




 广告
广告





















































法规标准-GB/T 33577标准解读(2017版)


作者:王文林 | 奇瑞自动驾驶产品经理
本文获作者授权
GB/T 33577是做什么的?
GB/T 33577全名为智能交通系统-前方车辆碰撞预警系统(FVCWS)-性能要求和测试步骤,其中主要是对FVCWS系统的功能要求、性能要求及测试步骤进行了介绍。由于ISO 15623-2013内容与本法规内容相同,故可沿用此法规内容
FVCWS功能分类
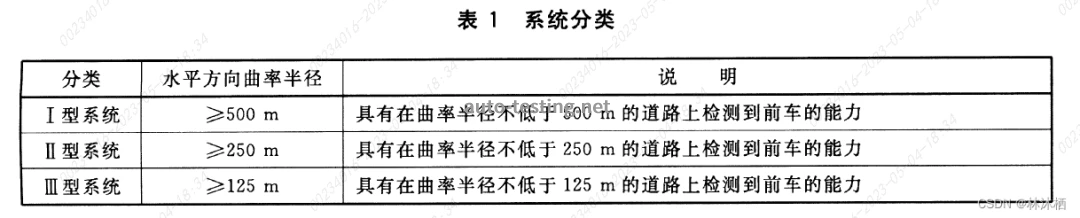
按曲率半径分类
功能要求
系统功能
车辆前向碰撞预警系统的主要功能是自车与牵扯存在潜在碰撞风险时,向驾驶员发出报警。系统通过以下信息来实现:
1)自车与前车的相对距离
2)自车与前车的相对速度
3)前车是否位于自车的前方运动轨迹上
必要功能
配有车辆前向碰撞预警系统的车辆应能实现以下功能:
1)检测前车的存在
2)确定探测到的前车相对于自车的相对位置及位置的动态特性
3)确定自车的车速
4)估计自车的运动轨迹
5)根据车辆前向碰撞预警系统的功能及要求向驾驶员发出报警
状态机
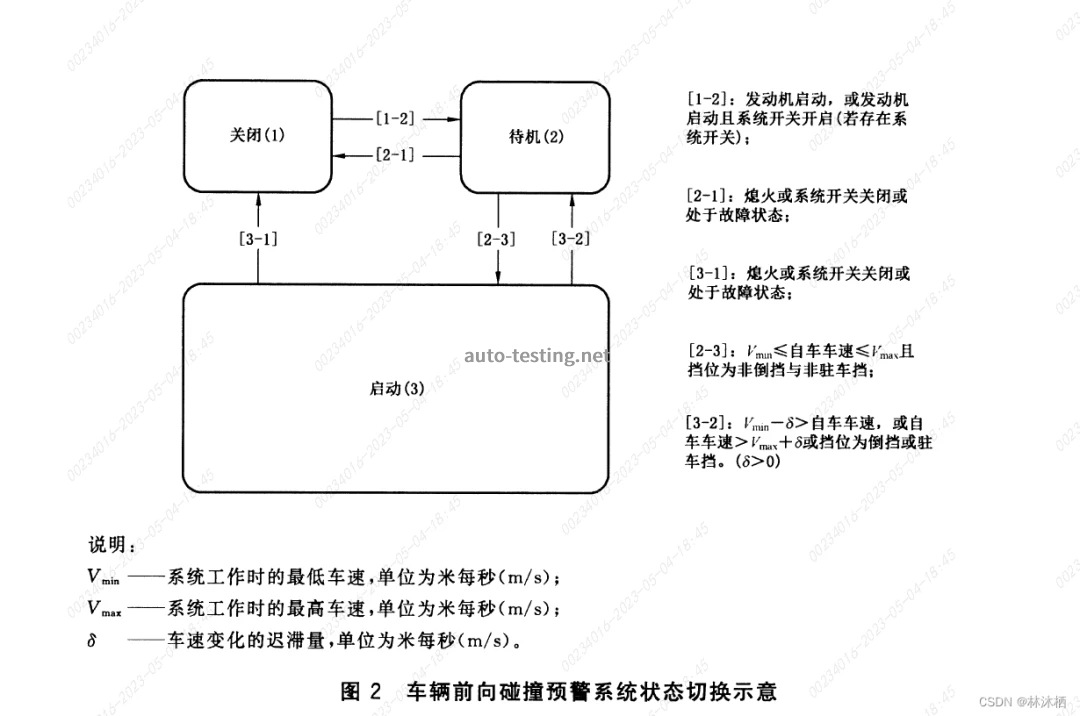
系统关闭
当车辆前向碰撞预警系统处于关闭状态,将不会进行报警。在这个状态下,可以向驾驶员提供一个除了打开点火开关以外的启动系统的其他途径(如:设置一个系统开启/关闭的开关)
当点火开关被置于关的挡位时,车辆前向碰撞预警系统切换至系统关闭状态。当系统故障检测单元检测到系统不能正常工作时,系统进入故障模式,系统被切换至关闭状态
系统待机
当车辆前向碰撞预警系统处于待机状态,将不会进行报警。在这个状态下,系统检测自车的车速及挡位状态。如果自车车速在系统工作的车速范围内,且挡位选在前进挡(除了倒档及驻车挡以外的其他挡位),系统将从待机状态切换到启动状态。当点火周期完成,发动机开始工作之后,或当发动机正在工作,驾驶员手动启动了系统开关,系统将从关闭状态切换到待机状态。当自车车速不在车辆前向碰撞预警系统的工作速度范围(考虑了车速变化的迟滞量δ)内,或驾驶员将挡位切换到倒档、驻车挡时,系统将从启动状态退出,进入待机状态
