_impact
测试场景(FCW/ESS)描述:
车辆朝着在车辆前方以相同方向行走的成人行人前进,在没有施加制动作用的情况下,车辆以车辆宽度的25%撞击行人。
测试内容
白天状态下(夜晚要有路灯且开启近光灯),车辆前方有目标行人以相同方向行走,行人经过1m加速至5km/h,之后再行走10m后,此时车辆以速度50-80km/h[步长为5km/h]速度行驶靠近,与行人在25%处发生碰撞,测试当时FCW的碰撞时间TTC
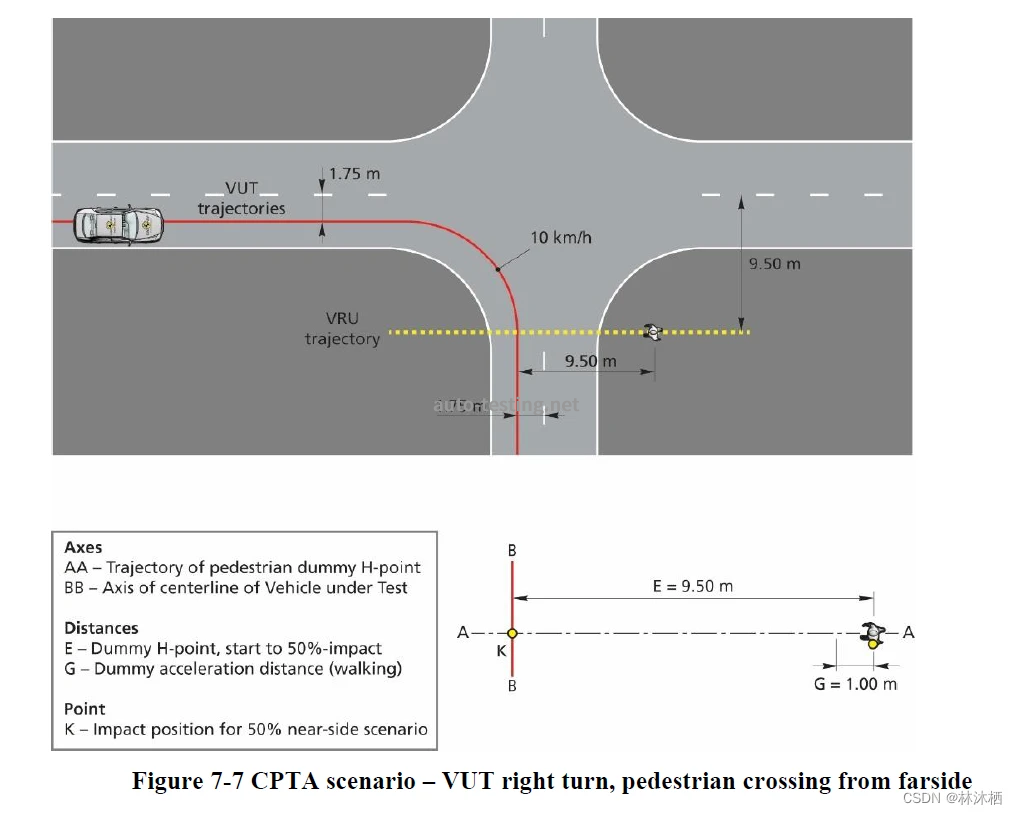
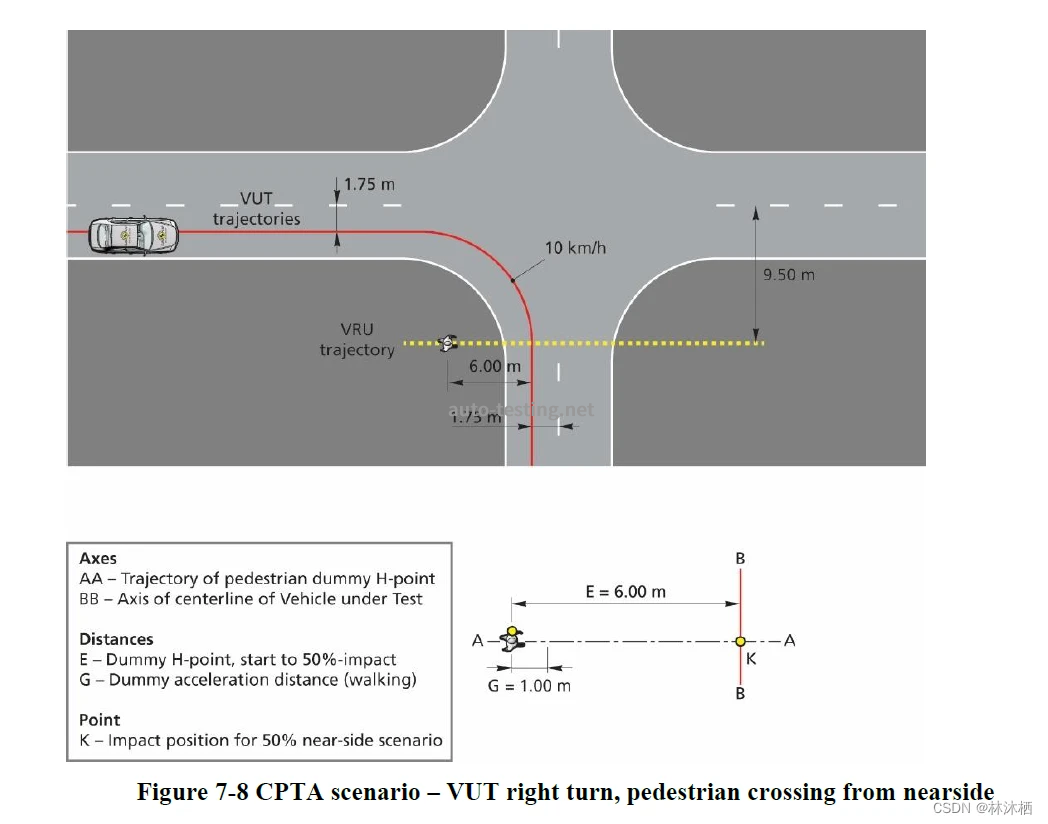
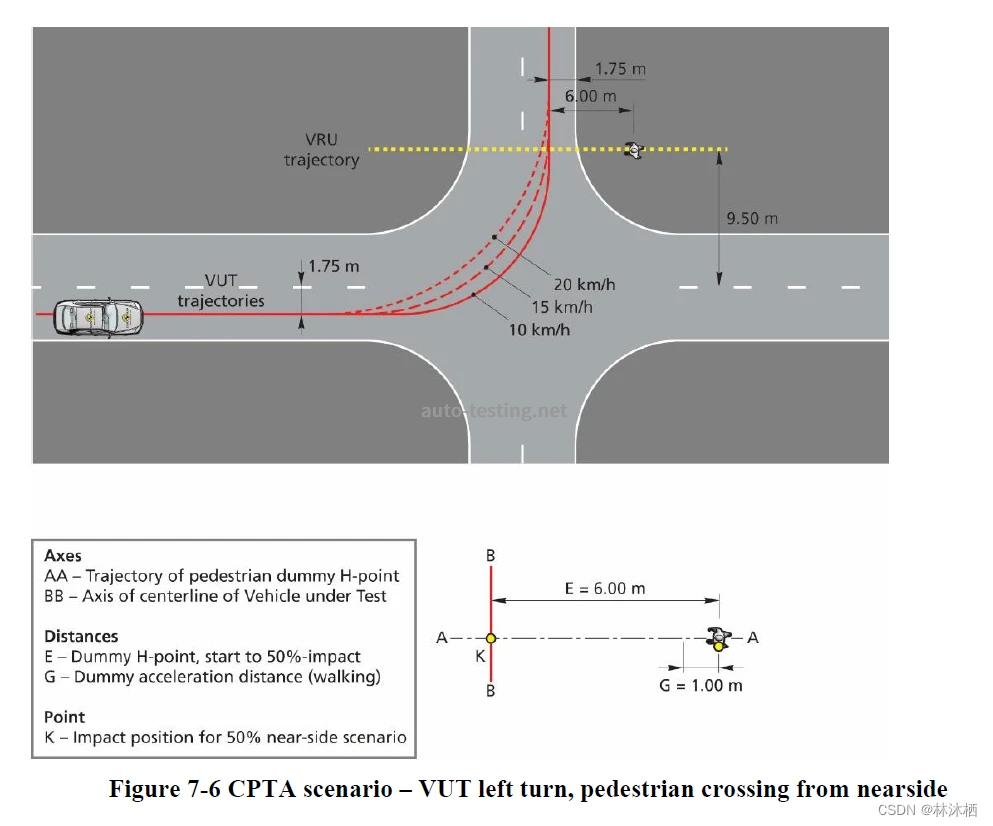
CPTA-50(Car-to-Pedestrian Turning Adult)
测试场景图示1:
测试场景描述:
车辆转向穿过穿过交叉口,与经过其路径的成人行人(与VUT转向前的方向相同)发生碰撞,且在未施加制动作用时,车辆前部结构以车辆宽度的50%撞击行人。
测试内容
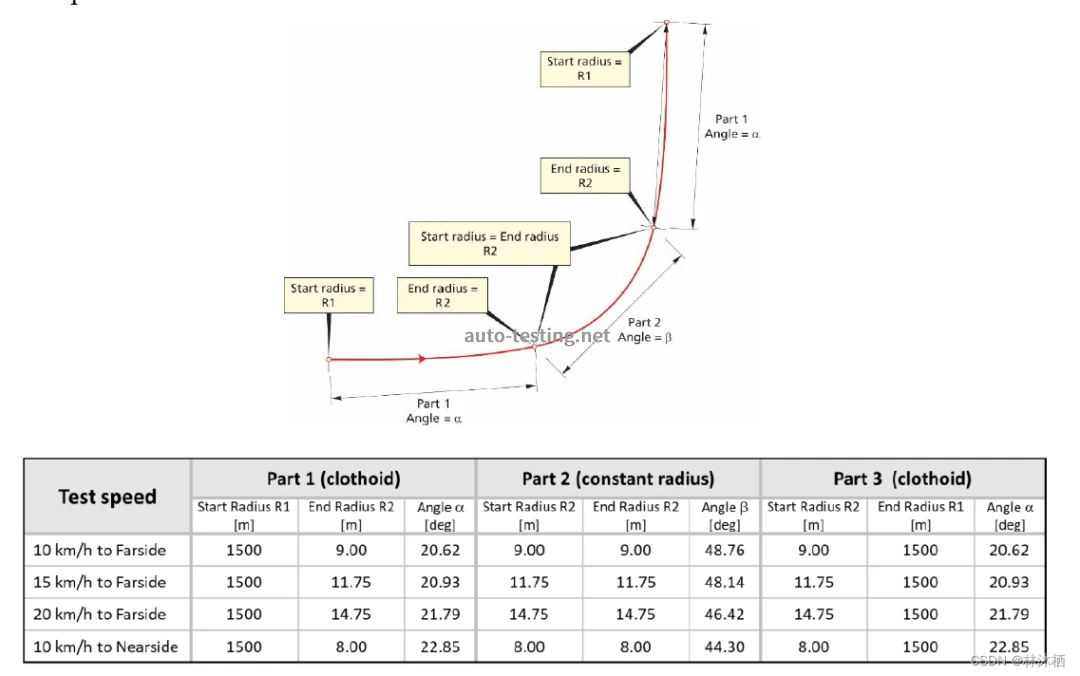
白天状态下,车辆远侧有目标行人以相同方向行走,行人经过1m加速至5km/h,之后再行走8.5m后,此时车辆以速度10-20km/h[步长为5km/h]速度穿过交叉路口,与行人在50%处发生碰撞,测试当时的碰撞速度Vimpact是否为0km/h
测试场景图示2:
测试场景描述:
车辆转向穿过穿过交叉口,与经过其路径的成人行人(与VUT转向前的方向相反)发生碰撞,且在未施加制动作用时,车辆前部结构以车辆宽度的50%撞击行人。
测试内容
白天状态下,车辆远侧有目标行人以相反方向行走,行人经过1m加速至5km/h,之后再行走5m后,此时车辆以速度10-20km/h[步长为5km/h]速度穿过交叉路口,与行人在50%处发生碰撞,测试当时的碰撞速度Vimpact是否为0km/h
测试场景图示3:
测试场景描述:
车辆转向穿过穿过交叉口,与经过其路径的成人行人(与VUT转向前的方向相反)发生碰撞,且在未施加制动作用时,车辆前部结构以车辆宽度的50%撞击行人。
测试内容
白天状态下,车辆近侧有目标行人以相反方向行走,行人经过1m加速至5km/h,之后再行走8.5m后,此时车辆以速度10km/h速度穿过交叉路口,与行人在50%处发生碰撞,测试当时的碰撞速度Vimpact是否为0km/h
测试场景图示4:
测试场景描述:
车辆转向穿过穿过交叉口,与经过其路径的成人行人(与VUT转向前的方向相同)发生碰撞,且在未施加制动作用时,车辆前部结构以车辆宽度的50%撞击行人。
测试内容
白天状态下,车辆近侧有目标行人以相同方向行走,行人经过1m加速至5km/h,之后再行走5m后,此时车辆以速度10km/h速度穿过交叉路口,与行人在50%处发生碰撞,测试当时的碰撞速度Vimpact是否为0km/h
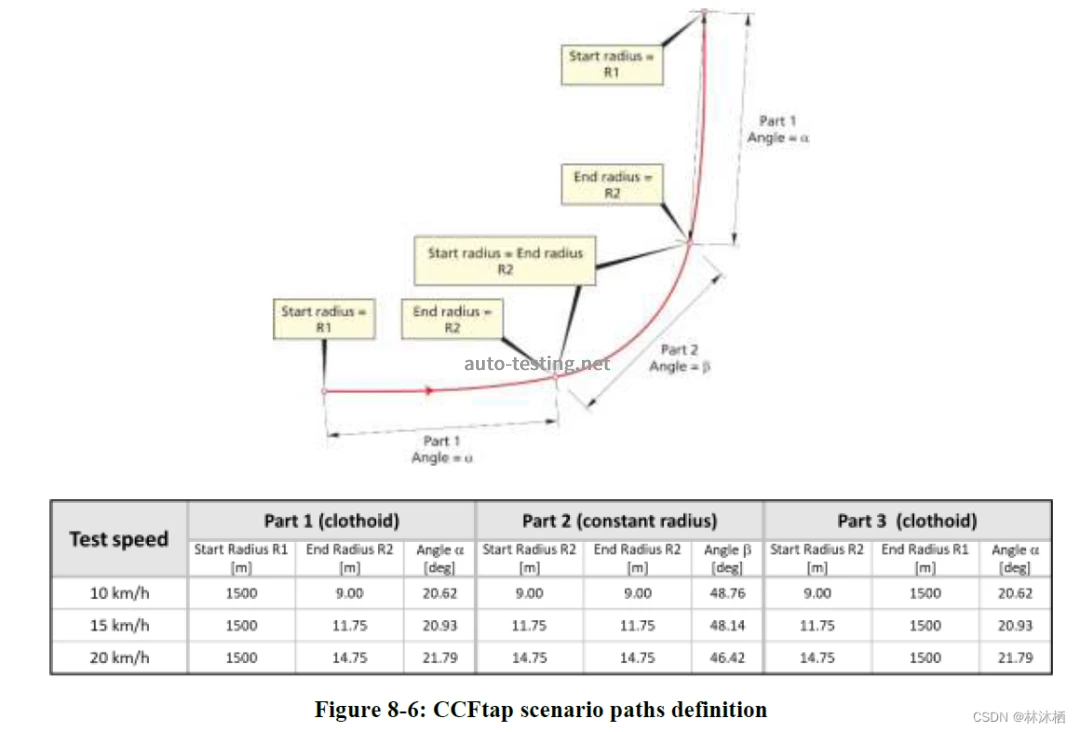
四种CPTA场景的路线轨迹设计
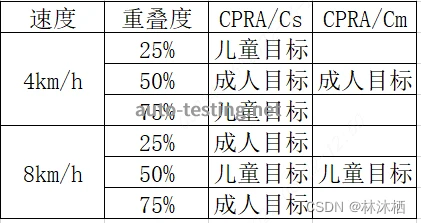
CPRA/C(Car-to-Pedestrian Reverse Adult/Child)
测试场景图示:
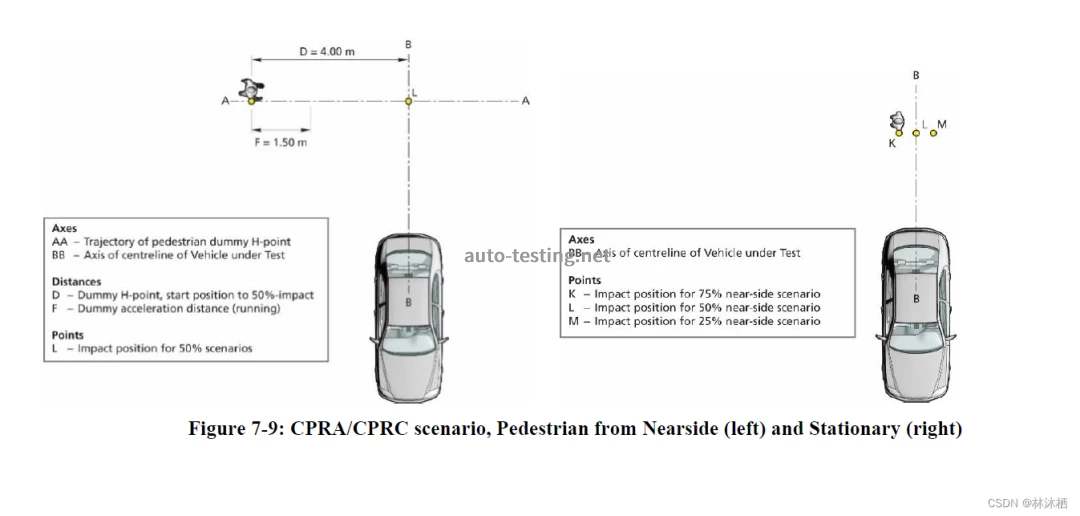
测试场景(Stationary)描述:
车辆向后行驶,在未施加制动作用的情况下,与后方站立的成人或儿童行人发生碰撞,且车辆后部结构以车辆宽度的25%、50%或75%撞击行人。
测试内容
白天状态下,车辆以4km/h和8km/h速度后退,与后方静止行人在25%&50%&75%处发生碰撞,测试当时的碰撞速度Vimpact是否为0km/h以及三种重叠度场景是否都通过
测试场景(Moving)描述:
车辆向后行驶,在未施加制动作用的情况下,与从后方左侧穿行的成人或儿童行人发生碰撞,且车辆后部结构以车辆宽度的50%撞击行人。
测试内容
白天状态下,车辆以4km/h和8km/h速度后退,后方左侧有行人横穿,经过1.5m加速,速度达到5km/h,再经过2.5m后,在50%处发生碰撞,测试当时的碰撞速度Vimpact是否为0km/h
被测目标选择
CBFA-50(Car-to-Bicyclist Farside Adult)
测试场景图示:
