




 广告
广告





















































基于滑模控制的4WID电动汽车直线行驶稳定性控制策略

编者按:随着电动驱动汽车技术的不断发展,四轮独立驱动电动汽车(4WID EV)因可以独立控制各驱动轮的控制优势,使其在当今的研究过程中得到较多的关注。由于4WID电动汽车可以分别控制车轮转矩,这使得其在车辆稳定性控制方面具有天然的优势,近年来,有大量学者以4WID电动汽车为研究对象,对整车稳定性控制策略进行优化。本文基于滑模控制策略,对在低附着路面上行驶的4WID电动汽车的车辆稳定性进行研究,保证了车辆在行驶过程中的车辆姿态。同时对车轮的滑转率进行监测控制,提高整车的稳定裕度。
本文译自:
《A NOVEL ConTROL STRATEGY OF STRAIGHT-LINE DIVING STABILITY FOR 4WID ELECTRIC VEHICLES BAESD ON SLIDING MODE CONTROL》
文章来源:
2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI)
作者:
Zhen Liu, Yiran Qiao, Xinbo Chen
原文链接:
https://ieeexplore.ieee.org/document/9661119/
摘要:针对四轮独立驱动(4WID)电动汽车在低附着路面上直线行驶时的稳定性问题,提出了一种新的滑模控制策略,提高了车辆直线行驶时的安全性和稳定性。首先建立了车辆的 7 自由度动力学模型,在此基础上分析了 4WID 电动汽车的稳定性问题。根据分析结果,设计了基于滑模控制(SMC)的附加横摆力矩控制器,选取了横摆角、横摆角速度和侧向位移作为控制量,采用双侧调节方式,以及时地调整车辆姿态,防止车辆跑偏。同时,为了提高整车的稳定裕度,设计了基于 PID 控制的滑转率控制器。基于 Carsim-Simulink 联合仿真平台,在均一低附着路面和对开路面的工况下对设计的策略进行了验证。仿真结果表明,与无控制相比,提出的控制策略取得了较好的效果,可以有效地提高车辆的直线行驶稳定性。
Ⅰ 简介
近些年来,随着全球范围内汽车保有量的不断增长,能源危机和大气污染的问题日益突出,电动汽车逐渐成为了研究热点。其中,四轮独立驱动(4WID)电动汽车因其各种优势而受到了研究者们的关注。4WID 电动汽车采用多个电机作为动力源,可以独立分配各轮的驱动转矩,这使其具有更多的控制自由度,从而可以采用更为先进的控制方法来提高其动态性能[1]。但是,由于缺少机械部件约束,若不施加控制,在外界干扰下车辆很容易跑偏。作为一种常见的工况,汽车直线行驶时的稳定性应得到足够重视,倘若汽车在外界干扰下依然能稳定地保持直线行驶,那么驾驶员的驾驶难度可以大大降低,整车的安全性也得到了提升。因此,研究 4WID电动汽车在直线行驶时的控制策略具有重要意义。
当前,世界上已经有很多关于四轮独立驱动电动汽车直线行驶稳定性的研究。文献[2]和[3]分别研究了双电机和单电机故障情况下的直线控制策略。文献[4]和[5)提出了减少由电机误差引起的驾驶偏差的方法。文献[6]对电动推土机的直线行驶稳定性进行了研究,选择横摆角速度作为控制量, 设计了基于模糊 PID 的控制策略,其思路与 4WID 电动汽车很相似。文献[7]基于模糊控制,提出了一种驱动防滑控制方法,以提高 4WID 电动汽车的加速性能 和稳定性。文献[8]以4WID 电动汽车的操纵稳定性为目标,设计了一种优化的控制策略,采用分层控制结构,包括车辆运动控制器和转矩分配控制器。文献[9]研究了4WID 电动汽车的横摆力矩稳定问题,利用有限时间控制技术和非线性扰动观测器来设计控制器,使得横摆角速度和质心侧偏角达到期望值,提高了控制精度。文献[10]提出了一种车轮耦合力最小分配策略,通过合理分配每个车轮的驱动转矩,提高了车辆的稳定裕度。综上所述,目前的研究主要集中于电机对于直线行驶稳定性的影响,对于低附着路面带来的影响没有深入研究。此外,上述文献在设计稳定性控制器时,主要以横摆角或者横摆角速度作为控制量,忽视了执行过程中各种延迟的影响,对于延迟所带来的侧向位移没有充分考虑。因此,为了解决上述问题,本文开展了低附着路面工况下直线行驶稳定性控制策略的研究。
在这篇论文里,提出了一种基于滑模控制的稳定性控制策略,以横摆角、横摆角速度和侧向位移为控制量,使得汽车在低附着路面的工况下,能实现稳定地直线行驶。这篇论文的结构如下:第二节建立了车辆的 7 自由度动力学模型;第三节分析了 4WID 电动汽车在低附着路面上直线行驶时的稳定性问题;第四节进行了控制策略的设计;第五节在低附着路面和对开路面上进行了仿真验证;第六节提出了结论。
Ⅱ 4WID 电动汽车的动态模型
在这一节中,建立了 4WID 电动汽车的 7 自由度动力学模型。7个自由度包括车身的纵向运动、侧向运动和横摆运动以及四个车轮的转动。在建模时,进行了一些简化。假设车辆是在平坦的水平路面上行驶的,并且关于中心轴左右对称。本文研究的是低附着路面对于直线行驶稳定性的影响,因此忽略电机误差、侧向风等因素的干扰。此外,由于研究的重点在于直线行驶时的控制策略,因此将方向盘的转向角固定为 0,依靠四个车轮的转矩来抑制车辆跑偏,从而降低驾驶员的驾驶难度。建立的 7 自由度模型如图 1 所示。
在图 1 的7 自由度模型中, 表示轴距,和 分别表示质心至前轴和后轴的距离, 表示轮距,和 分别表示各个车轮的纵向力和侧向力,表示汽车的纵向速度,表示汽车的侧向速度, 表示汽车的横摆角速度。下标代表前轮(f)和后轮 (r),代表左轮(l)和右轮(r)。
汽车的纵向运动方程为:

式中, 代表汽车的质量。
汽车的侧向运动方程为:

汽车的横摆运动方程为:

式中,代表汽车绕Z轴的转动惯量。
车轮的转动方程为:

式中,代表车轮的转动惯量,代表车轮的角速度,代表驱动力矩,代表轮胎的滚动半径。
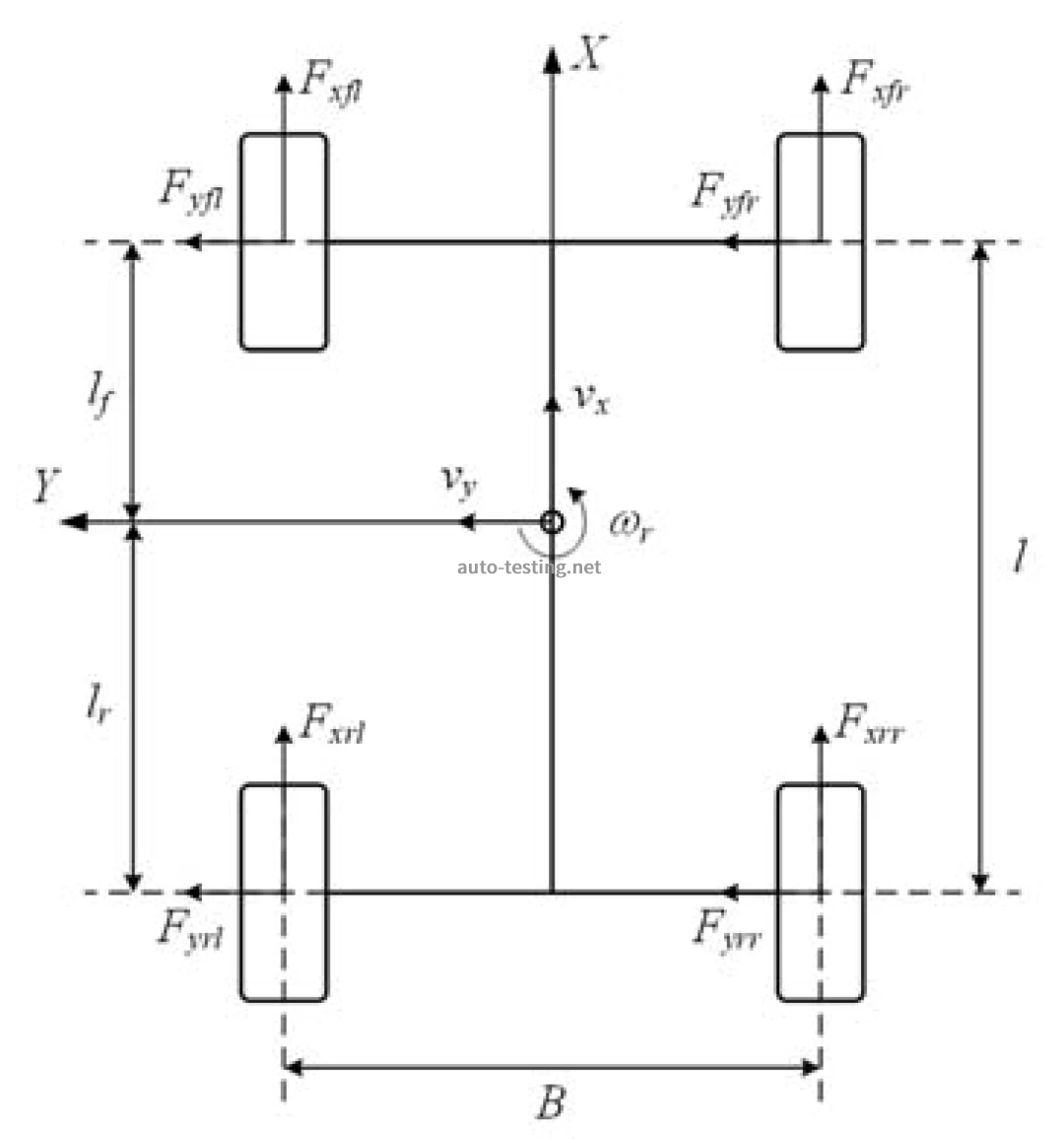
图 1 七自由度模型
III 4WID电车在低附着路面的直线行驶稳定性分析
当车辆行驶在高附着路面上时,由于路面附着系数较高,车轮的驱动力一般不会超过地面提供的附着力,车辆行驶的稳定性较好。但是,当车辆行驶在低附着路面上时,情况就复杂了许多。若不施加控制,车辆很容易失去稳定性,出现跑偏的现象。因此,在设计控制策略前,需要对车辆在低附着路面上的直线行驶稳定性进行分析。
低附着路面可以分为两种,一种是均一低附着路面,另一种是部分低附着路面。均一低附着路面是指路面的附着系数为恒定的值,且数值较小。部分低附着路面是指路面左右侧的附着系数不同,通常一侧比较小,另一侧比较大,本文将其称为对开路面。
A.均一低附着路面
当车辆行驶在均一低附着路面上时,两侧车轮的接地情况相同,因此两侧的驱动力一致,车辆不会产生跑偏现象,如图2(a)所示。但是,由于路面附着系数很小,轮毂电机提供的驱动力通常会大于地面提供的附着力,车轮会发生过度滑转,滑转率迅速增大。当车轮的滑转率很大时,轮胎的侧向附着系数很小,车辆的稳定性会变得很差,即使车辆受到很小的侧向力,也可能发生侧滑的危险。
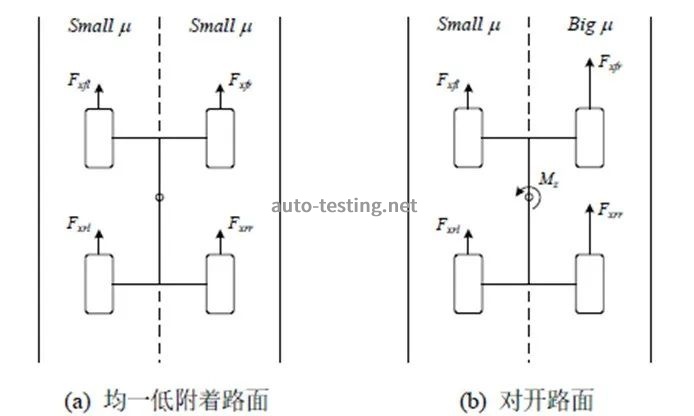
图2 两种地附路面上的车辆状态
B.对开路面