系统启动
当车辆前向碰撞预警系统处于启动状态,如果报警条件满足,则系统将发出报警命令。只要车辆挡位处于任意前进挡,且车速在系统的工作范围以内,车辆前向碰撞预警系统将进入此状态
工作限制条件
系统工作时的最低车速Vmin应不高于11.2m/s。系统工作时的最高车速Vmax应不低于27.8m/s或车辆能够达到的最高速度。相对车速的最小值应不高于4.2m/s,最大值应不低于20m/s
报警功能
报警目标对象
车辆前向碰撞预警系统针对运动的障碍车辆(包括“曾被检测到在运动,但当时停止”)应能够提供报警,而针对静止的障碍车辆则是可选择的
检测自车与障碍车辆间的距离及相对速度
前方障碍车辆的相关信息可由障碍探测装置(如光学雷达、无线电波雷达及摄像头等)检测
判断距离碰撞时间
根据自车的速度,与障碍车辆之间的距离及相对速度可以预估出距离碰撞时间。如果系统同时检测到多辆障碍车辆,则系统应自动选择自车行驶轨迹上将最快追上的障碍车辆
预碰撞报警及碰撞报警
1.车辆前向碰撞预警系统可以提供两种不同报警内容:预碰撞报警及碰撞报警。预碰撞报警的目的是告知其前方存在障碍车辆。在这种情况下驾驶员应准备采取必要措施避免碰撞。碰撞报警是告知驾驶员应采取必要措施避免碰撞
2.报警方式可选择单独或综合使用视觉、听觉和/或触觉方式。碰撞报警中,在使用视觉的同时,必须使用听觉和/或触觉报警方式告知驾驶员
3.报警应由以下因素决定:自车和障碍车辆之间的相对速度、车间距离及自车车速、驾驶员对报警的反应时间及自车与障碍车辆可能存在的制动减速度
4.当自车正在接近障碍车辆时,报警的距离应由特定参数的阈值决定(如距离碰撞时间TTC)
故障指示
在系统启动或操作过程中检测到故障时,驾驶员应被告知
报警要求
系统输出
车辆前向碰撞预警系统应能向驾驶员发出碰撞报警,另外可以发出预碰撞报警
报警形式
车辆前向碰撞预警系统的报警形式应满足以下要求:
1)碰撞报警应包含一种视觉报警及一种听觉和/或触觉报警,其中触觉报警可以采用安全带预警的方式实现;
2)预碰撞报警应包含视觉或听觉或两者组合的报警形式,可以选择触觉形式作为补充;
3)如果自车驾驶员正在采取制动操作,建议不要采取制动报警的形式向驾驶员报警;
4)如果自车正在自动施加制动力,碰撞报警及预碰撞报警中可以采取制动报警的形式;