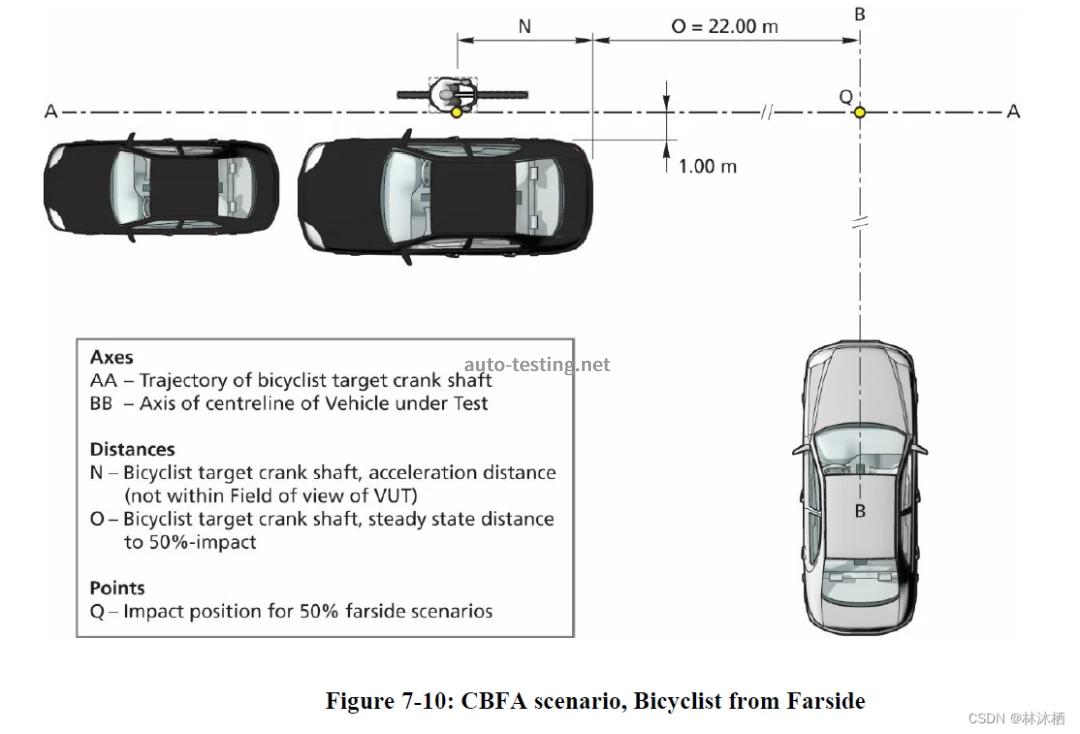
测试场景描述:
车辆向前行驶,骑行者从远侧骑自行车穿过其路径,当没有施加制动作用时,车辆前部结构以车辆宽度的50%撞击骑行者。
测试内容
白天状态下,车辆以10-60km/h速度行驶[步长为5km/h],此时前方盲区内存在骑行者,通过距离N加速至20km/h出现在车辆视角内,在行驶22m后,与车辆在50%处发生碰撞,测试当时的碰撞速度Vimpact
CBNA-50(Car-to-Bicyclist Nearside Adult)
测试场景图示:
测试场景描述:
车辆向前行驶,骑行者从近侧骑自行车穿过其路径,在没有施加制动作用的情况下,车辆前部结构以车辆宽度的50%撞击骑行者。
测试内容
白天状态下,车辆以10-60km/h速度行驶[步长为5km/h],此时前方盲区内存在骑行者,通过距离C加速至15km/h出现在车辆视角内,在行驶17m后,与车辆在50%处发生碰撞,测试当时的碰撞速度Vimpact
CBNAO-50(Car-to-Bicyclist Nearside Adult Obstructed)
测试场景图示:
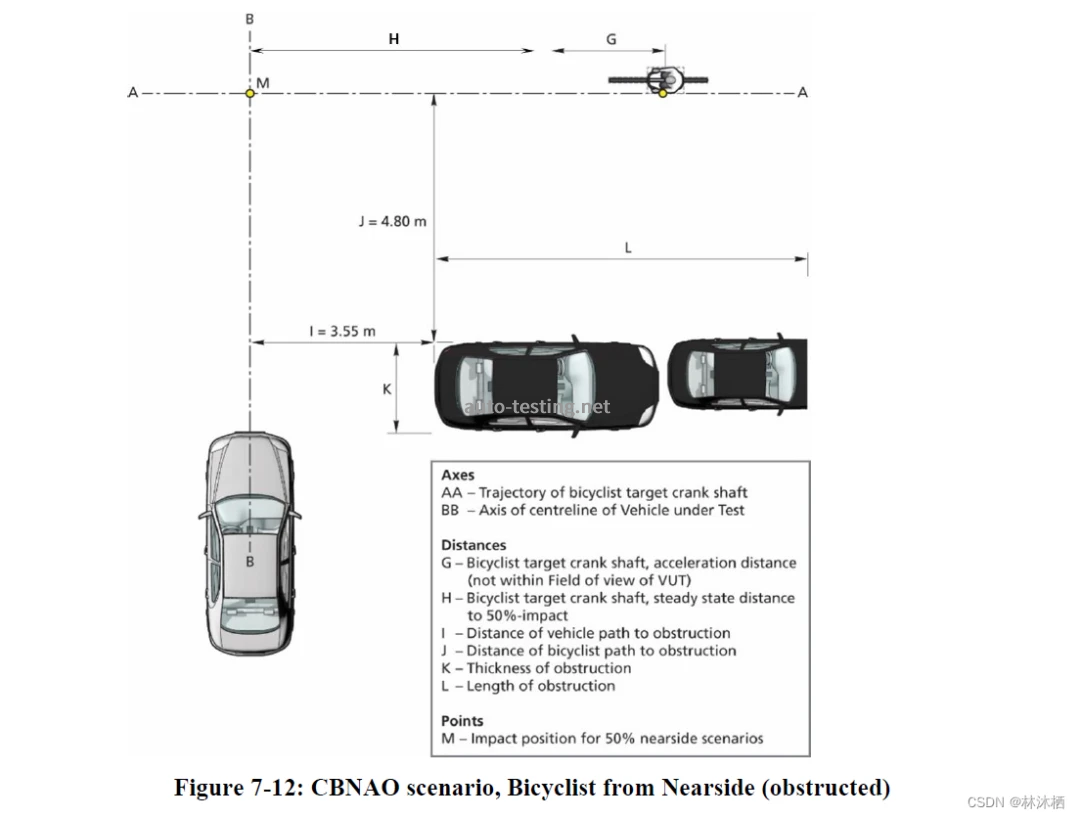
测试场景描述:
车辆向前行驶,有骑行者从近侧障碍物后面穿过其路径的,并且在没有施加制动作用的情况下,车辆的前部结构以车辆宽度的50%撞击骑行者
测试内容
白天状态下,车辆以10-60km/h速度行驶[步长为5km/h],此时前方盲区内存在骑行者,通过距离G加速至10km/h出现在车辆视角内,在行驶H后,与车辆在50%处发生碰撞,测试当时的碰撞速度Vimpact
CBLA(Car-to-Bicyclist Longitudinal Adult)
测试场景图示:

测试场景(AEB)描述:
车辆向前行驶,在车辆前方有骑行者以相同的方向行驶,在没有施加制动作用的情况下,车辆以车辆宽度的50%撞向骑行者。
测试内容
白天状态下,车辆以25-60km/h速度行驶[步长为5km/h],此时前方存在骑行者,通过距离3.5m加速至15km/h,在行驶28m后,与车辆在50%处发生碰撞,测试当时的相对碰撞速度Vrel_impact
测试场景(FCW/ESS)描述:
车辆向前行驶,在车辆前方有骑行者以相同的方向行驶,在没有施加制动作用的情况下,车辆以车辆宽度的25%撞向骑行者。
测试内容
白天状态下,车辆以50-80km/h速度行驶[步长为5km/h],此时前方存在骑行者,通过距离6.2m加速至20km/h,在行驶28m后,与车辆在25%处发生碰撞,测试当时FCW的碰撞时间TTC
CBTA(Car-to-Bicyclist Turning Adult)
测试场景图示:
测试场景(远侧)描述:
车辆向前行驶穿过交叉路口,此时有对向骑行者从远侧穿过其路径,在没有施加制动作用的情况下,车辆的前部结构以车辆宽度的50%撞击骑行者
测试内容
白天状态下,车辆以速度10-20km/h[步长为5km/h]向前行驶穿过交叉路口,此时有对向骑行者从远侧以15km/h速度穿过其路径,行驶一段距离后,与车辆在50%处发生碰撞,测试被测车辆是否侵入目标车辆路径
测试场景(近侧)描述:
车辆向前行驶穿过交叉路口,此时有对向骑行者从近侧穿过其路径,在没有施加制动作用的情况下,车辆的前部结构以车辆宽度的50%撞击骑行者
测试内容
白天状态下,车辆以速度10km/h向前行驶穿过交叉路口,此时有对向骑行者从远侧以15km/h速度穿过其路径,行驶一段距离后,与车辆在50%处发生碰撞,测试被测车辆是否侵入目标车辆路径
CBDA(Car-to-Bicyclist Dooring)
测试场景图示:
测试场景描述:
骑行者行驶于停止的汽车旁边,与车门发生碰撞
测试内容
白天状态下,车辆处于静止状态,后方2m处存在另一静止车辆,两车外侧平齐,此时后方距离外侧轴线1m处,存在骑行者以15km/h向前行驶,在骑行者行驶至D点处,驾驶员开始打开车门操作,在骑行者继续行驶8m后,于关闭后车门的最后点C处发生碰撞,测试综合时间TTC
CMRS(Car-to-Motorcyclist Rear stationary)
测试场景图示:

测试场景(AEB)描述:
车辆向前行驶,于静止摩托车手发生碰撞,以车辆前部结构50%撞击摩托车后部
测试内容
白天状态下,车辆以10-60km/h[步长为5km/h]速度向前行驶,前方存在静止摩托车手,行驶一段距离后,在车辆前部结构50%处发生碰撞,测试当时的碰撞速度Vimpact
