




 广告
广告





















































智能网联汽车测试策略研究(下)

鉴于自动驾驶系统(Automated Driving System, ADS)和交通环境的复杂性以及安全事件的偶发性,自动驾驶系统需要安全、可靠地处理由外界和自身变化带来的多种不确定性,才能有效保障智能网联汽车安全合规地行驶,并逐步提升舒适性和智能性。因此,在智能网联汽车开发设计流程中,测试验证评价是必不可少的环节——这需要基于智能网联汽车的设计运行条件(Operational Design Condition,ODC)、安全边界及最小风险策略等,对自动驾驶功能开展全面的测试验证工作。[1]
为确保智能网联汽车产品测试方案的可行性和测试结果的一致性,以及合理调配测试资源、有效降低测试成本,赛目科技参考国内外相关法规和技术标准,基于长期积累的智能网联汽车测试经验,提出智能网联汽车产品测试策略——构建场景集,解决智能网联汽车产品测试“测什么”的问题;提出智能网联汽车测试场景和“三支柱”的匹配方法,解决智能网联汽车产品测试“怎么测”的问题。
本系列文章将分上、下两篇,分别阐释赛目科技提出的测试策略研究如何解决智能网联汽车测试“测什么”和“怎么测”两个核心问题。
怎么测?
场景与“三支柱”测试方法匹配
为了合理规划测试工作排期和测试工作量,对已经生成的场景集要合理的与三支柱方法进行适配,并确定具体的测试策略,其中,明确测试场景与“三支柱”测试方法的映射关系是重中之重。
1、场景与“三支柱”测试匹配分析的基本思想
模拟仿真测试、封闭场地测试和实际道路测试共同构建形成完备的测试评估体系,以支撑智能网联汽车安全要求验证确认。场景与“三支柱”测试匹配分析主要需考虑场景可行性和测试方法可行性:
-
场景可行性
首先,需要考虑场景本身的安全性。若已识别出的边缘场景、危险场景和失效场景存在威胁驾驶员人身安全或严重影响道路交通安全的潜在风险,则应首先在模拟仿真环境中进行测试,确认最小风险准则可接受,再另行考虑是否进行封闭场地测试或实际道路测试。
其次,出于测试成本方面的考量,应尽可能的精简封闭场地测试和实际道路测试的场景。基于模拟仿真遍历测试,测试敏感性分析、连续场景通过性分析,筛选封闭场地测试的典型场景下的典型测试用例,筛选实际道路测试中需要测试的连续场景以及典型交通条件。
-
测试方法可行性
一方面需考虑测试的可重复性。模拟仿真测试可重复性高[2],封闭场地可以适当控制交通环境,而实际道路测试中场景与环境完全随机,场景重复性低。因此,应在模拟仿真测试中对同一个功能场景进行尽可能多地遍历参数组合,在封闭场地测试中选择典型用例进行测试,而在实际道路测试中,主要考虑真实交通场景中是否包含期望的场景要素,以及测试里程的积累。
另一方面需考虑测试环境的真实性。实际道路测试的真实性高于封闭场地测试,模拟仿真测试尽管可以使用硬件在环、整车在环等虚实结合的方式,但测试环境仍是数字模拟的虚拟场景。[3]因此,若存在ADS在某些场景下通过性易受自然环境、整车状态、驾驶员状态、交通环境影响,则必需在物理世界进行测试,即此类场景必需进行封闭场地测试或实际道路测试。
-
三支柱测试基本思想
模拟仿真测试以高可信度的仿真工具链为支撑,充分发挥其在测试执行效率、灵活度、成本等方面的优势,对自动驾驶系统开展高覆盖度的场景测试,以评估智能网联汽车安全性,并基于测试结果识别出自动驾驶系统存在潜在风险的危险场景和边缘场景,作为封闭场地测试和实际道路测试的重要场景输入。
封闭场地测试根据其测试场景需求开展场景搭建、不确定性评估及测试工作,通过单一场景测试、组合场景测试等方式在可控的环境下对自动驾驶系统的实车表现和模拟仿真的可信度进行评估。
