




 广告
广告





















































智能汽车VIL测试系统的结构与原理


随着智能交通和自动驾驶技术的快速发展,智能互联汽车的测试评价已成为关键问题之一。然而,由于安全和经济成本等原因,道路测试无法满足测试需求。因此,车载系统(Vehicle-in-the-Loop, VIL)应运而生。VIL是将ADAS系统集成到真实车辆中,通过实时模拟器和仿真软件模拟道路和交通场景以及传感器信号,从而构建一个完整的测试环境,实现整车ADAS功能的验证和多场景虚拟测试。本文将介绍VIL测试系统的结构和原理。
一、测试系统的软件和硬件结构
如图1所示,VIL测试系统由实时仿真系统、虚拟场景生成系统、电源系统、惯性导航组合系统、信号转换系统和真实车辆等组成。其中,主要设备如下:
实时仿真系统:主要由LabVIEW和CompactRIO(Compact Reconfigurable Input/Output)硬件平台构成。CompactRIO是由NI公司开发的一种高性能工业嵌入式控制器,具有实时性能和可编程性能,可实现高速数据采集和处理。
虚拟场景生成系统:主要由CarMaker HIL+主机构成,可实现复杂场景的仿真,同时也可以将仿真数据与实际车辆运行数据进行整合,从而实现仿真和实际测试的无缝衔接。
电源系统:提供系统所需的电力和电能,保证整个测试系统的正常运行。
惯性导航组合系统:由GPS和IMU两个模块组成,可以提供车辆的位置、姿态和速度等信息。
信号转换系统:主要由下位机组成,将仿真系统中生成的信号转换为传感器信号,并发送到被测功能的控制决策模块。
真实车辆:提供真实的车辆环境,用于测试整车ADAS功能。
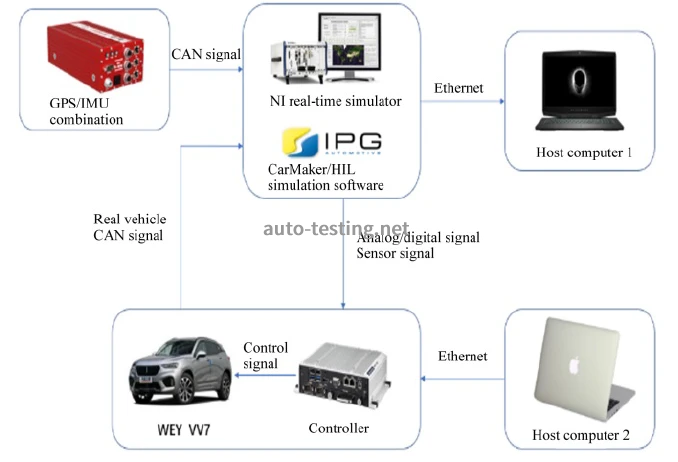
图1 VIL测试系统的软件和硬件结构
二、系统的测试原理
VIL测试系统的原理是将ADAS系统集成到真实车辆中,通过实时仿真器和虚拟场景生成系统模拟道路和交通场景,以及传感器信号,从而构建一个完整的测试环境。测试过程如下:
1.真实车辆在一个开放的、足够安全的平地上运行,OXTS的差分定位系统获得主车辆的初始运动状态。
2.实时仿真系统计算出主车在虚拟环
境中的位置信息、速度、加速度、姿态等数据,以及周围环境信息,例如其他车辆、行人、障碍物等。这些信号被转换为传感器信号,并被发送到被测功能的控制决策模块。
3.控制决策模块根据传感器信号进行计算,生成相应的控制信号。这些信号被传输到CAN总线上,用于车辆控制,从而改变车辆的实际运行状况。同时,仿真系统不断更新车辆状态和周围环境信息,并根据实时反馈不断调整仿真参数,使仿真和实际测试保持同步。
4.测试结果被记录下来,经过分析和处理,用于评估和改进被测功能的性能和可靠性。
VIL测试系统的优点在于可以在实际车辆环境中进行测试,同时又不受时间和空间限制,可以进行多次、多场景的测试,大大提高了测试效率和可靠性。同时,通过虚拟场景生成系统可以模拟复杂的交通场景和各种天气条件,对ADAS系统进行全面的测试和验证。
三、智能互联汽车VIL测试平台的应用实例
数据资源中心的智能互联汽车VIL测试平台是一个基于NI硬件和软件平台的完整测试系统,包括车辆控制、数据采集、数据处理和测试结果分析等功能。该平台已成功应用于多个项目中,例如:
1.自动驾驶系统测试:通过模拟真实的交通场景和车辆运行状态,测试自动驾驶系统的可靠性和安全性。
2.自动泊车系统测试:通过模拟不同停车场景,测试自动泊车系统的准确性和稳定性。
3.车道偏离预警系统测试:通过模拟不同路况和车速,测试车道偏离预警系统的灵敏度和准确性。
4.前碰撞预警系统测试:通过模拟不同车速和距离,测试前碰撞预警系统的反应时间和准确性。
智能互联汽车VIL测试平台是一种重要的测试评价方法,可以提高ADAS系统的可靠性和安全性,促进智能交通和自动驾驶技术的发展。



编辑推荐




最新资讯
-
货车侧滑检测异常数据集群的成因分析 ——
2025-04-09 15:32
-
网络研讨会 | 4月16日HBK智能传感器
2025-04-09 12:21
-
褚教授课程笔记 | 工作变形分析(Operating
2025-04-09 12:19
-
深度讲解仰望U7水平对置发动机
2025-04-09 12:15
-
重磅!东风汽车重大突破
2025-04-09 12:15