5)制动报警的持续时间应不超过1s,所产生的减速度应不超过0.5g,该报警过程中产生的车速下降范围应不超过2m/s。同时,为保证制动报警的有效性,应满足平均减速度不低于0.1g,持续时间不低于100ms的要求;
6)听觉报警提示音量应选择合理,清晰可辩,应可以区分与前撞危险不相关的其他报警(如横向危险报警)
要求减速度的阈值
车辆前向碰撞预警系统所涉及的要求减速度的阈值应满足如下要求:
1)若要求减速度αreq超过其阈值范围,车辆前向碰撞预警系统应发出碰撞报警;在干燥路面及温暖气候条件下,αreq阈值应不超过0.68g
2)若车辆前向碰撞预警系统的报警时机可以由驾驶员进行调整,则至少其中应有一种设置能够满足以上一种关于要求减速度αreq的阈值要求
3)当要求减速度的阈值较低时,车辆前向碰撞预警系统可以发出预碰撞报警
4)碰撞报警及预碰撞报警的要求减速度的阈值可以根据道路条件、环境、驾驶员状态、驾驶员特性及不同的驾驶场景调整
响应时间
车辆前向碰撞预警系统涉及的响应时间的取值应满足如下要求:
1)在报警范围的计算中,应考虑驾驶员对报警的反应时间Tresp,该值不小于0.8s;
2)在要求减速度αreq的计算中,应考虑制动系统响应时间Tb,制动系统响应时间由系统设计者选择
3)若自车驾驶员正在制动,驾驶员对报警的反应时间Tresp及制动系统响应时间Tb应被设置为0
不报警条件
车辆前向碰撞预警系统应在如下条件下抑制或延迟报警:
1)若自车减速度大于等于要求减速度αreq的阈值,车辆前向碰撞预警系统不应发出任何报警
2)在满足系统定义的曲率半径的道路上,车辆前向碰撞预警系统不应对不在自车车道内的前车发出任何报警
3)若前车切入自车前方并车速高于自车,建议车辆前向碰撞预警系统不发出任何报警
4)若自车驾驶员正在制动,车辆前向碰撞预警系统可以一直或延迟报警
5)若距离碰撞时间TTC大于4.0s,车辆前向碰撞预警系统可以抑制或延迟报警
6)若自车正在进行换道或高动态的操纵行为,或者若自车驾驶员正在通过加大油门来抑制车辆的驾驶辅助系统主动施加的制动力,或者若自适应巡航系统正在施加最大的制动报警,车辆前向碰撞预警系统可以一直或延迟报警
7)若驾驶工况不满足工作限制条件,车辆前向碰撞预警系统可以抑制或延迟报警
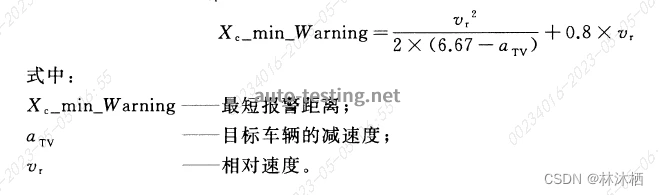