当车辆行驶在对开路面上时,两侧车轮所处路面具有不同的附着系数,对于高附着路面一侧的车轮来说,轮毂电机提供的驱动力小于地面提供的附着力,因此车轮驱动力为轮毂电机提供的驱动力,数值较大;而另一侧车轮的驱动力为所处的低附着路面提供的附着力,数值较小。这导致左右两侧车轮的驱动力不一致,车辆会产生横摆力矩,如图2(b)所示。若不施加稳定控制会导致车辆出现跑偏现象,不能保证直线行驶。此外,处在低附着路面一侧的车轮会发生过度滑转,降低车辆的行驶稳定性。
IV 稳定控制策略设计
在这一节中,首先从整体的角度介绍了控制策略的架构;其次,设计了车速跟随控制器;接着设计了基于滑模控制的附加横摆力矩控制器,其以横摆角、横摆角速度和侧向位移为控制量,并根据李雅普诺夫第二法证明了其渐进稳定性;然后,为了提高车辆的稳定裕度,设计了基于PID的滑转率控制器;最后,阐述了力矩的分配规则。
A.稳定控制策略架构
图3展示了本文提出的稳定性控制策略的架构。首先,根据驾驶员期望车速与当前车速,通过车速跟随控制器得到广义驱动力矩。然后,根据反馈的车辆状态信息,通过附加横摆力矩控制器得到横摆修正力矩来修正车辆姿态避免跑偏,通过滑转率控制器得到滑转调整力矩来防止车轮出现过度滑转,提高车辆的行驶稳定性。最后,根据设置的规则将广义驱动力矩、横摆修正力矩和滑转调整力矩协调分配至各个车轮,驱动车辆进行直线行驶,从而实现闭环控制。
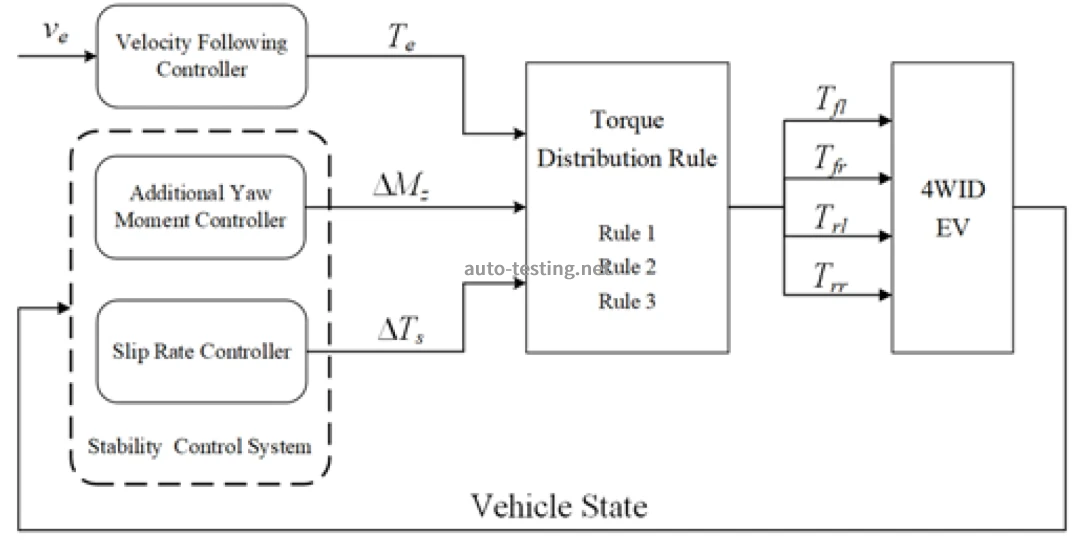
图3 直线行驶稳定性控制策略架构
B.车速跟随控制器
本文的重点是进行稳定性控制,对于车速跟随控制不作深入研究。由于PID 控制具有结构简单、调整方便、鲁棒性好的优点,因此本文采用经典的PID 控制方法来进行车速跟随控制器的设计。车速跟随控制器以驾驶员期望车速和当前车速作为输入,输出为广义驱动力矩,其控制律为:

式中,为广义驱动力矩,为驾驶员期望车速;为当前车速,、、分别为比例、积分和微分系数。
C.附加横摆力矩控制器
车辆在对开路面上直线行驶时,会产生非期望的横摆角速度和侧向运动。因为滑模控制系统的结构不固定,可以在动态过程中根据车辆实时的状态有目的地变化,因此可以快速有效地调整车辆的姿态,使得车辆按照预定的直线路径行驶。因此采用滑模控制方法来进行附加横摆力矩控制器的设计。本文研究的是车辆直线行驶时的控制策略,将方向盘的转向角固定为0,通过调节两侧车轮的驱动力来产生横摆修正力矩。由式(3)可以得到横摆修正力矩的表达式如下:
式中,表示横摆修正力矩。
附加横摆力矩控制器的作用是限制车辆在直线行驶时由于路面附着系数造成的横摆和侧向运动,以横摆角、横摆角速度和侧向位移为控制变量,通过滑模控制获得横摆修正力矩,及时纠正车辆的姿态,使得横摆角、横摆角速度和侧向位移均保持在0附近。
在设计滑模控制系统时,首先需要根据选取的控制变量来构造切换面函数。横摆角能够反映车辆跑偏的方向,横摆角速度可以表示车辆跑偏过程的变化快慢,因此通常被用来控制车辆产生的非期望横摆运动。然而,在实际行驶中,由于控制执行过程中存在各种延迟和干扰,车辆会产生一定的侧向位移,这对于汽车的安全性是极为不利的,同时也影响了汽车跟踪直线路径的精确程度。因此,本文也将侧向位移作为控制变量。综上所述,选取横摆角、横摆角速度和侧向位移来构造滑模控制切换面函数如下:

式中,为横摆角速度,为横摆角,为侧向位移,、、分别为横摆角速度、横摆角和侧向位移的权重系数。
为了削弱滑模控制的抖振现象,采用带饱和函数的指数趋近律:

式中,,。饱和函数的表达式如下:

取李亚普诺夫函数为

显然,是正定函数。对时间的一阶导数为

将式(8)代入式(11),可以得到
当时,;
当时,,;
当且时,,;
当时,,。
即时,。因此是负定函数,由李雅普诺夫第二法可知,闭环系统是渐进稳定的。
由式(7)和(8)可得

将式(12)代入式(6)得到横摆修正力矩如下:
D.滑转率控制器
当轮毂电机提供的驱动力大于路面提供的附着力时,车轮就会发生滑转。当滑转率过大时,车轮的侧向附着系数会大大减小,导致车辆的稳定性变差。以此,对滑转率控制器进行设计是很有必要的。在本文中,滑转率阈值取15%,记为15%。当车轮的实际滑转率大于阈值时,认为车轮存在过度滑转,基于PID的滑转率控制器介入工作;否则车轮被认为是正常的,并且滑转率控制器不介入工作。
车轮滑转率的计算公式为:

其中表示车轮的实际角速度。
由于车轮速度易于测量,且车轮速度与角速度之间的转换关系非常简单,因此可以等效地将车轮角速度作为控制量。滑转率阈值对应的车轮角速度阈值为:
因此,滑转调节力矩的表达式是:
其中,表示各个车轮的滑转调节力矩,、和分别表示比例、积分和微分系数。
E.力矩分配规则
4WID电动汽车最终是由四个车轮驱动行驶的。因此应当研究如何将从各个控制器获得的力矩分配给各个车轮。为此,力矩分配规则被设置。
1)规则1:对于车速跟随控制器输出的广义驱动力矩,将其平均分配至各个车轮。
2)规则2:对于附加横摆力矩控制器输出的横摆修正力矩,采用双侧调节的原则进行分配。
双侧调节意味着两侧车轮的力矩调整量大小相等,符号相反,这样可以减少车辆姿态的调整时间。各个车轮的横摆修正力矩为:
3)规则3:对于滑转率控制器输出的滑转调整力矩,直接将其分别分配至对应的车轮。
本文研究的是低附着路面对于直线行驶稳定性的影响,因此忽略电机误差造成的干扰,直接将分配的力矩传递至车辆。但是从实际的角度来看,仍然有必要限制分配的力矩。因此,各个车轮获得的力矩为:

式中,、和表示各车轮的广义驱动力矩、滑转调整力矩和横摆修正力矩,表示峰值力矩。
V 控制策略的仿真与分析
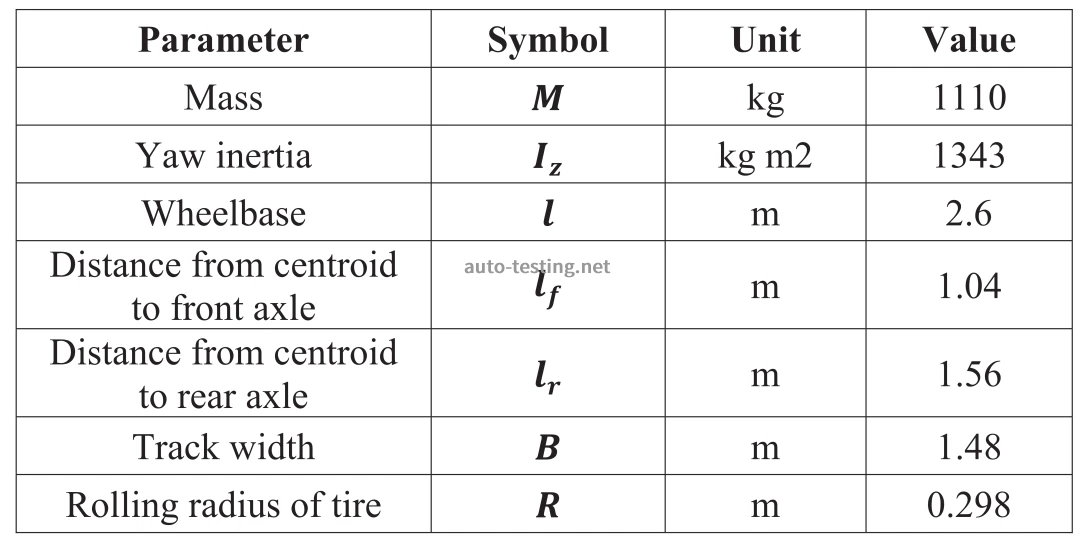
在这一节中,在Carsim-Simulink联合仿真平台上对所提出的控制策略进行仿真和验证,并对仿真结果进行了分析。模拟路面为均一低附着路面和对开路面。仿真工况为无稳定性控制和有稳定性控制。前者意味着只有广义的驱动力矩被分配到每个车轮,车辆模型的参数如表1所示:
表1 车辆模型参数
A.均一低附着路面
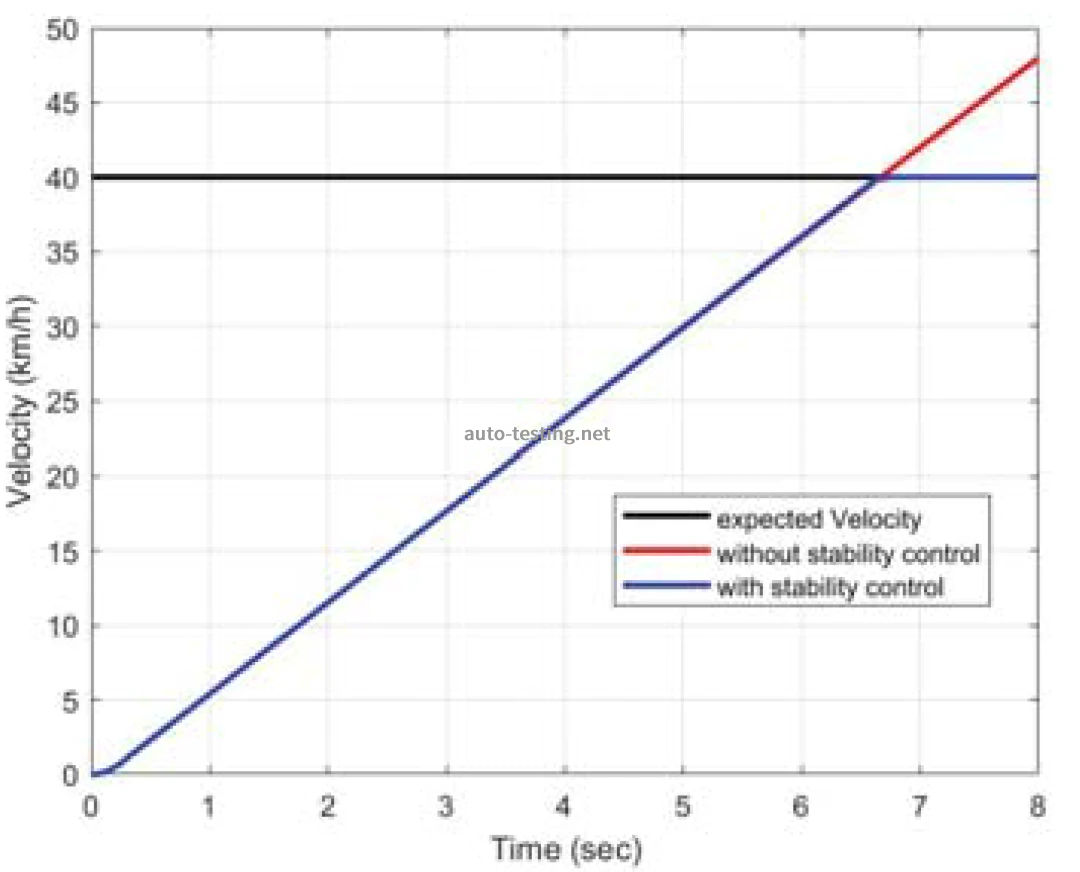
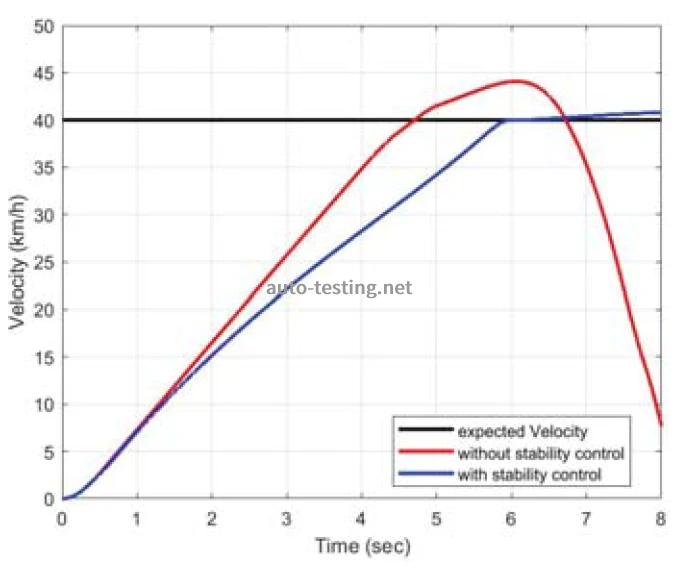
路面附着系数设置为0.2,期望速度为40km/h,车辆从静止状态加速。仿真结果如图4所示。当没有施加稳定性控制时,车辆速度在达到期望值后继续增加。