实际道路测试则在针对期望覆盖的场景要素集合,重点围绕测试路段、测试时长等因素制定有针对性的测试方案,并开展相关测试工作,以评估智能网联汽车在真实交通场景中的产品安全性。[1]
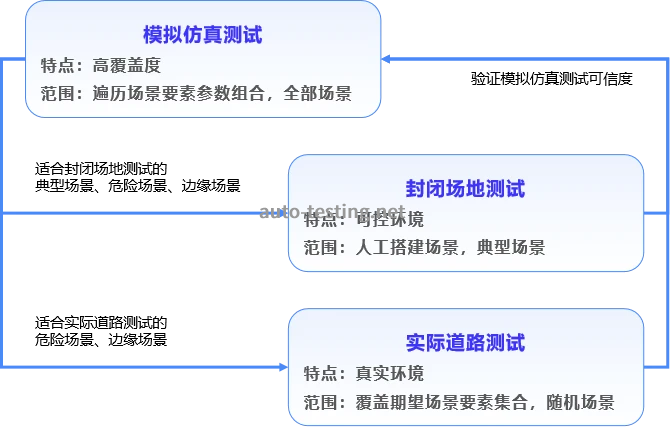
图 1“三支柱”测试流程图
2、矩阵映射法——匹配场景与“三支柱”测试方法
为了详细说明场景与“三支柱”测试方法匹配的分析思路,本文提出了一种矩阵映射法[4],通过“场景-功能”矩阵和“功能-测试方法”矩阵的映射,得到“场景-测试方法”的关系矩阵。
-
"场景-功能"矩阵
承接本系列文章《智能网联汽车测试策略研究》上篇中的场景库构建思路,通过多种分析方式,共筛选出m个需要进行测试的场景,并在ADS要素分析过程中,确定其具有的n个功能。
首先,建立m个场景与n个功能的对应关系表,该表通过定性分析ADS测试场景集中各个场景是否调用ADS各类功能可得到。表1 待测场景与ADS功能对应表
表中的 是零一变量,表示ADS在场景 运行时,ADS是否需要调动功能 ,如需调动功能 ,则 ,反之 。 将表 1写为“场景-功能”矩阵,记为: ;
-
“功能-测试方法”矩阵
同样的,建立n个功能与3种测试方法的对应关系表,该表可参考目前国内外已发布或在研的政策、法规、标准,将分析所得的对应关系填入如表2所示的ADS功能与测试方法对应表:表 2功能与测试方法对应表
表中的 是零一变量,表示为验证功能 ,是否需要进行 方法的测试,如功能 必须进行 测试,则 ,反之 。 模拟仿真测试封闭场地测试实际道路测试 (滑动查看完整公式)将表 2写为“功能-测试方法”矩阵,记为 :
-
“场景-功能”与“功能-测试方法”的映射
设“场景-测试方法”矩阵为 如上式所示,“场景-功能”矩阵 与“功能-测试方法”矩阵 相乘,可得“场景-测试方法”矩阵:其中: 如 ,说明场景 需要进行 方法的测试,如 ,说明场景 无需进行 测试。
-
测试矩阵修正
参考上文的基本思想,模拟仿真测试由于成本低、测试效率高和可重复性强,应在仿真环境中进行所有场景的测试,因此,基于此原则,可能出现如下需对“场景-测试方法”矩阵进行修正的情况:
由于模拟仿真仿真测试是封闭场地测试和实际道路测试的输入,如存在场景 ,是 但 或 ,则需要在模拟仿真环境中增加场景 测试用例。
因此需要对“场景-测试方法”矩阵 进行修正,令 ,修正后的“场景-测试方法”矩阵记为 。
综上,根据修正后的“场景-测试方法”矩阵,可得如下表3形式的测试策略表,矩阵中元素大于0,则在对应单元格中填入“必测”,元素等于0,则为填入“可选”:
表 3自动驾驶系统场景-测试方法策略表(样表)
模拟仿真测试封闭场地测试实际道路测试场景1必测/可选必测/可选必测/可选场景2 场景m
-
案例分析
以下通过一个简单案例分析,以更直观地说明场景-功能-测试映射分析法。为简化案例分析维度,该案例仅分析1个场景,考虑2个ADS功能,分析“三支柱”测试方法测试策略。
表 4案例-场景与ADS功能对应表
合理可预见
的用户误用
明确的介入请求
触发条件且可识别
前车切入有
无
表4说明在前车切入场景中,包含 合理可预见的用户误用,不包含 明确的介入请求触发条件且可识别。因此可得“场景-功能”矩阵 : 确定功能与测试方法的对应关系如下表 5:
表 5案例-功能与测试方法对应表
模拟仿真测试
封闭场地测试实际道路测试
合理可预见
的用户误用
可选
必测可选
明确的介入请求
触发条件且可识别
必测
必测可选可得“功能-测试方法”矩阵 :
因此,“场景-测试方法”矩阵为:
下图 2通过三维坐标系的形式,更为形象地解释了场景-功能-测试方法映射分析的原理:
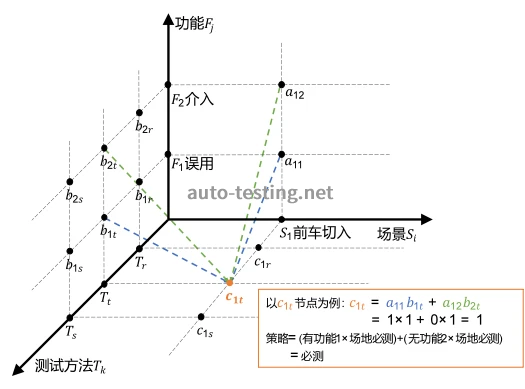
图2 案例-场景-功能-测试方法映射分析原理图‘
(点击查看大图)
因出现 但 ,则需要修正“场景-测试方法”矩阵:可得如表 6所示的测试策略表:
表 6案例-测试场景-测试方法策略表
模拟仿真测试封闭场地测试实际道路测试 前车切入必测必测可选
3、评价体系
测试评价是智能网联汽车安全上路不可或缺的重要环节。针对模拟仿真测试、封闭场地测试和实际道路测试等不同的测试阶段的测试结果,均应进行科学、全面和有效的评价。评价方法主要包括基于单一场景的评价方法和基于连续场景/里程的评价方法。
-
基于单一场景的评价方法
为考察自动驾驶系统在单一场景下的表现,建立涵盖安全性、合规性和舒适性等多维度的评价指标体系,主要涉及模拟仿真测试和封闭场地测试。基于单一场景评价方法的核心是在设计、验证和确认阶段,测试自动驾驶系统在关键测试场景中的通过性。特别的,针对模拟仿真测试,在测试前,需要证明使用的模拟仿真测试工具链的置信度、仿真模型(包括传感器模型和车辆动力学模型等)的可信度;在测试后,通过仿真和实车对比等手段,验证模拟仿真测试的可信度,确认仿真测试结果与真实物理世界测试结果的一致性。
-
基于连续场景/里程的评价方法
为考察自动驾驶系统在连续场景下的表现和长时间运行的稳定性,通过连续场景、一段连续道路,或是一片行驶区域(例如:城区路网等),即在真实的条件和环境下,或者接近于真实的条件和环境下,主要涉及模拟仿真测试和实际道路测试。
基于连续场景/里程的评价方法的核心是测试搭载自动驾驶系统的车辆是否具备完善的自动驾驶功能,以及是否会对交通产生负面影响。特别的,针对模拟仿真测试,可通过构建测试道路(包括高速/城市等),设置随机交通流等方式,评价被测自动驾驶系统在连续场景/里程的通过性。
结语
本系列文章首先从测试内容入手,提出了场景集的构建方法,根据场景数据的不同来源,分别就标准法规场景集、预期功能安全场景集、实车采集数据场景集的构建方法进行说明;随后从测试方法入手,提出了矩阵映射法,并展示了场景与“三支柱”测试方法匹配分析的实例;分别回答了智能网联汽车测试“测什么”和“怎么测”的问题。
未来,赛目科技还将从测试规模、测试评价,以及模拟仿真与场地测试对比分析等方面展开深入研究,持续完善并分享智能网联汽车“三支柱”测试方法论知识体系,敬请期待!
参考文献
[1]刘法旺, 曹建永, 张志强, et al. 基于场景的智能网联汽车"三支柱"安全测试评估方法研究 [J]. 汽车工程学报, 2023, 13(1): 7.
[2]刘法旺, 何丰, 周时莹, et al. 基于场景的智能网联汽车模拟仿真测试评估方法与实践 [J]. 汽车工程学报, 2023, 13(02): 135-45.
[3](GRVA) Proposal for a second iteration of the New Assessment/Test Method for Automated Driving — Master document [R]. Geneva: Economic Commission for Europe, 2022.
[4]白雪松, 邓伟文, 任秉韬, et al. 一种自动驾驶仿真场景要素的提取方法 [J]. 汽车工程, 2021, 43(07): 1030-6, 65.
- 下一篇:走进重庆长安研发中心:UNI-K的研发故事
- 上一篇:智能网联汽车测试策略研究(上)







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