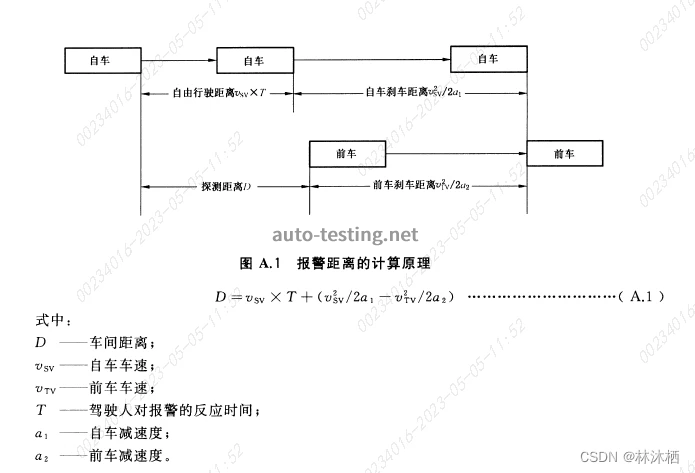
报警距离范围计算示例
最短的期望报警距离可以使用如下公式计算,可以假定驾驶员对报警的反应时间Tresp=0.8s,要求减速度αreq=6.67m/s2
其他报警触发方式
对于使用其他报警触发方式(如TTC、或ETTC)的系统,报警触发时机需要满足报警要求
障碍车辆检测区域及性能要求
障碍车辆检测区域
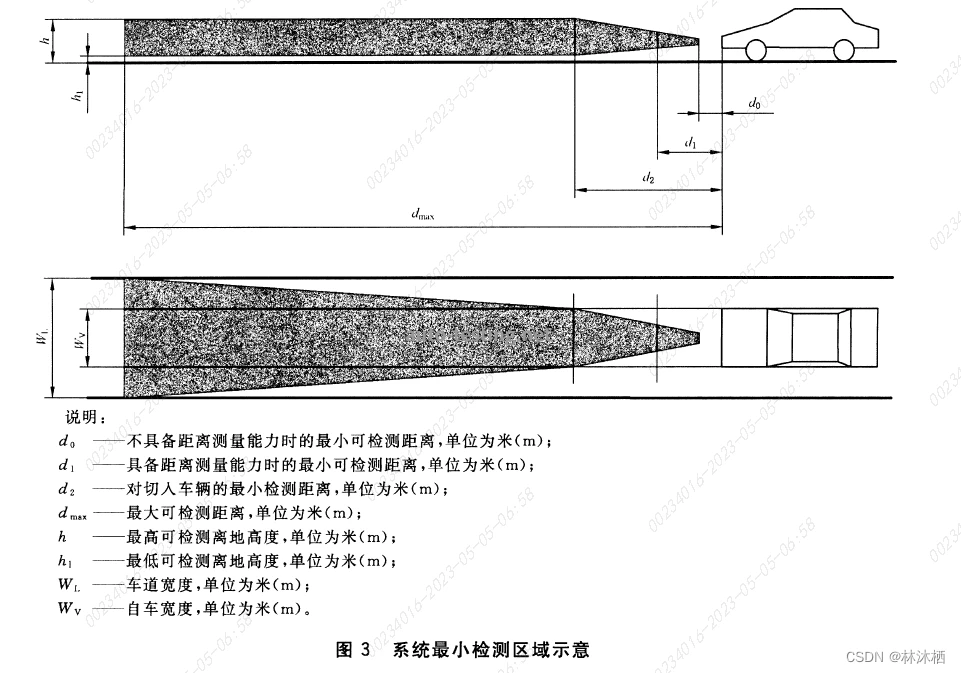
最小检测区域
系统的最小检测区域如下图所示:
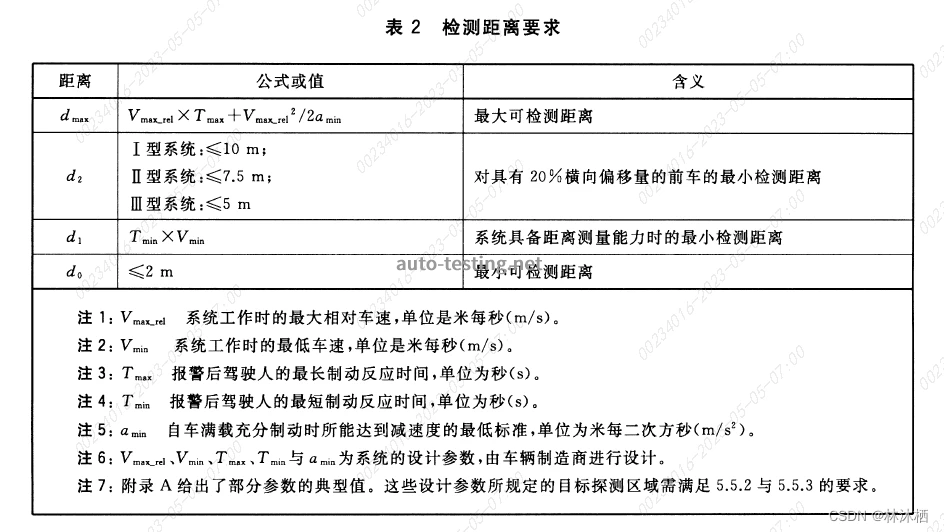
检测距离
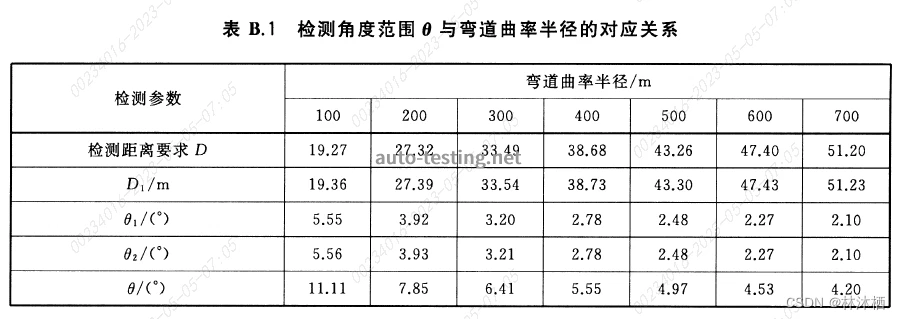
系统的检测距离要求见下表:
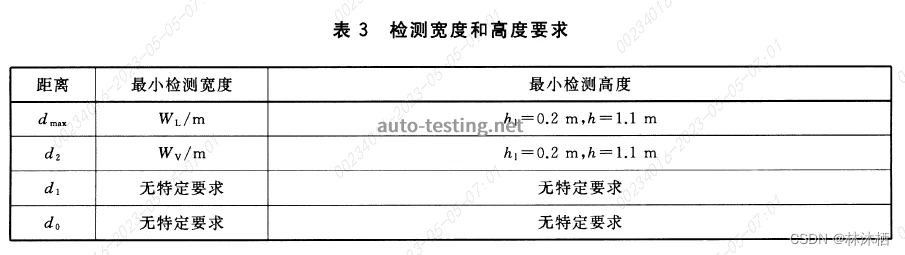
检测宽度和高度
系统的检测宽度和高度要求细则如下:
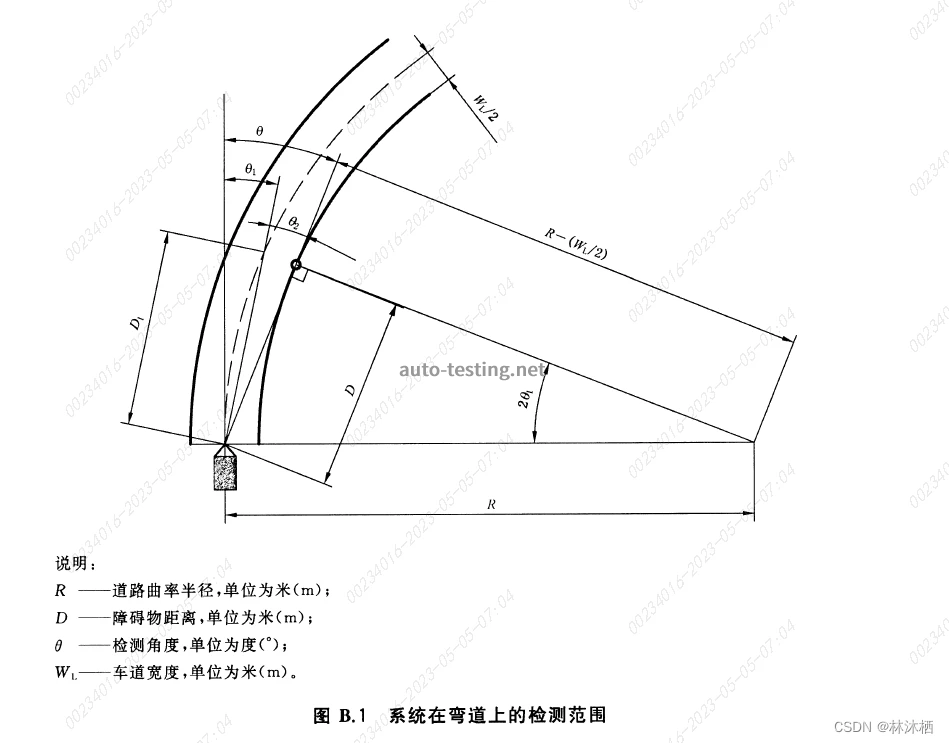
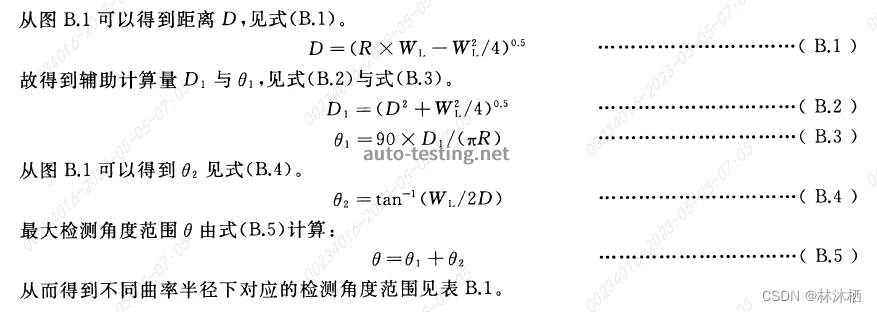
水平弯道上的检测范围要求
能够进行弯道障碍物识别的系统在弯道上障碍物检测范围如下:
报警距离精度
非自适应系统的报警距离的误差应当在±2m或15%范围之内。对这一条件的重复性试验需要保证同样的初始测试条件,避免可能出现的系统性能偏差。自适应的车辆前向碰撞预警系统是指,系统的报警时机不仅取决于自车及目标车辆的相对运动状态,还受其他参数的影响。其他参数包括:道路条件、环境、驾驶员状态、驾驶员特性及驾驶场景等。由于工作原理的不同,自适应系统的性能可以不满足该项对报警距离精度的要求
目标识别能力
纵向识别能力
如果自车前方检测区域内(即距离d1到dmax内)有两辆或者更多障碍车辆,系统应有能力选择位于自车行驶路径上且将最快追上的车辆并进行报警
横向识别能力
如果自车行驶路径上或相邻车道上有两辆或者更多障碍车辆,系统应有能力选择位于自车行驶路径上的车辆进行报警
邻近区域干扰物识别能力
如果道路上方、下发或路侧存在干扰识别的障碍物,比如架空交通标志、道路井盖、减速带、建筑物等,系统应有能力排除此类障碍物,不进行报警
弯道性能要求