这是因为此时车轮过度滑转,即使轮毂电机不输出转矩,车轮速度下降也需要一段时间,因此车速继续上升。在采用稳定性控制后,很明显地看出车速可以很好地跟随期望速度,基本没有超调。通过比较图中四个车轮的滑转率可以看出,在使用稳定性控制后,滑转率迅速下降到设定的阈值附近,这说明了所提出的控制策略具有更好的车辆稳定性和有效性。
(a)车辆速度
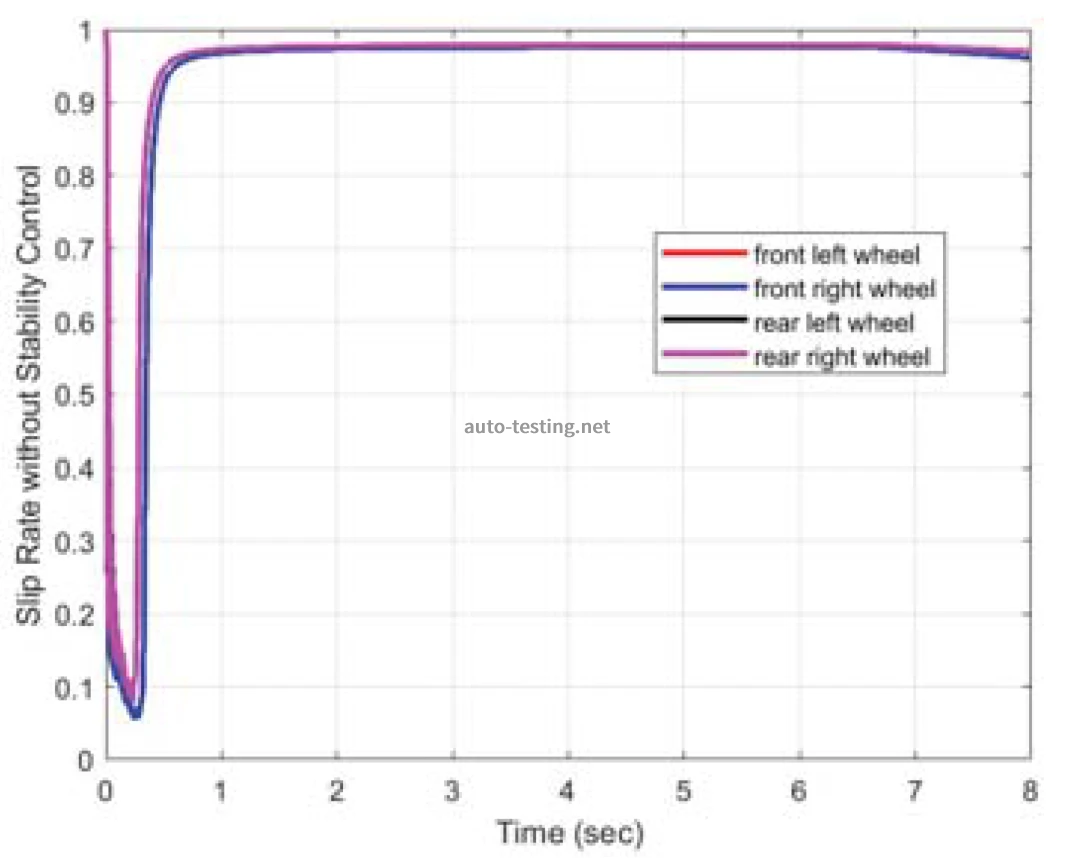
(b)无稳定性控制各车轮滑转率
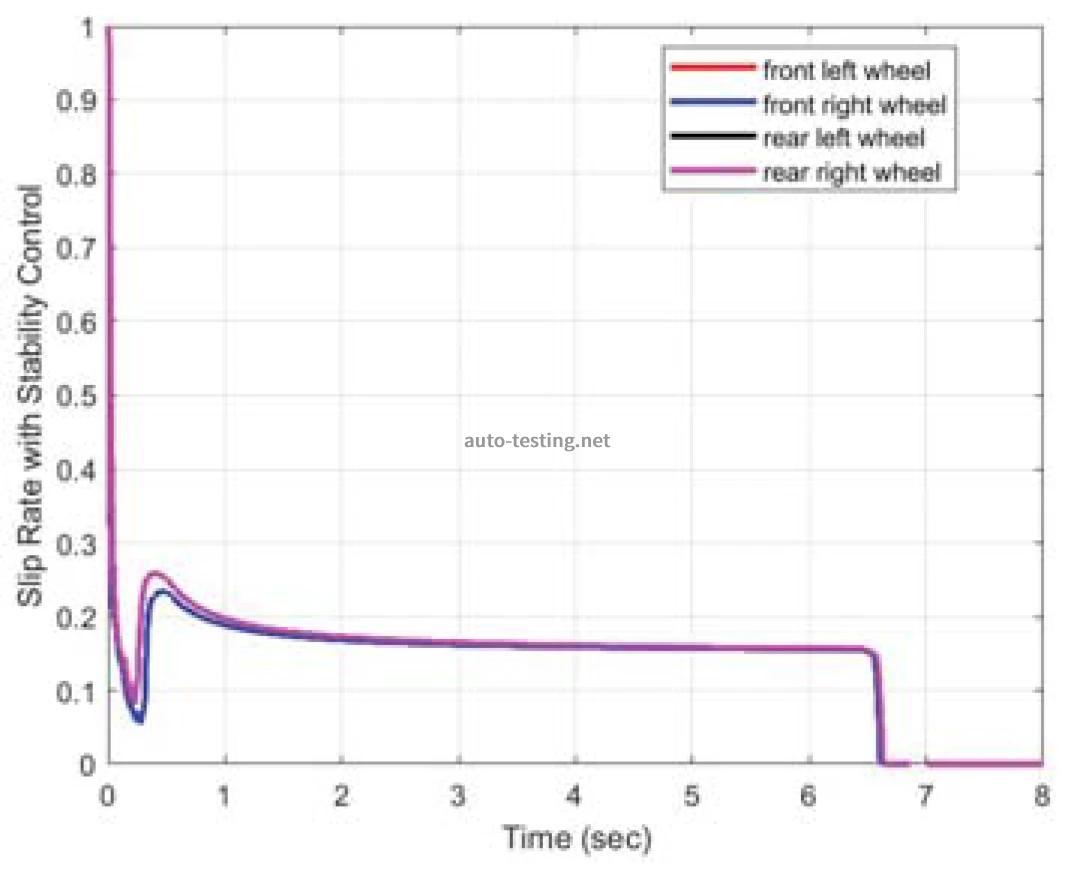
(c)稳定性控制各车轮滑转率
图4 均一低附着路面工况仿真结果
B.对开路面
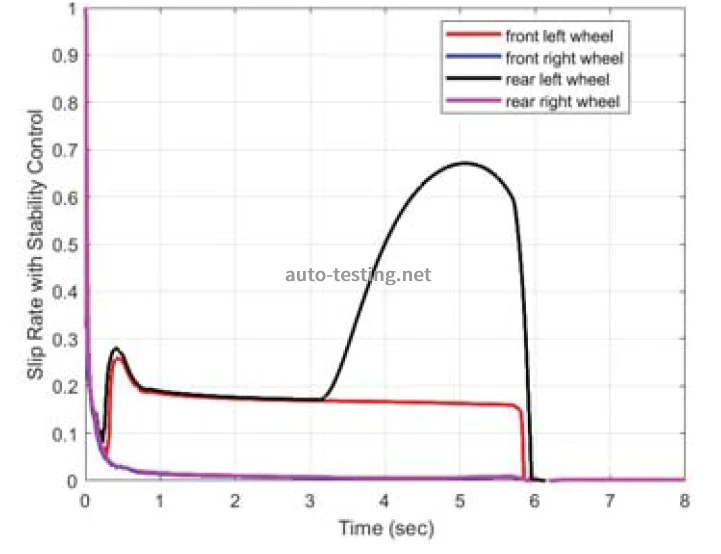
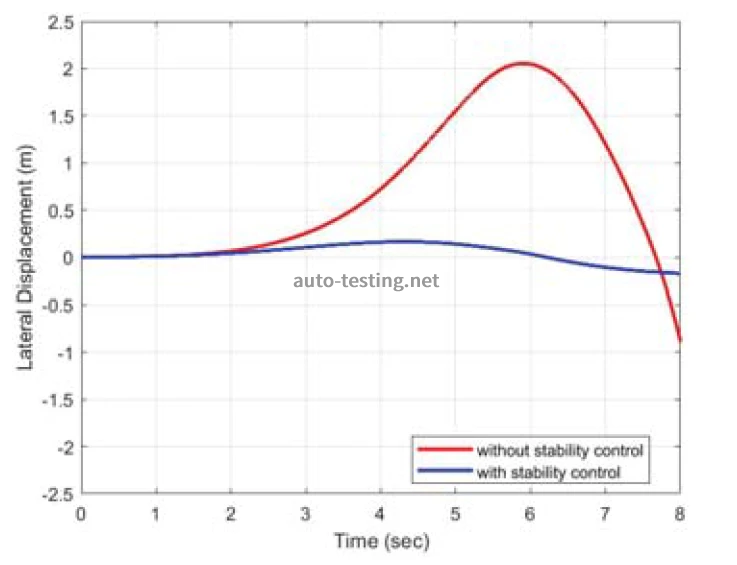