测试场景(FCW)描述:
车辆向前行驶,于静止摩托车手发生碰撞,以车辆前部结构50%撞击摩托车后部
测试内容
白天状态下,车辆以30-60km/h[步长为5km/h]速度向前行驶,前方存在静止摩托车手,行驶一段距离后,在车辆前部结构50%处发生碰撞,测试当时的碰撞速度Vimpact
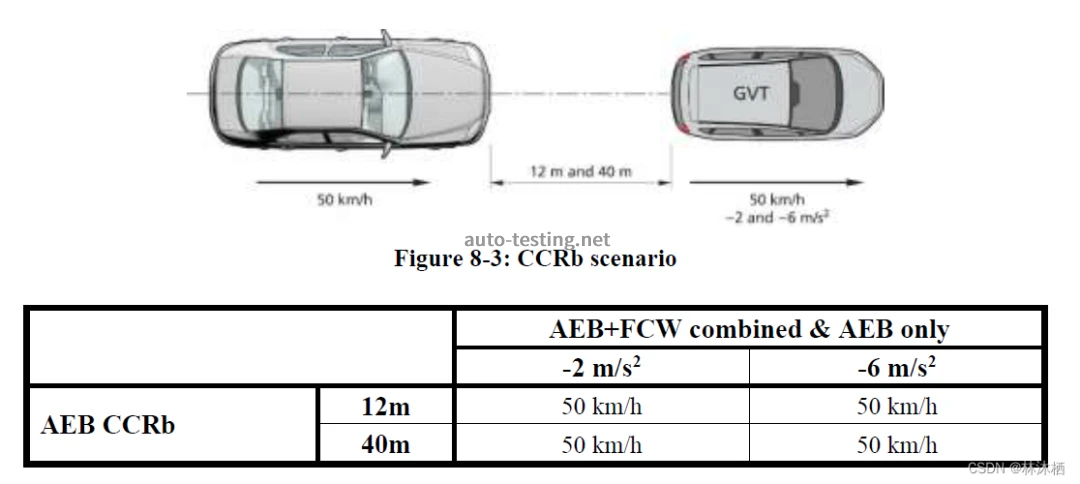
CMRB(Car-to-Motorcyclist Rear braking)
测试场景图示:
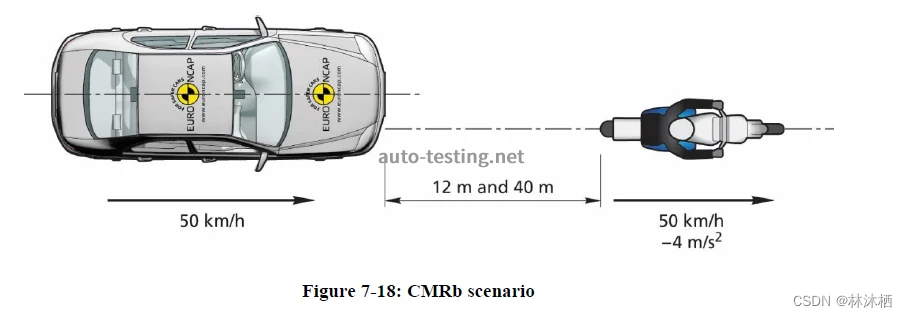
测试场景(AEB/FCW)描述:
车辆朝着以恒定速度行驶的摩托车驾驶员前进,之后摩托车减速,车辆前部结构撞击摩托车后部
测试内容
白天状态下,车辆以50km/h速度向前行驶,前方12m&40m处存在摩托车手以50km/h速度同向行驶,之后摩托车以-4m/s2[1s内达到对应减速度]的减速度减速,与车辆前部结构25%处发生碰撞,测试当时的碰撞速度Vimpact
CMFtap(Car-to-Motorcyclist Front turn across path)
测试场景图示:
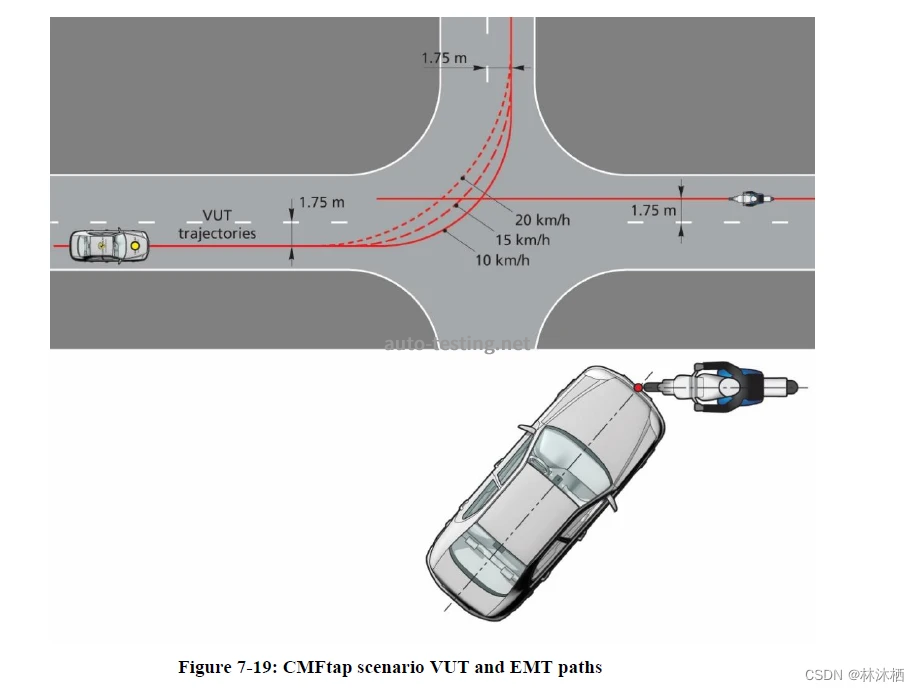
测试场景描述:
车辆转弯,一辆以恒定速度行驶的摩托车迎面驶来,车辆前部结构50%撞击摩托车前部。
测试内容
车辆以10-20km/h[步长为5km/h]向前行驶穿过交叉路口,前方存在摩托车以30-60km/h[步长为15km/h]速度迎面驶来,经过一段时间后,与车辆在50%处发生碰撞,测试车辆是否侵入目标摩托车路径
CMoncoming(Car-to-Motorcyclist oncoming)
测试场景图示:
测试场景描述:
车辆偏离车道,与相邻车道上以相反方向行驶的摩托车发生碰撞
测试内容
车辆以72m/h速度向前行驶以0.2-0.6m/s[步长为0.1m/s]横向速度偏离车道,前方相邻车道存在72km/h速度的摩托车迎面驶来,其中心轴线距离车道标线内侧1m,经过一段时间后,与车辆在10%处发生碰撞,测试车辆是否与目标摩托车发生碰撞
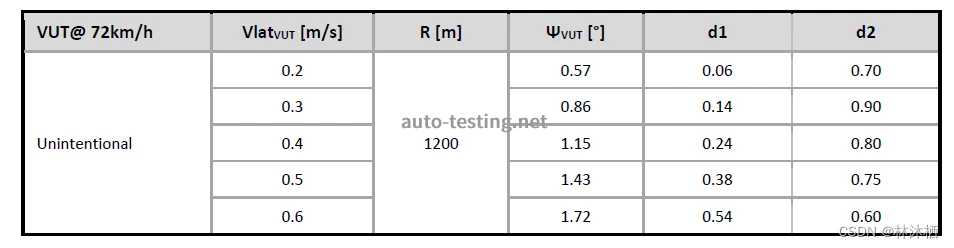
测试路径设计
CMovertaking(Car-to-Motorcyclist overtaking)
测试场景图示:
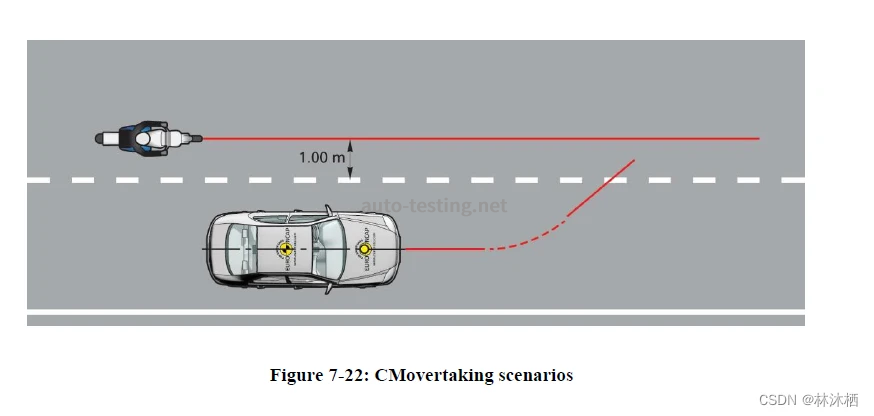
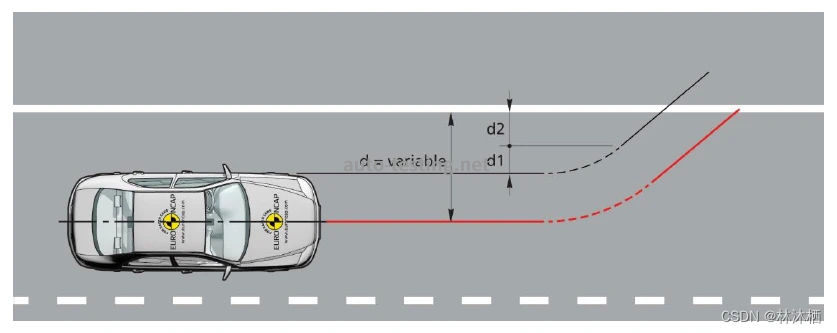
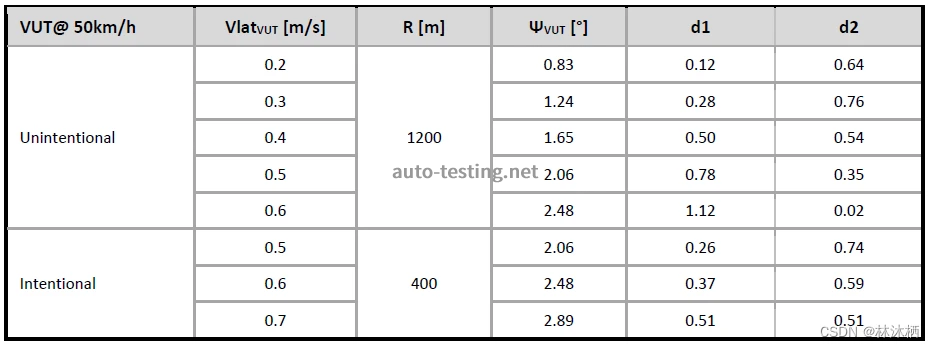
测试场景(无意识偏离)描述:
车辆偏离车道,与相邻车道上同一方向行驶的摩托车发生碰撞
测试内容
白天状态下,车辆以50km/h和72km/h速度向前行驶,此时车辆以0.2-0.6m/s[步长为0.1m/s]横向速度偏离车道,临侧车道存在骑行者延距车道线1m处轴线同向行驶,车速60km/h和80km/h,经过一段时间后,摩托车前轮与被测车辆后轮发生碰撞,测试车辆是否与目标摩托车发生碰撞
测试场景(有意识偏离)描述:
车辆偏离车道,与相邻车道上同一方向行驶的摩托车发生碰撞
测试内容
白天状态下,车辆以50km/h和72km/h速度向前行驶,此时车辆以0.5-0.7m/s[步长为0.1m/s]横向速度偏离车道,临侧车道存在骑行者延距车道线1m处轴线同向行驶,车速60km/h和80km/h,经过一段时间后,摩托车前轮与被测车辆后轮发生碰撞,测试车辆是否与目标摩托车发生碰撞
测试路径设计
评测方法及评测标准——SA
与VRU一样,在分析SA相关场景前,我们需要对评测方法提前做个了解
评测内容(测什么)
评测方法(怎么测)
-
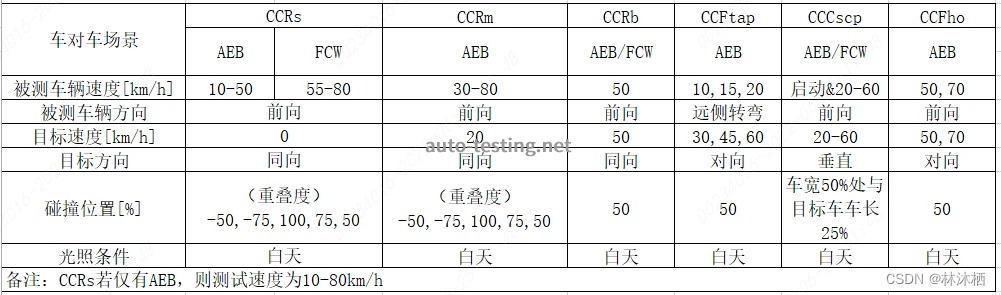
车对车场景
-
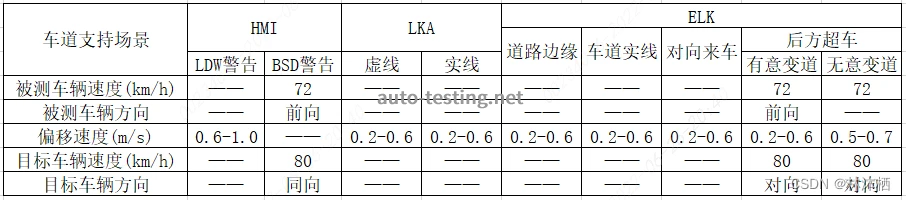
车道支持场景
-
速度辅助场景
评分标准(怎么打分)
Vimpact:当前测试车辆前端或者后端轮廓线与目标车辆重合时的速度,也就是碰撞速度
虽然CCR(AEB和FCW)、CCRb、CCFhos、CCFhol和CCCscp测试均是使用Vimpact评分标准,但是分数计算方法不同,如下:
1.CCRs(AEB)场景分数计算:
我们测出Vimpact后,需要根据以下原则来计算出对应的分数:
图中对每个测试速度下的Vimpact都进行了说明,我们将我们测得的实际Vimpact与上图对照,便可得到其对应的颜色。不同的颜色,其对应的比例是不一样的,具体如下:
对照上表,我们就可以知道每个测试速度下,对应的比例了,然后将比例乘以此测试速度下标准分数,就是我们得到的在对应测试速度下的实际分数,各测试速度下的标准分数如下:
根据上表,通过计算,就可以得到每个测试速度下的实际分数了,这里需要着重说明的是,我们算出来的是一次的分数,因为每个测试速度下,都需要测试-50%,-75%,100%,75%,50%总共5个重叠度,也就意味着要测试5次,并且计算5次,并且最终场景得分也不是简单的5次求平均分,有特定公式如下:
经过计算,我们得到每个测试速度下,5个重叠度算出的最终分数,然后将各测试速度下的最终分数想加,除以总分,算出百分比,在乘以场景标准分数,就是最终的实际场景分数
注意:CCRs FCW的50%碰撞实验不能完全避免碰撞时,若能通过ESA来规避碰撞,亦可得分
2.CCRb场景分数计算:
我们测出Vimpact后,需要根据以下原则来计算出对应的分数:
图中对每个测试速度下的Vimpact都进行了说明,我们将我们测得的实际Vimpact与上图对照,便可得到其对应的颜色。不同的颜色,其对应的比例是不一样的,具体如下:
对照上表,我们就可以知道每个测试速度下,对应的比例了,然后将比例乘以此测试速度下标准分数,就是我们得到的在对应测试速度下的实际分数,各测试速度下的标准分数如下:
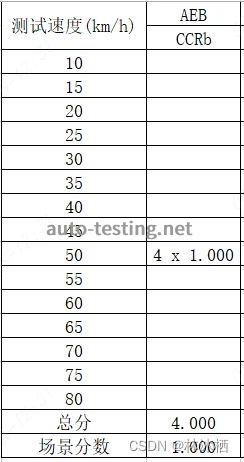
这里着重说明的是此场景下需要测4种变量组合,但要求测试速度是一样的,所以分数是4乘以1.0,我们将每个组合下算出的实际分数想加,除以总分4分,算出得分百分比

最后将百分比乘以场景最大可得分数,即为实际场景分数
3.CCFhos、CCFhol场景分数计算:
CCFhos和CCFhol场景虽然也是测Vimpact,但算得分的依据却是速度的减少量,通过初始速度减去Vimpact即可得到,其评分依据如下:
-如果减速≥20km/h,将获得0.25分。
-10km/h≤速度降低<20km/h,得0.125分
相关测试场景如下:

根据每个测试场景下的速度减少量,即可知道相应得分,然后将分数想加除以总分,即可得到得分比,再乘以场景最大可得分数,即为实际场景分数
4.CCCscp场景分数计算:
关于CCCscp的评分测试场景如下:
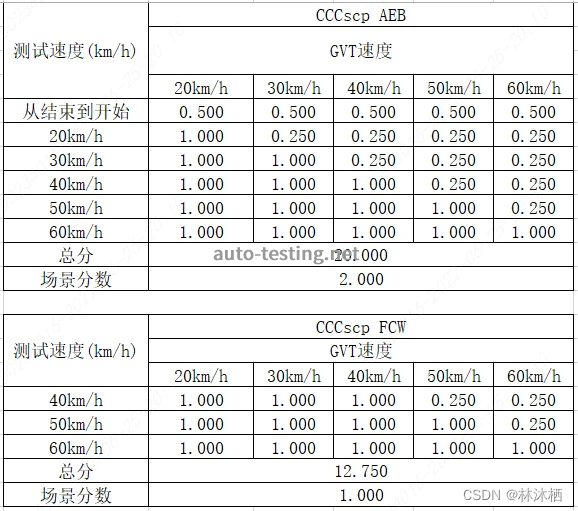
其判定的得分依据如下:
-VUT测试速度在≤30km/h(包括从停止启动)的分数根据碰撞避免的通过/失败标准进行评分。
-VUT测试速度在≥40km/h:
•如果车辆的AEB系统激活,并且避免了碰撞,则每次测试都会获得满分。
•如果车辆的AEB系统激活,以≥30km/h碰撞速度缓解碰撞,则每次测试可获得半分
-如果AEB避免了测试速度组合,则相应的FCW测试将自动获得分数
按照得分依据将每个测试速度下的分数想加,除以总分算出得分比,之后乘以场景最大可得分数,即为实际场景分数
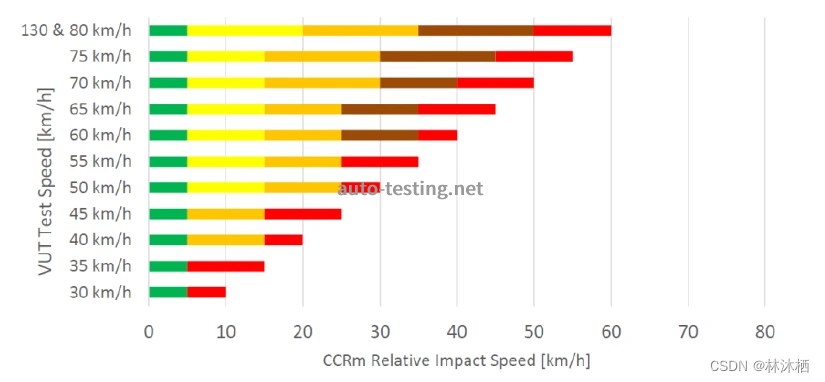
Vrel_impact:被测车辆撞击目标时的相对速度
测量Vrel_impact的场景是CCRm,其与Vimpact类似,先根据实测的Vrel_impact将所属颜色判断出来:
然后根据颜色,判断其对应比例:
之后将所得比例乘以对应测试速度下的标准分数,算出不同测试速度下的实际分数:
此处着重说明,此场景下需要测试-50%,-75%,100%,75%,50%五个重叠度,因此同一测试速度下,我们将得到5个实际分数,最终分数由这5个分数作如下运算得到:
通过上述计算我们得到不同测试速度下的最终分数,之后想加得到总分,再除以标准总分算出得分比,乘以场景最大可得分数,即为实际场景分数
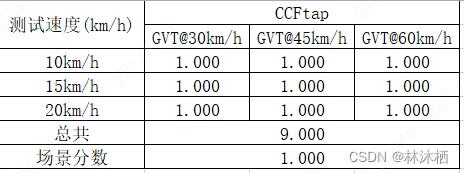
无碰撞:被测车辆与目标车辆不发生碰撞
此标准适用CCFtap场景,在各测试速度下,不发生碰撞即可获得对应分数。
将各测试速度下所得分数想加除以总分,算出得分比,再乘以场景最大可得分数,即为实际场景分数
FCW-HMI提示:包含FCW补充警告及皮带的可逆预张紧