I型车辆前向碰撞预警系统应能对半径大于或等于500m的弯道上存在的障碍车辆进行报警
II型车辆前向碰撞预警系统应能对半径大于或等于250m的弯道上存在的障碍车辆进行报警
III型车辆前向碰撞预警系统应能对半径大于或等于125m的弯道上存在的障碍车辆进行报警
用户安全需求
车辆前向碰撞预警系统需要通过传感器获取前车的信息(如相对距离、相对车速等),当采用不同的传感器时,需要满足一定的安全性能要求:
光学雷达
光学雷达应按照GB 7247.1-2012中第一类激光的规定
无线电波雷达
无线电波雷达应符合工信部发布的【2005】423号文件车辆测距雷达的规定
用户界面需求
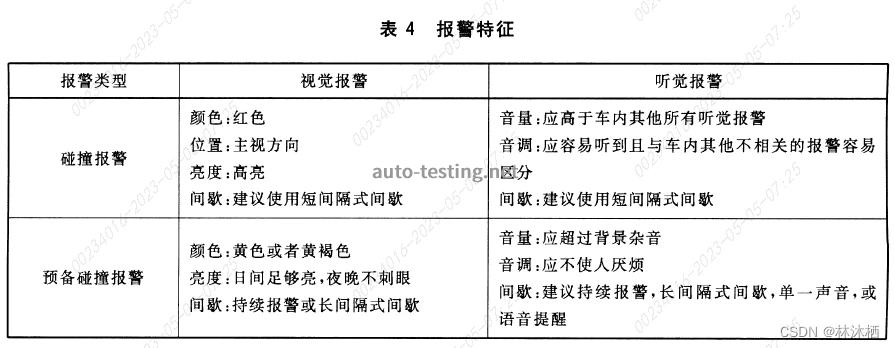
报警方式
报警方式中,视觉、听觉方式的报警特征见下表:
干扰报警要求
如果自车同时安装有前向碰撞预警系统和其他报警系统(如后方或侧面的障碍报警),则驾驶员应能清楚辨别车辆前向碰撞预警系统所发出的报警
工作状态指示
系统工作指示
应提供告知驾驶员系统工作的指示(如带指示灯的电源开关)
系统故障指示
应提供告知驾驶员系统故障的指示(如仪表板上的故障指示)
系统局限性告知
应通过用户手册或警告标签等适当方式告知驾驶员系统局限性
性能测试方法
测试目标要求
根据相应传感器选择对应测试目标
——光学雷达:
1.测试目标需根据表示车辆的反射率的CTT(测试目标系数)而定。CTT应为2m2/sr
2.CTT描述反射物的性能。测试过程中需要一个角形发射器(将一个平面减小到一个点)。也可以使用大平面反射器,只要其反射率不超过2m2/sr
——无线电波雷达
1.测试目标由一般机动车的雷达截面积(RCS决定).RCS值为3m2
——视觉传感器
1.测试目标需要具有代表性的乘用车辆或客运车辆的物理尺寸、形状和表面轮廓
检测区域的测试方法
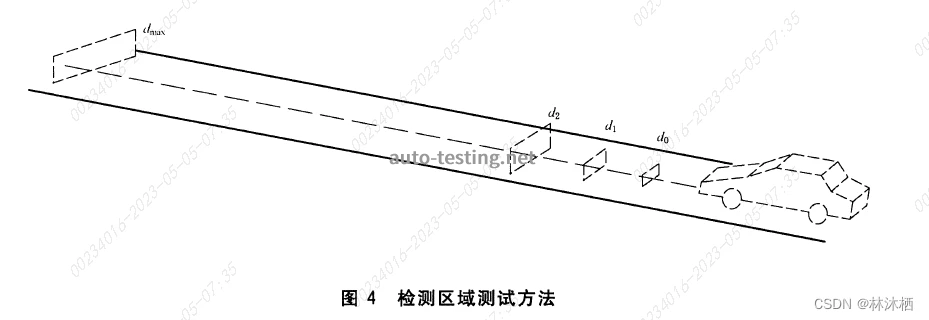
检测区域的理想测试方法为动态测试,但静态测试方法可作为一种选择。测试按以下要求进行:
1)系统应检测位于d0和d1间任意位置的测试目标,d0和d1相对于自车的位置见下图。d0和d1间不需要进行距离测量
2)系统应检测位于d1和d2间任意位置的测试目标,d1和d2相对于自车的位置见下图。d1和d2间需要进行距离测量