左侧路面附着系数设置为0.2,右侧路面附着系数设置为0.8,期望速度为40km/h,车辆从静止状态加速。仿真结果如图5所示。当没有施加稳定性控制时,车速在6.1秒后迅速下降。此时,车辆已经失稳,发生严重的侧向运动和横摆运动。右前轮和右后轮分别在4.16秒、4.42秒进入左侧的低附着路面,滑转率迅速增大。在采用稳定性控制后,车速超调较小,很快就会稳定在期望值,这可以通过设置更长的模拟时间来看出。右车轮一直在高附着力路面上行驶,所以它们的滑转率一直保持在较低水平。左后轮的滑转率在3.25秒有所上升,这是由于采用双侧调节方式来分配横摆修正力矩造成的。虽然左后轮的滑转率增加了,但其他车轮的滑转率都稳定在较低水平,因此整车的稳定性仍然得到保证。上述结果表明,所提出的控制策略在对开路面上有良好的控制效果。
(a)车辆速度
(b)侧向位移
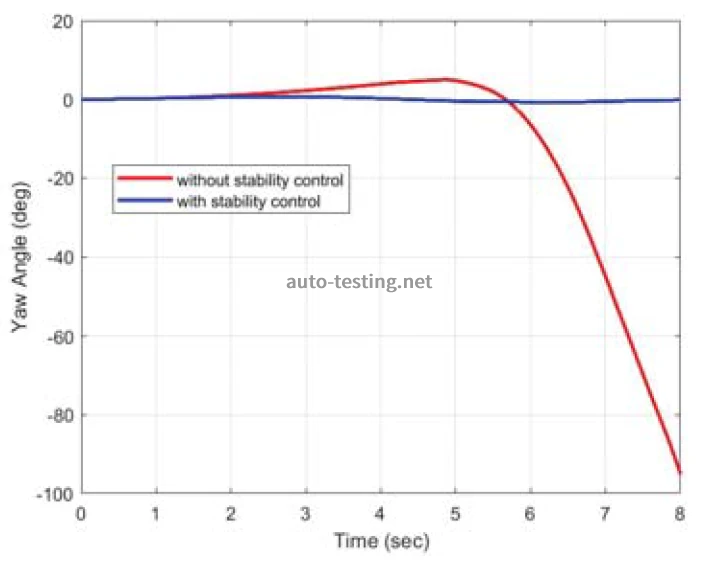
(c)横摆角
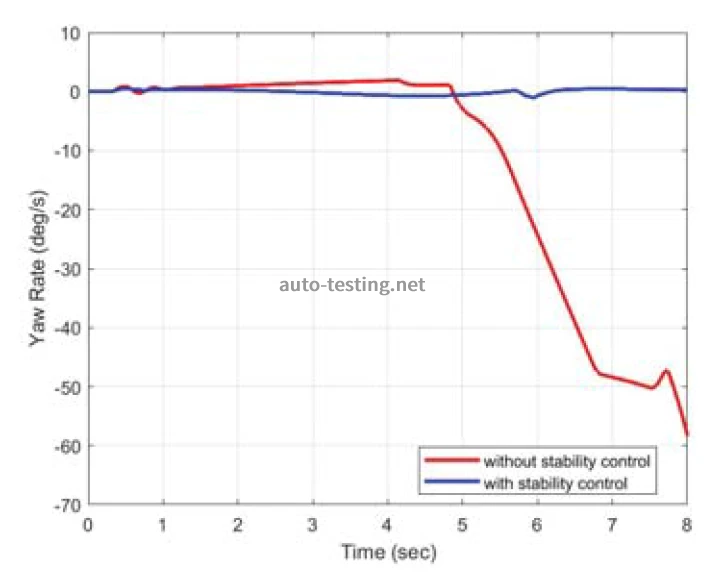