具体标准如下:
从上面的CCR测试场景中,我们可以发现与FCW相关的主要是CCRs FCW和CCCscp FCW两个场景,这里需要说明一下:
1.CCRs FCW场景,用来作为FCW补充警告的测试场景,也就是说在CCRs FCW场景中除了基本的碰撞测试外,还包含FCW补充警告的测试,其中FCW补充警告测试的分数单独拿出来,作为HMI测试的子场景来算分;如果单靠AEB就可以实现避免80km/h以内的所有碰撞,则FCW自动获取对应分数
2.CCCscp FCW场景,此场景不用来作为HMI的测试场景,而是FCW作为碰撞测试的附加要求,在CCR场景>40km/h相对速度时,补充警告将用作制动的附加要求,也就是在此场景下,除了要满足碰撞要求外,还要满足-FCW要求,才能拿得分数。要求如下:
•在主AEB干预前≥0.5s以及峰值加速度≤-2米/秒²时,制动抖动可被接收
•在主AEB干预前≥0.5s期间,以≤-2米/秒²持续加速时,允许阶梯性部分减速
以上只是对FCW的场景做了额外说明,接下来回归正题,介绍一下分数的计算:根据FCW补充警告和皮带可逆预张紧测试结果得出分数,然后想加算出总分,除以标准总分算出得分比,最后乘以场景可得最大分数,即为实际场景分数
以上所有均为车对车场景的子场景得分,但最终整体场景得分还需进一步计算得出,计算如下:
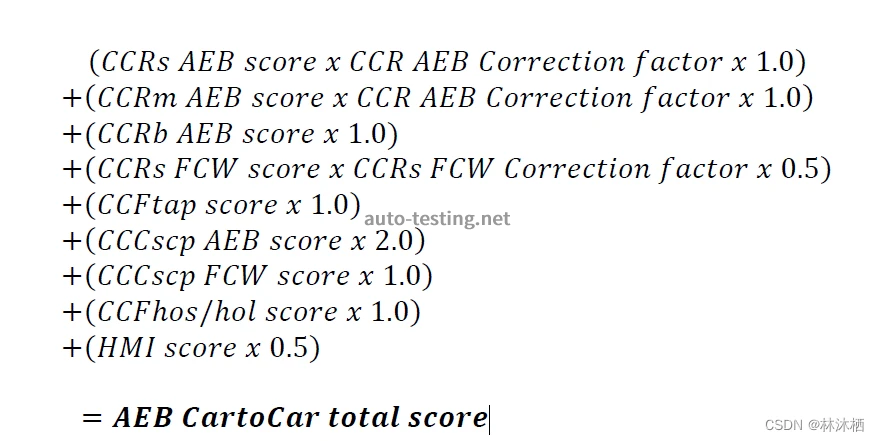
公式中包含AEB和FCW的校正因子,这两个因子是通过验证实验得出的。随机选取验证点,将验证点的实际分数除以预测分数,即为修正因子。
LSS-HMI提示:包含LDW警告/BSD警告
在LSS-HMI中,只要LDW在DTLE小于0.2m之前发出触觉警告或者BSD能够实时显示盲区信息,即可获取0.5分的HMI得分
DTLE:指在VUT穿过车道边缘之前,车道边缘和轮胎最外侧边缘之间的剩余横向距离(垂直于车道边缘)
其适用于LKA及ELK道路边缘、车道实线场景
1.LKA场景:只要保证车辆不会进入DTLE小于0.3m的区域即可获得分数
2.ELK道路边缘及车道实线场景:
道路边缘:只要保证车辆不会进入DTLE小于0.1m的区域即可获得分数;
车道实线:只要保证车辆不会进入DTLE小于0.3m的区域即可获得分数;
无碰撞:被测车辆与目标车辆不发生碰撞
LSS测试中,无碰撞适用于对向来车和后方超车场景,只要能避免碰撞,即可获得对应分数
与CC场景类似,LSS场景最后需要有一个综合分数,其分数为LSS子场景得分的总和:
是否配备相应功能:系统能够根据特定场景自动建议或控制车速
相应场景及对应分数如下:
各场景的详细解析——SA
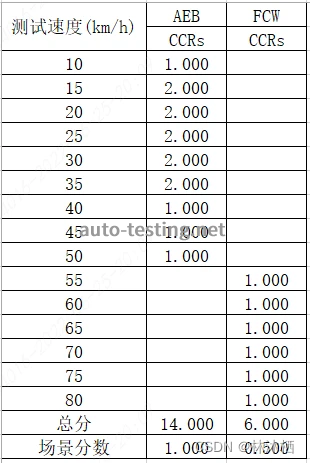
CCRs(Car-to-Car Rear stationary)
测试场景图示:
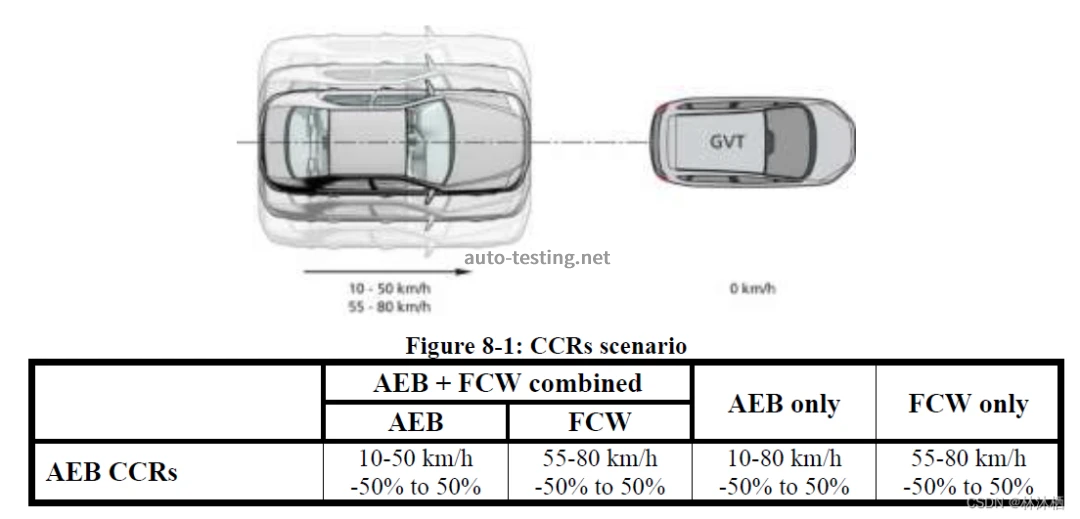
测试场景描述:
一辆车向前驶向另一辆静止车辆,车辆前部结构撞击另一辆车后部结构的碰撞
测试内容
车辆以X[步长为5km/h]速度向前行驶,与前车重叠-50%-50%[步长为25%]发生碰撞,测试当时的碰撞速度Vimpact
其中X范围与AEB和FCW的配置有关:
-
若车辆只装配FCW,则X为55-80km/h;
-
若车辆只装配AEB,则X为10-80km/h;
-
若车辆AEB与FCW均装配,则10-50km/h用于AEB测试,55-80km/h用于FCW测试
CCRm(Car-to-Car Rear moving)
测试场景图示:
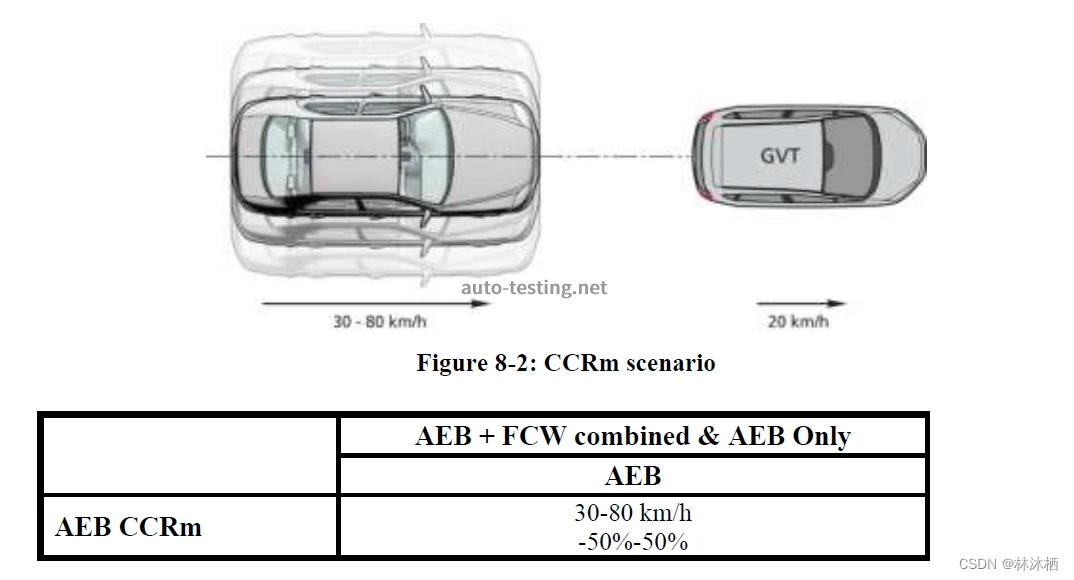
测试场景描述:
车辆向前行驶,前方存在以恒定速度行驶的汽车,被测车辆前部结构撞击另一辆汽车后部结构的碰撞
测试内容
车辆以30-80km/h[步长为5km/h]速度向前行驶,前方存在车辆以20km/h速度匀速行驶,与前车重叠-50%-50%[步长为25%]发生碰撞,测试当时的相对碰撞速度Vrel_impact
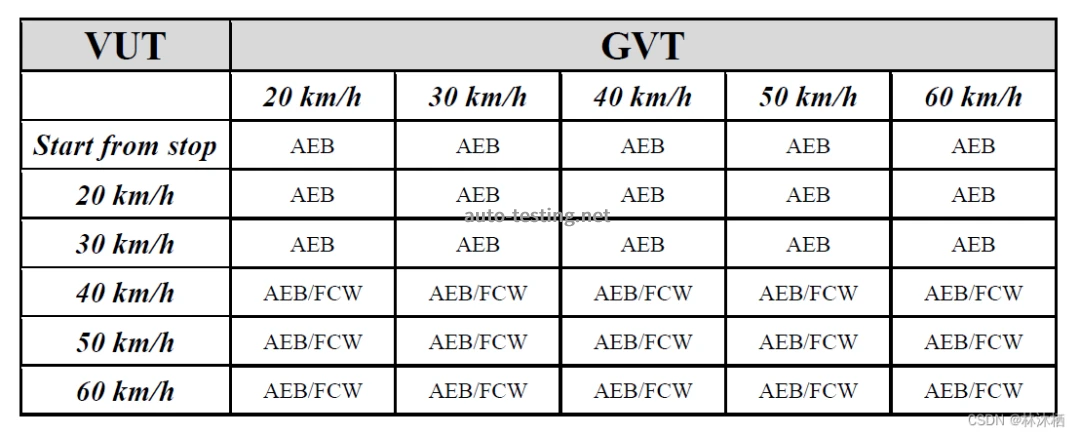
CCRb(Car-to-Car Rear braking)
测试场景图示:
测试场景描述:
车辆向前行驶,前方车辆以恒定速度行驶,之后前车减速,汽车前部结构撞击另一辆汽车后部结构的碰撞
测试内容