3)系统应检测分别位于d2和dmax处的两个测试目标,d2和dmax相对于自车的位置见下图,测试过程依次进行
报警距离范围及精度的测试方法
报警距离范围测试
目标车辆与自车在同一直线车道上行驶,目标车辆车速控制在(8±1)m/s,自车车速控制在(20±2)m/s。发出报警时的车距应大于等于Xc_min_Warning【见报警距离范围计算示例】
报警距离精度测试
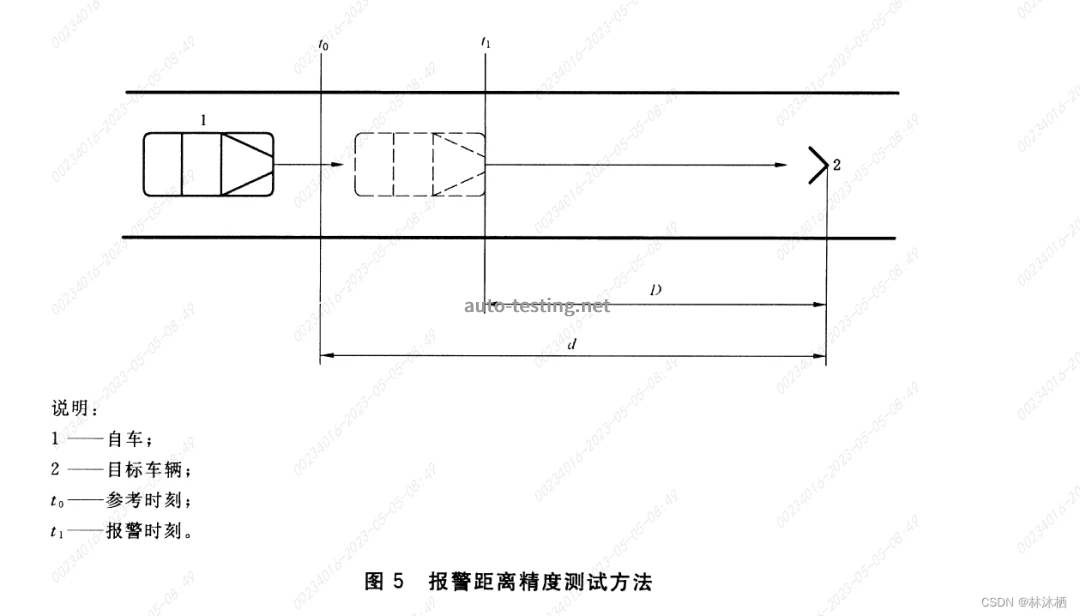
1.该测试需在车辆行驶过程中进行,目标车辆需在检测区域内。当自车以速度V=20m/s朝目标车辆行驶时,需按以下步骤测量报警距离
2.需测量两个时刻,如图所示,第一个时刻为自车和目标车辆的车间距离为d的时刻t0,第二个为报警时刻t1,故报警距离的计算公式为D=d-Vx(t1-t0),用该计算结果与制造商所设定的报警距离进行比较,在重复性测试中,报警距离精度需在70%以上次数的测试中达到报警距离精度的要求(±2或15%)
目标识别能力的测试方法
纵向静止前车识别能力测试
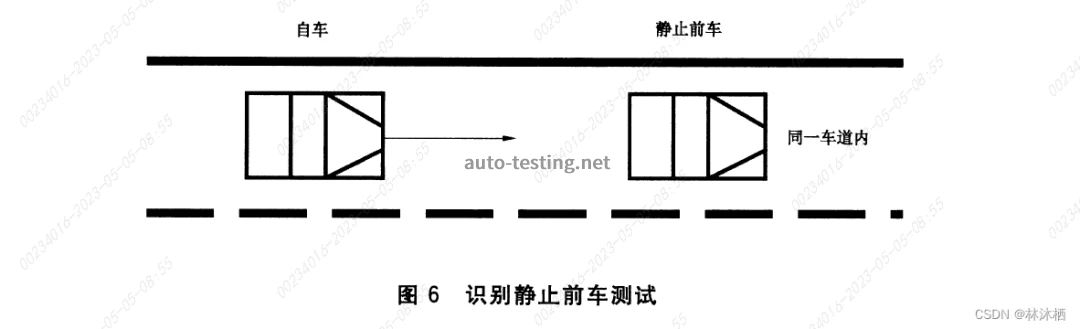
该试验用以评估系统对单一前车的识别能力。测试工况如图所示,前车停在车道中心,纵轴方向与道路边缘平行,且前车与自车朝向一致,自车向前车尾部接近。自车以额定速度20m/s在车道中心朝前车行驶,系统应能够在TTC最小微2.1s时发出报警,当自车距离前车150m时试验开始,下面任意一种情况发生时,试验结束:
a)系统发出报警
b)TTC降至小于系统报警最小允许值的90%时(如TTC=1.9s)。
试验后,自车应转向(推荐使用)和/或制动以避免自车撞上前车
纵向减速行驶前车识别能力测试
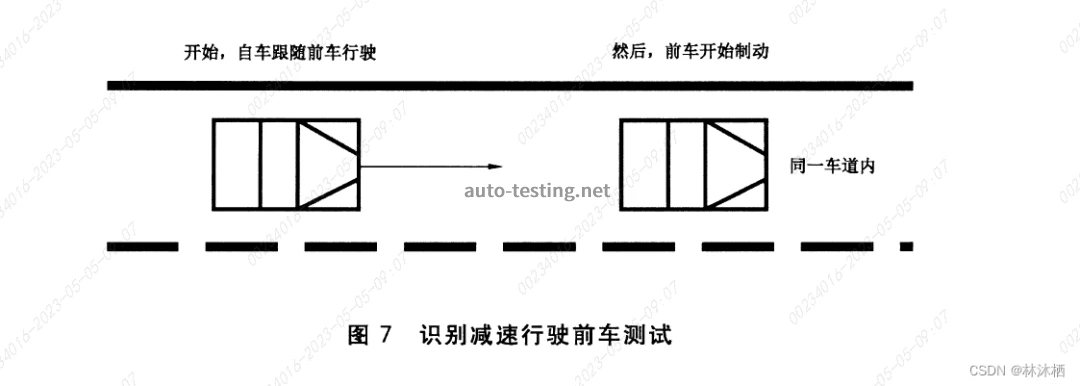
测试工况如图所示,该试验中自车和前车以20m/s的恒定速度在平直车道中间行驶。在前车开始制动前,自车与前车间距保持在30m。前车以0.3g的恒定减速度进行制动,系统应能够在TTC最小为2.4s时发出报警。当下面任意一种情况发生时试验结束:
a)系统发出报警
b)TTC降至小于系统报警最小允许值的90%时(如TTC=2.2s)
试验后,自车应转向(推荐使用)和/或制动以避免自车撞上前车