(d)横摆角速度
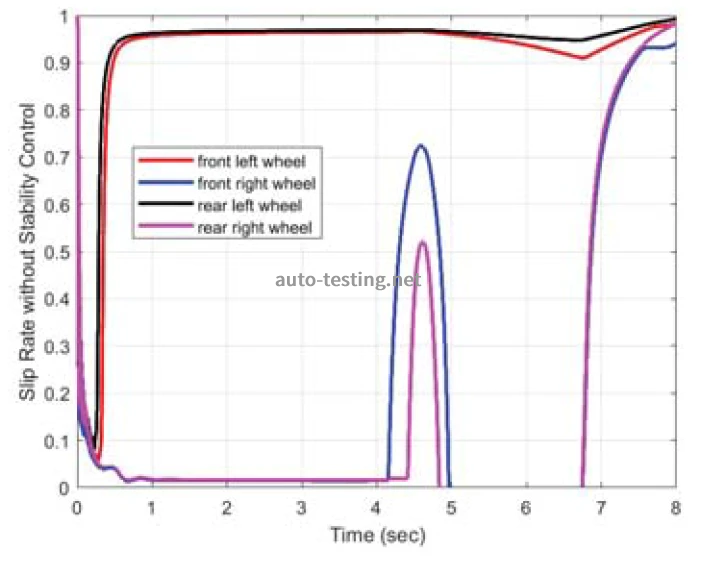
(e)无稳定性控制各车轮滑转率
(f)有稳定性控制各车轮滑转率
图5 对开路面仿真结果
VI 结论
本文为了提高4WID电动汽车在低附着路面上直线行驶时的稳定性,提出了一种新的滑模控制策略。基于滑模控制的附加横摆力矩控制器以横摆角、横摆角速度和侧向位移为控制量,能够快速有效地纠正车辆的跑偏。此外,设计了一种基于PID的滑转率控制器,以提高车辆的稳定裕度和抗干扰能力。Carsim-Simulink联合仿真验证了所提出的控制策略的有效性,车辆在均一低附着力路面和对开路面上都具有良好的直线行驶稳定性。所涉及的控制策略仅在仿真环境中进行了验证。考虑到车辆在实际环境中行驶的复杂性,未来将在实车上进行进一步验证。
参考文献



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