车辆以50km/h速度向前行驶,前方12m、40m处存在车辆以50km/h速度匀速行驶,之后前车以-2m/s2、-6m/s2减速度[1s内达到相应减速度]进行减速,两车发生碰撞,测试当时的碰撞速度Vimpact
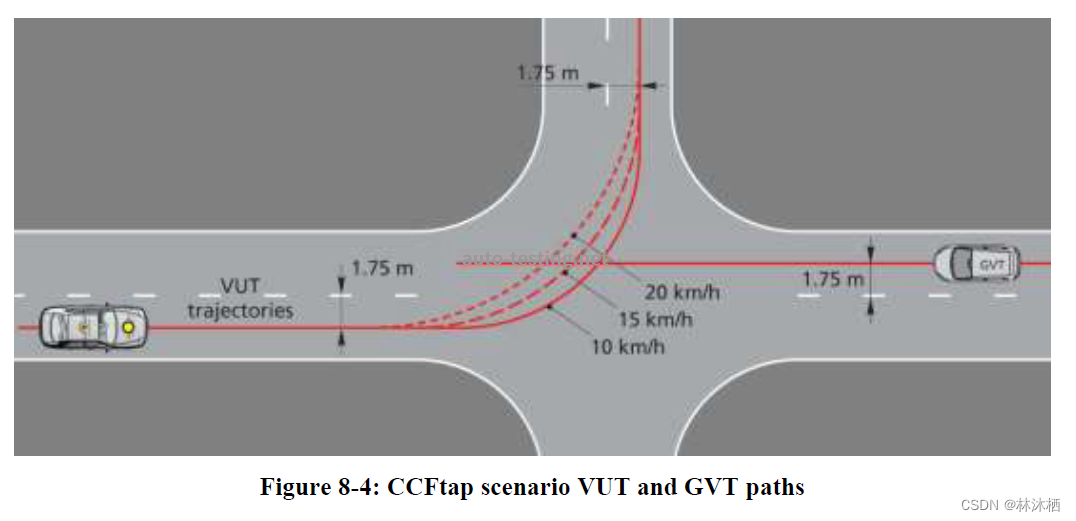
CCFtap(Car-to-Car Front turn-across-path)
测试场景图示:
测试场景描述:
车辆向前行驶穿过交叉路口,对向有恒定速度行驶车辆迎面驶来,车辆前部结构50%处撞击另一辆车辆前部结构的碰撞。
测试内容
车辆以10-20km/h[步长为5km/h]速度向前行驶,前方存在车辆以30-60km/h[步长为15km/h]速度迎面驶来,经过一段时间后。两车在50%处发生碰撞,测试被测车辆是否侵入目标车辆路径
测试路径设计
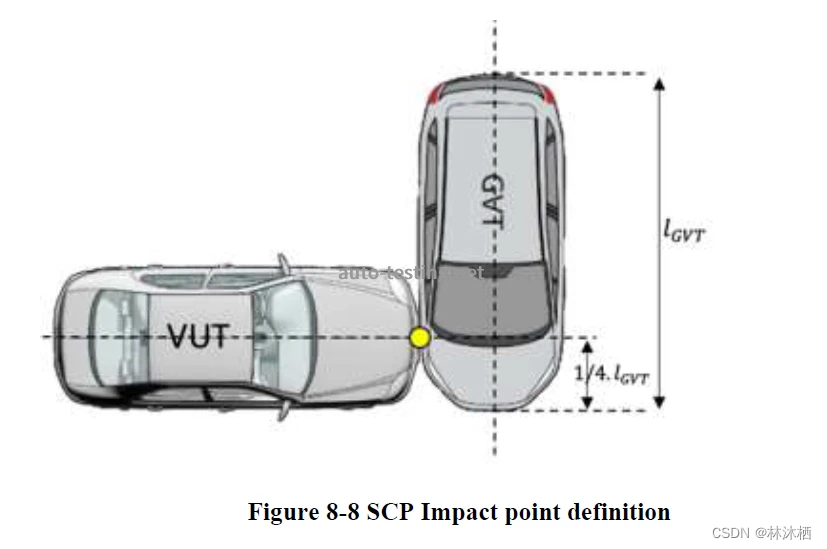
CCCscp(Car-to-car Crossing Straight Crossing Path)
测试场景图示:
测试场景描述:
车辆向前行驶径直穿过交叉口,此时在垂直路径上存在穿过交叉口的车辆,目标车辆在加速阶段以>1m/s2的加速度加速,之后进入0.5s的稳定阶段,进而达到稳态,经过一段时间后,测试车辆的前部结构撞击另一辆车辆的侧面。
测试内容
1.被测车辆以20-60km/h[步长为10km/h]速度向前行驶,此时垂直路径上存在目标车辆以20-60km/h[步长为10km/h]速度通过交叉路口,经过一段时间后。被测车辆车宽50%处与目标车辆车长25%处发生碰撞,测试当时的碰撞速度Vimpact
2.垂直路径上存在目标车辆以20-60km/h[步长为10km/h]速度通过交叉路口,被测车辆距离目标车辆轴线2.9m,被测车辆由停止启动,在1-1.5s内达到1.5±0.25m/s2的纵向加速度,在结束时的加速度仍大于1m/s2,在行驶2.9m后,被测车辆车宽50%处与目标车辆车长25%处发生碰撞,测试当时的碰撞速度Vimpact
相同场景下,若AEB可避免,则FCW不用再进行测试,自动通过
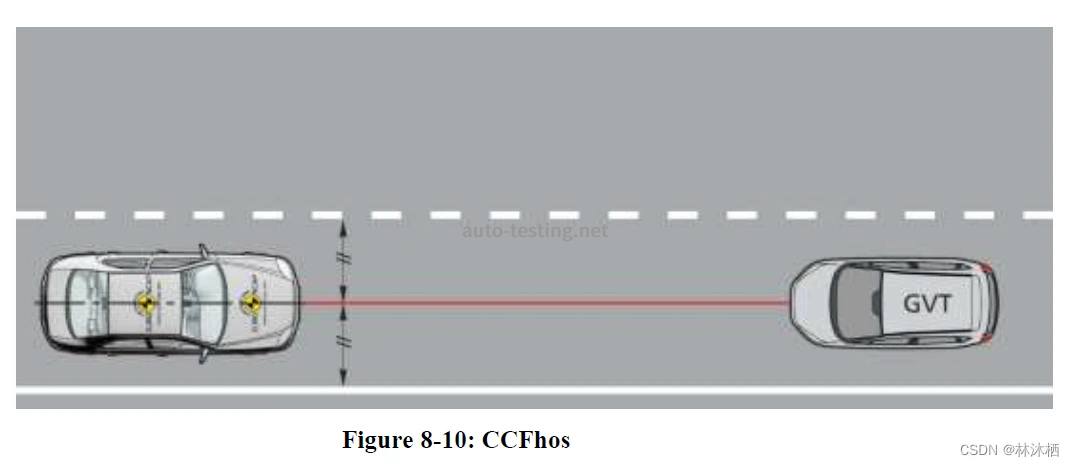
CCFho(Car-to-Car Front Head-On)
测试场景图示1:
测试场景描述:
车辆在其规定车道内沿直线路径行驶,并与另一辆行驶方向相反的车辆发生碰撞,该车辆已漂移至与被测车辆相同的车道。车辆的前部结构撞击另一个车辆的前部结构
测试内容
车辆以50km/h、70km/h速度向前行驶,前方存在车辆以50km/h、70km/h速度迎面驶来,经过一段时间后。两车发生碰撞,测试被测车辆的速度减少量
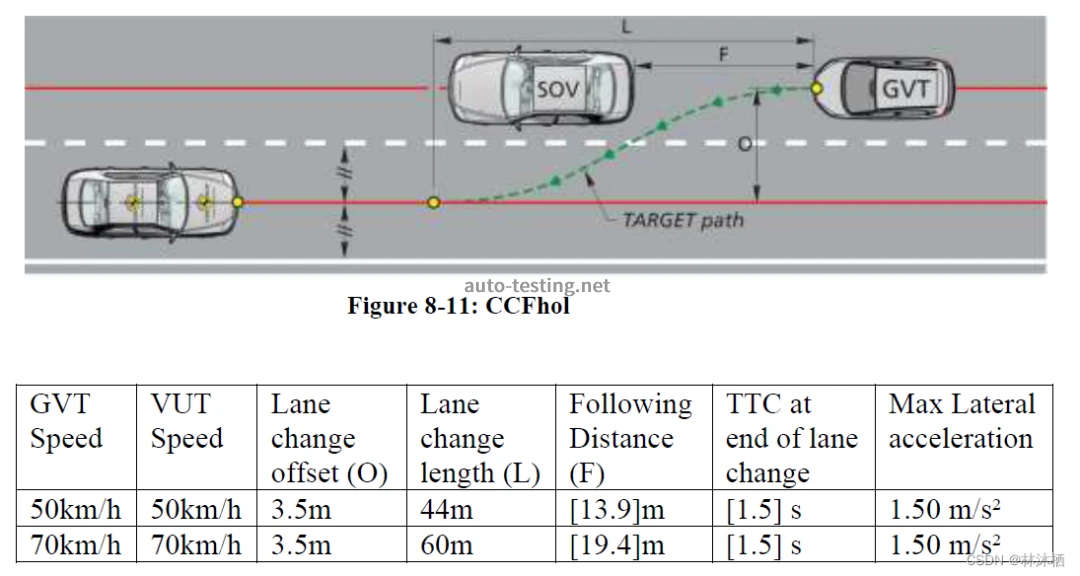
测试场景图示2:
测试场景描述:
车辆在规定车道内沿直线行驶,并与另一辆反向行驶的车辆发生碰撞,该车辆故意驶入被测车辆的车道,试图超车。车辆的前部结构撞击另一个车辆的前部结构
测试内容
被测车辆以50km/h、70km/h速度向前行驶,前方临侧车道存在对向目标车辆以50km/h、70km/h速度驶来,距第二车辆SOV距离13.9m、19.4m时,变道超车,变道距离44m、60m,横向最大加速度1.5m/s2,变道完成后,碰撞时间剩余1.5s,之后两车发生碰撞,测试被测车辆的速度减少量
FCW—HMI
测试场景描述:
CCRs FCW、CCCscp FCW、预碰撞阶段或ESS中的安全带可逆预张紧
测试内容
1.CCRs FCW:除所需的视听警告外,当TTC>1.2s(适用于CCRs FCW场景,包括所有重叠)发出警告时,还会发出更复杂的警告,如抬头显示、安全带抖动、制动抖动或任何其他触觉反馈。
2.CCCscp FCW:相对速度>40km/h时,补充警告将用作制动的附加要求:
•在主AEB干预前≥0.5s以及峰值加速度≤-2m/s²时,制动抖动可被接收
•在主AEB干预前≥0.5s期间,以≤-2m/s²持续加速时,允许阶梯性部分减速
3.预碰撞阶段或ESS中的安全带可逆预张紧
LSS—HMI
测试场景(LDW)图示:
测试场景(LDW)描述:
当以小于1m/s的横向速度运行时,任何在DTLE为-0.2m之前发出触觉警告的LDW系统都将被授予分数
测试内容
对于仅LDW系统或LDW可作为独立功能使用的系统,在0.6至1.0m/s[步长为0.1m/s]的横向速度范围内进行LKA单线测试,测试LDW系统是否在DTLE为-0.2m之前发出触觉警告。