纵向低速行驶前车识别能力测试
测试工况如图所示,前车以9m/s的恒定速度沿车道中心行驶,自车以20m/s的恒定速度在车道中心朝低速行驶的前车行驶,系统应能够在TTC最小为2s时发出报警。当自车距离前车150m时试验开始,下面任意一种情况发生时试验结束:
a)系统发出报警
b)TTC降至小于系统报警最小允许值的90%时(如TTC=1.8s)
试验后,自车应转向(推荐使用)和/或制动以避免自车撞上前车
纵向多目标工况下的识别能力测试
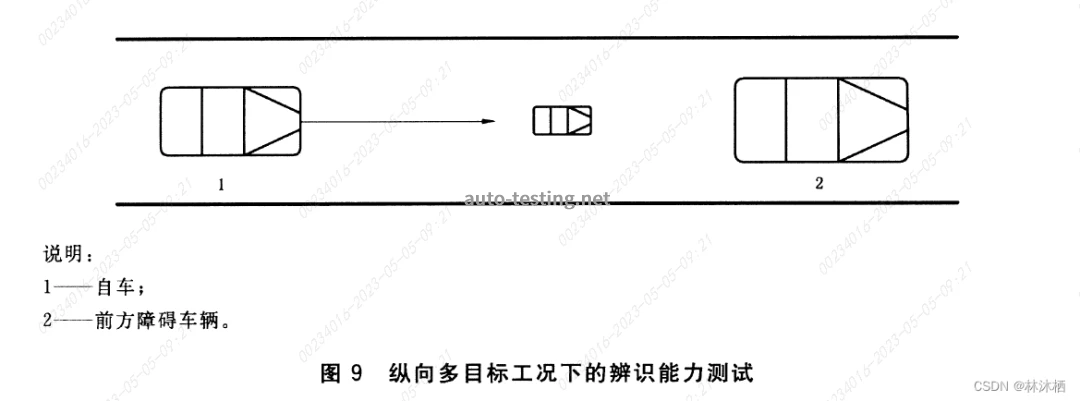
测试工况如图所示,两辆前车在检测区域以相同速度20m/s行驶,自车以20m/s的车速在正后方尾随行驶。两辆目标车的车头时距应为Tmin(0.6s±0.1s),且距离自车较近的目标车辆不能遮挡距离较远的障碍车辆。自车和距离较近的目标车辆的车头时距应大于Tmax(1.5s)。自车加速至系统发出碰撞报警,然后自车开始减速使两车车头时距大于1.5s,再次以相同的车速跟随目标车辆,以该速度保持匀速行驶。几秒之后,距离较近的目标车辆开始减速,使自车可以再次发出碰撞报警。自车开始报警时测试结束
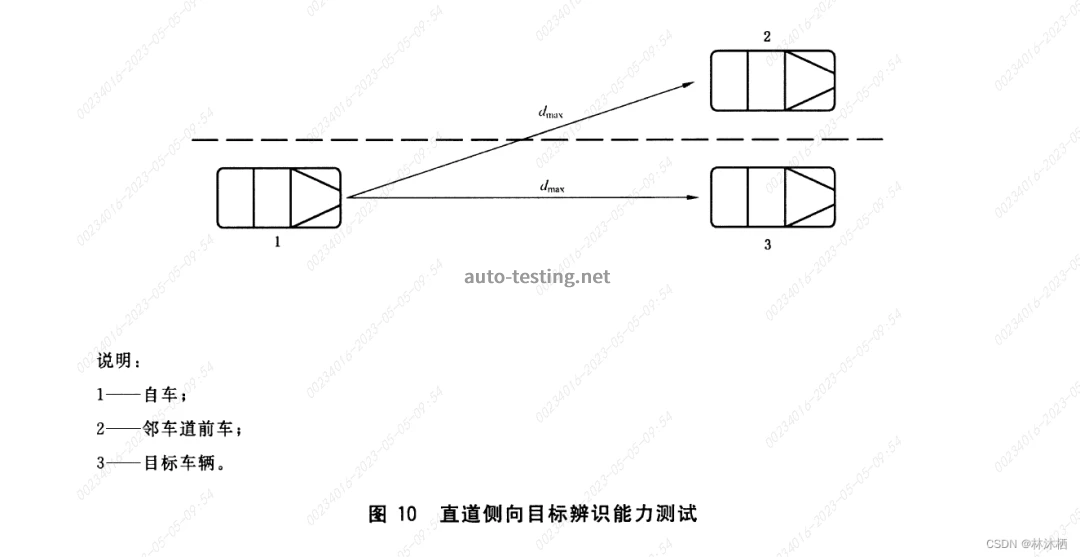
直道横向目标识别能力测试
该测试应采取动态测试方法。测试工况如图所示,自车和目标车辆以相同的速度20m/s行驶,且车间距离不会触发报警。一辆前车以相同速度在目标车辆相邻车道行驶,前车与目标车辆的纵轴间距为3.5m±0.25m,车宽应为1.4m-2m,自车纵轴相对于目标车辆纵轴横向位移应小于0.5m,几秒钟后,相邻车道的前车减速至明显低于自车与目标车辆的速度,在自车超过相邻车道前车时系统不应发出报警,然后目标车辆减速至系统能发出预碰撞报警的速度,当自车开始报警时测试结束
弯道横向目标识别能力测试
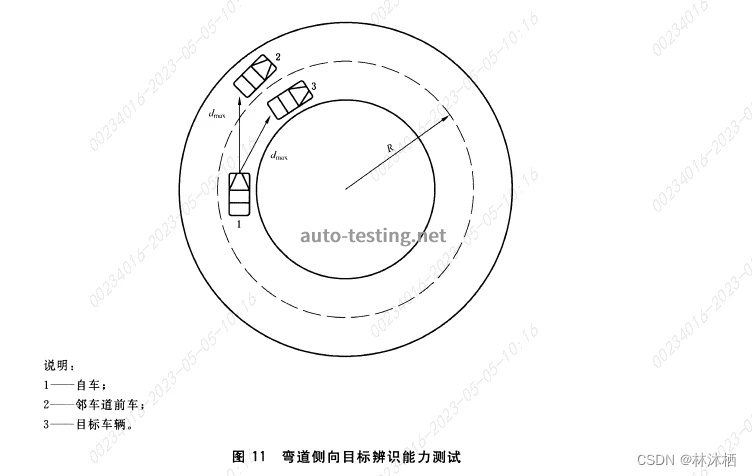
该测试需在弯道上进行,测试场地需足够长,且对I型系统需包括半径≤500m的弯道,对II型系统需包括半径≤250m的弯道,对III型系统需包括半径≤125m的弯道,此测试必须动态进行。测试工况如图所示,自车和目标车辆已相同速度在同一车道内同向行驶,且车间距离不会触发报警。测试开始时测试车辆的初始速度见以下公式:

I型系统取αlateral_max=2m/s2;
II型和III型系统取αlateral_max=2.3m/s2;
在目标车辆外侧车道有一辆前车正在行驶,几秒钟后,邻车道前车减速至明显低于自车和目标车辆的速度,在自车超过它的过程中,系统不应报警。然后目标车辆减速至自车能发出碰撞报警的速度。当自车开始报警时测试结束
上方目标识别能力测试
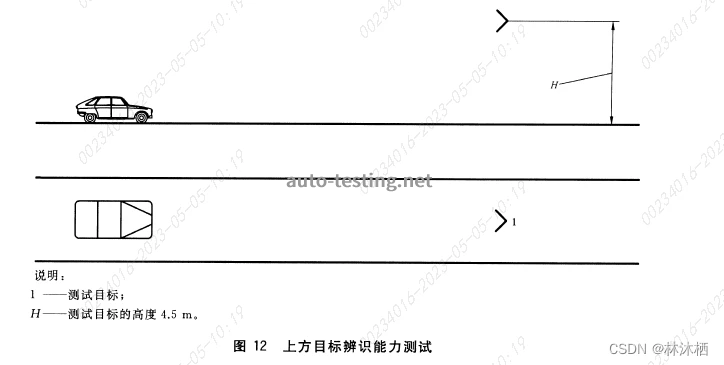
该测试应采用动态测试方法。测试工况如图所示,设置可能引起误报警的测试目标。自车朝测试目标行驶,并从目标下驶过。若自车上的系统未发出报警则测试结束。根据JTG B01-2014的2.0.7中对道路净空高度的规定,测试目标的高度设计为四级公路的净空高度4.5m
下方目标识别能力测试

该测试应采用动态测试方法。测试工况如图所示,设置可能引起误报警的测试目标,如减速带、井盖,干扰障碍物高度设计为5cm。自车朝测试目标行驶,并从目标上方驶过。若自车上的系统未发出报警则测试结束
路侧目标识别能力测试
该测试应采用动态测试方法。设置一测试路段,道路两侧有房屋、阴影区、道路指示标志这些可能引起系统误报警的路测目标。自车以系统工作范围内的车速匀速行驶通过该路段,若自车上的系统未发出报警则测试结束
碰撞报警计算
进行系统设计时,使用以下参数计算Dmax与d1:
Tmax=1.5s;
Tmin=0.4s;
αmin=3.6m/s2;
权声明:本文为CSDN博主「林沐栖」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:
https://blog.csdn.net/weixin_50875614/article/details/130418256



 广告
广告




最新资讯
-
东扬精测系统参展第六届宁德国际新能源电池
2025-03-18 14:14
-
褚教授邀您来上课 | 4月15日工作变形分析(O
2025-03-18 13:55
-
直播|Adams多体动力学模型优化 (Femfat L
2025-03-18 13:54
-
【3.27线下报名】罗德与施瓦茨汽车电子测试
2025-03-18 13:53
-
从能量角度分析越野车的机动性——减振器(
2025-03-18 13:52
