




 广告
广告





















































FVCMS功能分类:按曲线半径分类

随着智能交通系统的快速发展,车辆安全系统也在不断升级,成为了现代汽车的重要组成部分。其中,前车碰撞警告系统(Forward Collision Warning System,简称FVCMS)是车辆安全系统中的一种关键技术,其通过检测前方障碍物,提醒驾驶员注意安全,避免前车碰撞事故的发生。而FVCMS系统的性能,主要由其曲线半径能力决定。本文将对FVCMS系统按照曲线半径能力进行分类,并详细介绍各级系统的特点和优缺点。
一、FVCMS系统概述
FVCMS系统是一种基于传感器技术的前车碰撞预警系统,通过车载摄像头、雷达或激光等传感器,实时监测前方障碍物的距离、速度和方向等信息,并根据算法进行分析和处理,预测前车的运动轨迹和可能出现的碰撞危险,向驾驶员发出警告,提醒其采取措施避免碰撞事故的发生。
二、按曲线半径能力分类
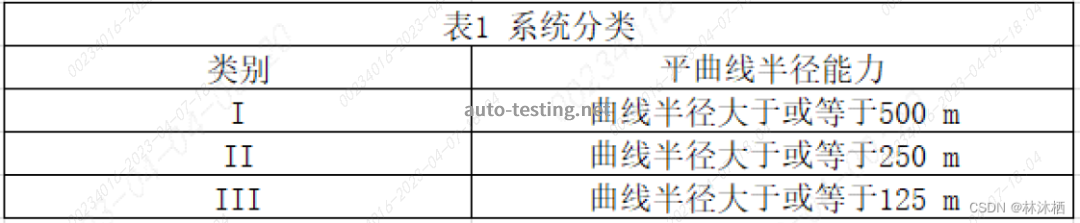
FVCMS系统的曲线半径能力,是指系统能够检测的前方障碍物在目标车辆行驶轨迹上所处的最小曲线半径。曲线半径越小,系统检测的距离越短,对驾驶员的提醒越及时,也更容易避免碰撞事故的发生。根据曲线半径能力的不同,FVCMS系统可以分为三级。
I级系统
I级系统应具有探测目标车辆轨迹中半径小于500米的前方障碍物车辆的能力。
I级系统是FVCMS系统中最基本的一级系统,其曲线半径能力为500米。这种系统通常采用单一传感器,如雷达或激光雷达等,可以实现对目标车辆行驶轨迹中的前方障碍物进行监测,提醒驾驶员采取措施,避免碰撞事故的发生。但是,由于其曲线半径能力较低,只能检测到目标车辆轨迹中距离较远的障碍物,对于曲线半径较小的弯道路段,往往不能及时发出及时警告,限制了系统的应用范围和性能表现。
II级系统
II级系统应具有探测目标车辆轨迹上半径小于250米的前方障碍物车辆的能力。
II级系统相较于I级系统,曲线半径能力提高到了250米。这种系统通常采用多传感器结合的方式,如激光雷达与摄像头联合使用,以提高系统的检测能力和准确度。在曲线半径较小的路段,II级系统可以更加准确地检测到前方障碍物,发出更及时的警告,提高了驾驶员的反应时间和避免碰撞事故的可能性。
III级系统
III级系统应具有检测目标车辆轨迹上半径小于125米的前方障碍物车辆的能力。
III级系统是FVCMS系统中曲线半径能力最高的一级系统,其能够探测目标车辆轨迹上半径小于125米的前方障碍物车辆,是目前最先进的FVCMS系统之一。这种系统通常采用多传感器结合,如摄像头、雷达和激光雷达等多种传感器联合使用,以实现对车辆行驶轨迹上更小曲线半径的障碍物进行实时监测和警告。III级系统具有更高的准确度和及时性,能够在更复杂和高风险的驾驶场景下提供更可靠的保护,例如城市道路、高速公路等。
三、总结
FVCMS系统是一种重要的车辆安全技术,其按曲线半径能力进行分类,可以满足不同驾驶场景的需求。虽然不同级别的系统在曲线半径能力上存在差异,但其目的都是为了提醒驾驶员注意前方障碍物,避免前车碰撞事故的发生。在实际应用中,需要根据驾驶场景和安全要求,选择合适的FVCMS系统。同时,随着科技的不断进步和发展,FVCMS系统的曲线半径能力也将不断提高,为更加智能和安全的汽车出行保驾护航。







最新资讯
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
-
基于不同控制算法的半主动悬架仿真研究
2025-04-11 10:20
-
不允许起火爆炸,GB 38031《电动汽车用动力
2025-04-11 10:15
-
C-NCAP与IVISTA的中国重型商用车测评规程
2025-04-11 10:13
-
标准解读|GB/T20717-2024新标发布!
2025-04-11 10:10