测试场景(BSD)图示:

测试场景(BSD)描述:
车辆两侧配备盲点监控系统,以警告驾驶员盲点中存在其他车辆
测试内容
车辆以72km/h速度行驶,后方存在目标车辆以80km/h速度靠近,当测试目标前端进入图中红色区域内时,测试是否能够持续提供视觉盲点信息(注:为避免碰撞,测试目标周围的虚拟框不得超过D)
LSS—LKA
测试场景(虚线)图示:
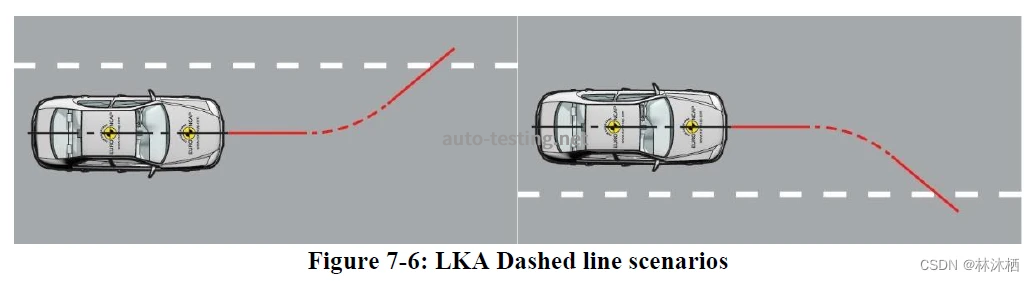
测试场景描述:
对于车辆两侧的偏离,将在0.2至0.6m/s的横向速度范围内,以0.1 m/s的增量步长进行LKA虚线试验
测试内容
被测车辆以0.2-0.6m/s[步长为0.1m/s]的横向速度偏移虚线车道,测试车辆是否会进入DTLE小于0.3m的区域
测试场景(实线)图示:
测试场景描述:
对于车辆两侧的偏离,将在0.2至0.6m/s的横向速度范围内以0.1 m/s的增量步长进行LKA实线试验
测试内容
被测车辆以0.2-0.6m/s[步长为0.1m/s]的横向速度偏移实线车道,测试车辆是否会进入DTLE小于0.3m的区域
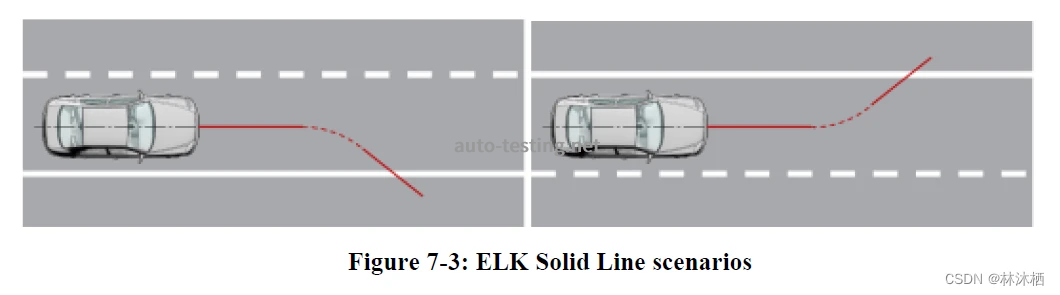
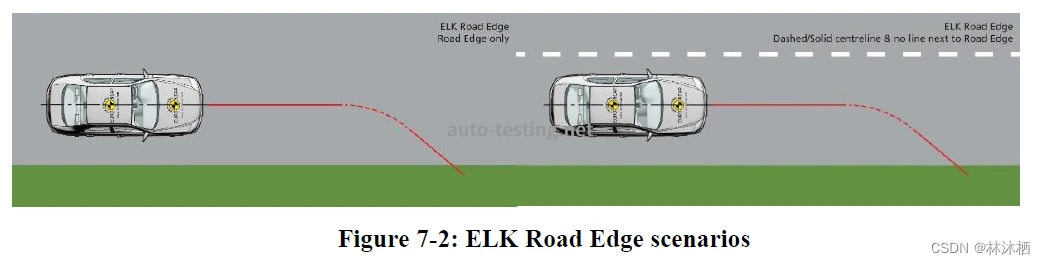
LSS—ELK
评分前提:
ELK功能上电开启
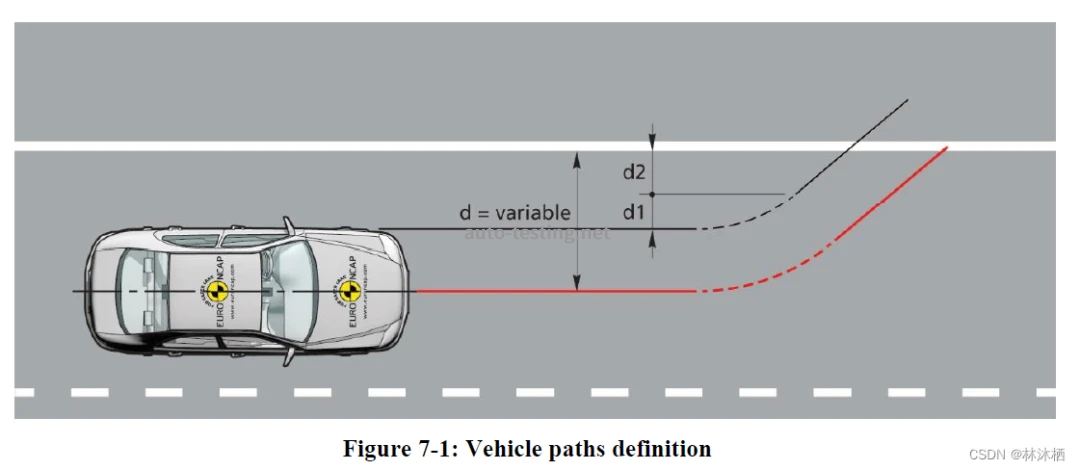
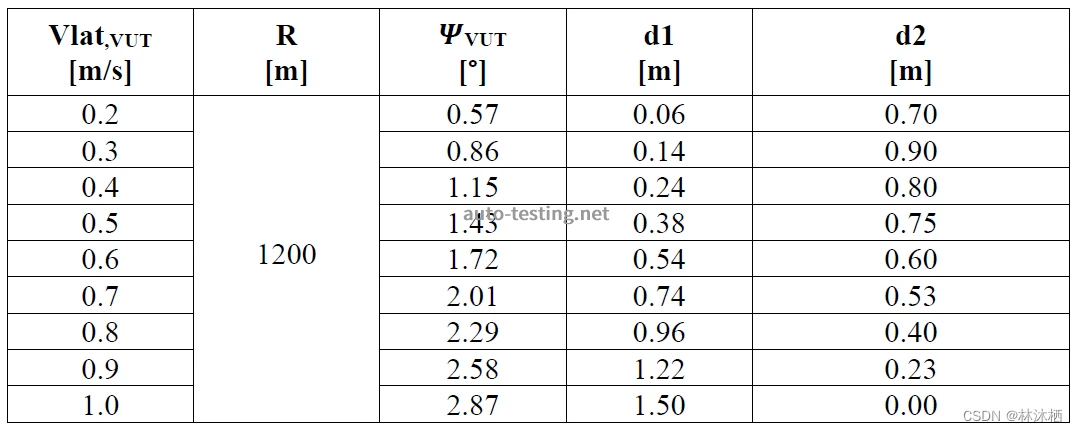
测试路径设计:
测试场景(道路边缘)图示:
测试场景描述:
ELK测试将以0.1 m/s的增量步长,在0.2至0.6m/s的横向速度范围内,仅在前排乘客侧偏离。
测试内容
被测车辆以0.2-0.6m/s[步长为0.1m/s]的横向速度偏移道路边缘,测试车辆是否会进入DTLE小于0.1m的区域
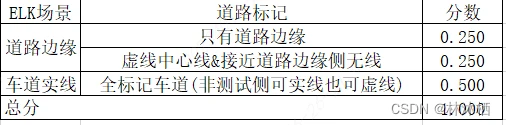
测试场景(车道实线)图示:
测试场景描述:
ELK实线测试将在0.2至0.6m/s的横向速度范围内,以0.1 m/s的增量步长进行,以便车辆在完全标记的车道上两侧偏离。(未测试侧可以是实心或虚线)
测试内容
被测车辆以0.2-0.6m/s[步长为0.1m/s]的横向速度偏移车道实线侧,测试车辆是否会进入DTLE小于0.3m的区域
测试场景(对向来车)图示:
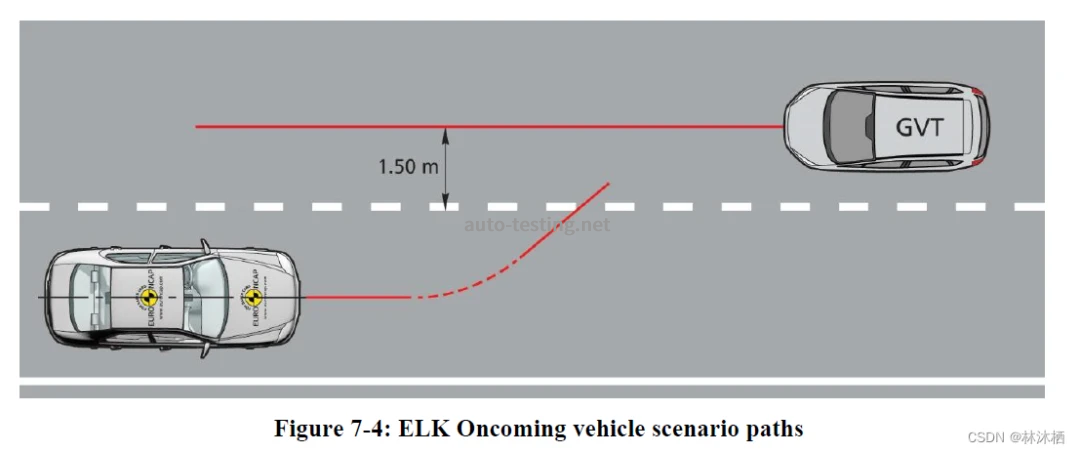
测试场景描述:
ELK对向来车测试将以0.1 m/s的增量步长,在0.2至0.6m/s的横向速度范围内,仅在驾驶员侧偏离
测试内容
被测车辆以0.2-0.6m/s[步长为0.1m/s]的横向速度偏移车道,以重叠率10%相撞,测试车辆能否避免碰撞
测试场景(后方超车)图示:
测试场景描述:
ELK超车试验将以0.1m/s的增量步长进行,对于非故意变道,横向速度范围为0.2至0.6m/s,对于故意变道,横向速度范围为0.5至0.7m/s,只在驾驶员侧偏离
测试内容
非故意变道:被测车辆以0.2-0.6m/s[步长为0.1m/s]的横向速度偏移车道,后车速度80km/h,被测车辆速度72km/h,目标车辆前缘与被测车辆后轴点相撞,测试车辆能否避免碰撞
故意变道:被测车辆以0.5-0.7m/s[步长为0.1m/s]的横向速度偏移车道,后车速度80km/h,被测车辆速度72km/h,目标车辆前缘与被测车辆后轴点相撞,测试车辆能否避免碰撞
对于故意变道的测试路径需要按如下设计:
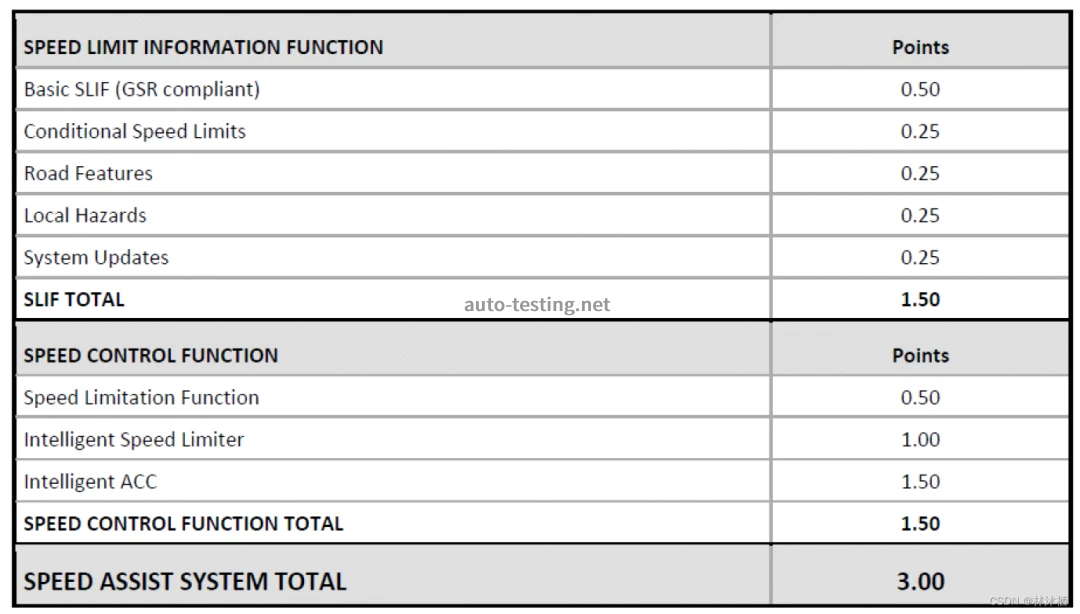
SA(Speed Assist)—Basic SLIF
1.限速应使用交通标志显示,并应在驾驶员的直接视野中清晰可见,无需将头部从正常驾驶位置移动,例如仪表盘或抬头显示器。
2.必须始终显示限速信息(不包括初始化期间和出于安全原因的临时中断)。指示的限速信息可以指示限速的可靠性水平
3.任何速度限制信息功能都需要一个警告功能,以指示驾驶员已超过Vlimit。警告功能应默认开启。驾驶员可将其完全或部分关闭,但可在每次激活车辆主控制开关后,将其恢复到正常操作模式。
-警告应为闪烁的交通标志,用于传达限速或交通标志的附加视觉信号。
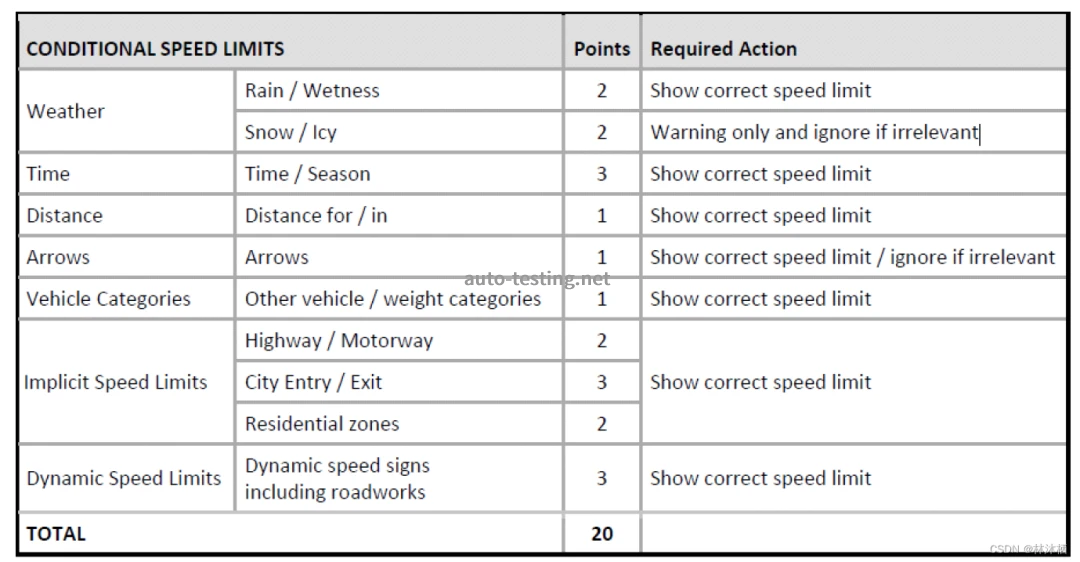
SA(Speed Assist)—Conditional Speed Limits
能够正确识别条件并采取相应行动,可以根据其能够识别、计算和正确显示的条件数量获取分数。
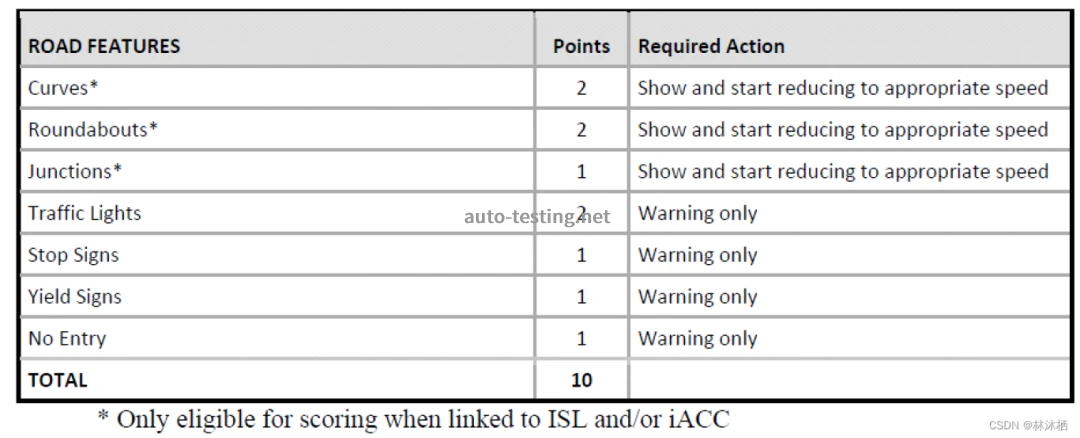
SA(Speed Assist)—Road Features
能够正确识别道路特征,并提供一个更适合和/或更建议的低于法定速度限制的速度或者车辆停车,可以根据道路特征的数量获取点数。
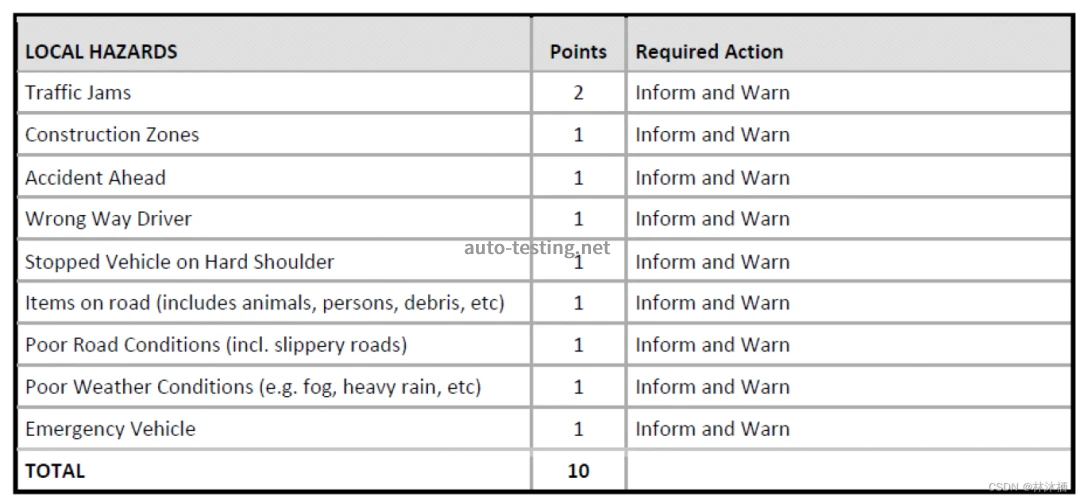
SA(Speed Assist)—Local Hazards
能够在进入车辆前视传感器视野之前接收信息并对其进行处理,然后发出局部危险警告
SA(Speed Assist)—System Updates
在车辆的整个使用寿命内,保持系统更新对于高准确性和可接受性至关重要。系统更新可能包括地图更新和/或与车速限制、条件车速限制和道路特征相关的速度辅助系统操作相关的任何软件更新。
SA(Speed Assist)—SLF(Speed Limitation Function)
1.应能通过驾驶员直接操作的控制装置,在30km/h和130km/h之间,以不大于10km/h的速度进行设置。
2.应能够独立于车速进行设置。
3.如果将Vadj设置为低于当前车速的速度,系统应在30秒内将车速限制为新的速度,或应在设置Vadj后的30秒内发出警告。
4.Vadj值应永久指示给驾驶员,并在驾驶员座椅上可见。这并不排除出于安全原因或驾驶员要求临时中断指示
SA(Speed Assist)—ISL(Intelligent Speed Limiter)
1.自动设置是使用SLIF的限速信息来设置Vadj。
2.iACC自动调整可以在驾驶员确认或不确认的情况下进行。满足本节要求的ISL和iACC功能都有资格获得分数:
-如果是ISL,减速和警告的激活时间应符合GSR ISA的一般要求。如果是iACC,系统应在限速改变后5s内采用或让驾驶员采用调整后的Vadj。
-如果Vadj设置为低于当前车速的速度,系统应在Vadj设置后不迟于30秒开始将车速限制为新的Vadj,或发出警告
-允许相对于已知限速的负偏移和/或正偏移,但不得大于10 km/h。该偏移量包含在Vadj中。
-ISL或iACC系统自动模式下的Vadj可在行程结束时保留。
-如果将Vadj设置为SLIF建议的速度限制,则Vadj的指示可能会被抑制。
SA(Speed Assist)—iACC(Intelligent Adaptive Cruise Control)
1.车辆速度应限制或控制为Vadj。
2.通过采取积极措施,仍有可能超过Vadj,例如更用力/更深踩油门或强制降档。
-在通过施加正向作用超过Vadj后,当车速降至小于或等于Vadj时,应重新激活速度控制功能。
-速度控制功能应允许正常使用油门控制进行档位选择。
-速度控制功能应确保,当实现稳定的速度控制时,Vstab应在Vadj的-5/+0 km/h范围内
注:2025年,欧洲NCAP将要求车速表精度为-3/+0 km/h
注:Vstab:指运行时的平均实际车速。Vstab计算为首次达到Vadj–10 km/h后经过10秒开始的20秒时间间隔内的平均实际车速。
-当速度控制功能无法限制和/或维持Vadj,并且超过Vadj时,将根据GSR ISA的一般要求发出警告。当积极行动导致Vadj超过时,或当SLIF建议Vadj时,无需发出警告。
-对于采用主动制动以维持和/或限制速度的系统,此警告要求不适用。
总结:E-NCAP 2023版的相关测试解析至此结束,其中主要是对AEB,FCW,BSD,LDW,LKA,ELK,ISLI,ISLC,iACC等ADAS功能的测试要求,解析这些场景对我们以后自动驾驶功能的设计开发可以起到一定的指导作用。
版权声明:本文为CSDN博主「林沐栖」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。原文链接:
https://blog.csdn.net/weixin_50875614/article/details/125139973







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
