




 广告
广告





















































传感器、测试通道和坐标系的XYZ有啥区别?

当使用测量点数据库或使用数据记录或锤冲法等工具进行测试时,往往存在很大的不确定性,因为术语X、Y和Z有三种不同的含义,如下图所示。
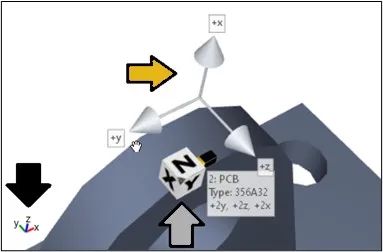
三种不同情况下的X、Y和Z
在测量数据中,哪些X、Y、Z坐标对自由度DOF的指定有贡献?
在模态分析中,按X、Y或Z过滤传函时,对应的是哪个?
当在测量点库中输入点的位置时,这些坐标代表什么?
在 "传感器数据库" 列表中,彩色的X、Y和Z表示什么含义?
01、传感器(图1中的灰色箭头)
软件显示的传感器只用X、Y和Z的代号,因为几乎所有厂家的传感器侧面都是这样的标注。方便用户视觉上确保实际的传感器和软件中的方向相同。然而,对于DOF,这些X、Y和Z并不重要。在通道列表中,还用颜色进一步区分。如果实际传感器侧面也是用颜色区分的,那就更直观了。

传感器的XYZ标签还有其他令人困惑的后果:如果你按照X=红,Y=黄,然后Z=白的顺序将数据线接头插入前端,那么就会产生错误的期望,认为DOF也是按照这个顺序出现在最终数据通道中。一旦传感器相对于局部系统旋转方向(如上图所示),那结果就不是这样的顺序了。
02、整体坐标系(图1中的黑色箭头)
这是我们软件中目前唯一真实的坐标系。所有测量点和模型点的坐标都以此为参考。因此,这个系统是所有坐标位置的参考点,但不是方向或DOF的参考点。
03、局部坐标系(图1中的橙色箭头)
已安装传感器的测量方向和自由度(DOF)的方向描述X、Y、Z都是由局部坐标系定义的。每个测量点都有一个单独的局部坐标系,独立于其他所有测点和整体坐标系。通过调整局部坐标系,让一个方向的法线指向垂直表面,传感器可以直接竖直安置,不需要调整方向斜着安装。
传感器与测量系统DOF的轴线正交排列,但可以根据空间情况旋转,比如电缆接口被挡住了,无法直接粘贴,因此本例中传感器的Z方向在测量系统的X方向进行测量。如下图所示。
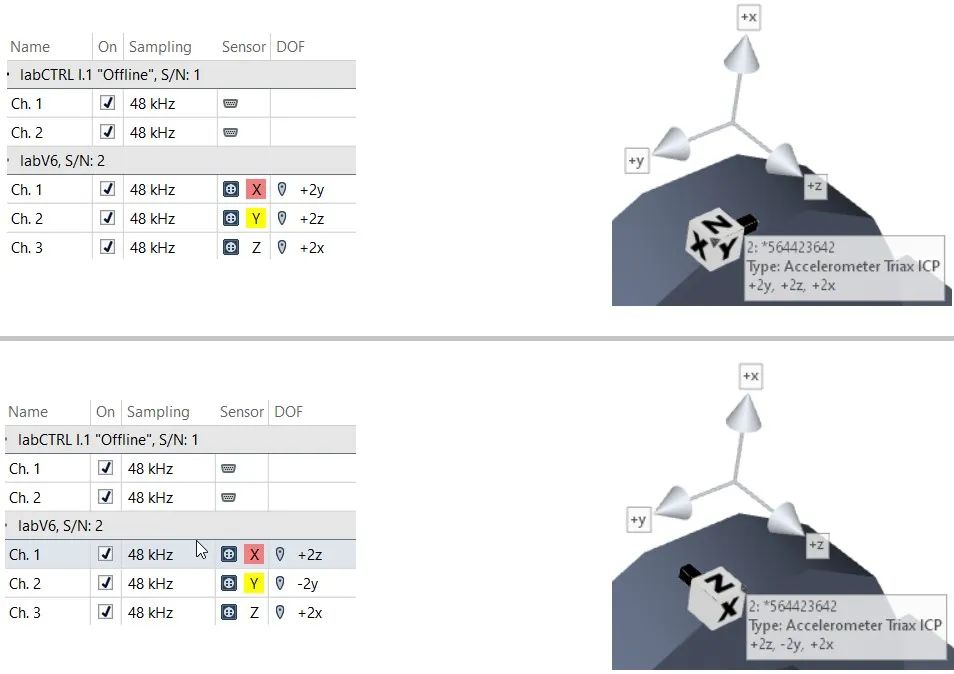
两个不同方向的传感器:通道列表中的DOF对应测量系统的方向。传感器的旋转导致了通道列表中DOF的变化。传感器的方向X、Y和Z只显示通道的分配。
每个通道对应局部坐标系的方向被存储在记录数据中。结合DOF和测量点数据库,可以明确知道每个测量的方向,而不会出现未知或不确定的情况。测量方向信息是完整和清晰的。
旧的数据或没有测量点数据库记录的数据不包含方向信息。在这种情况下,软件默认局部坐标系和整体坐标系一致。如果不一致,可以通过通道编辑器将方向信息从测量点数据库加载到HDF数据文件中。
04、DOF加载
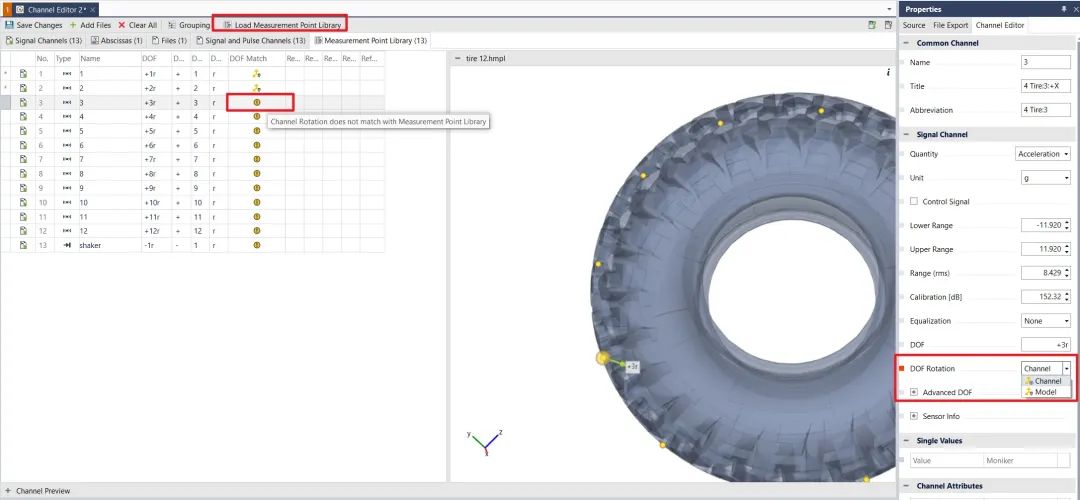
启动Channel Editor打开数据,并调用对应的测量点数据库。如果显示“Channel Rotation does not match with Measurement Point Library”则说明数据通道保存的DOF和测量点数据库不一致。可以把DOF Rotation改为Model,让通道数据关联用模型的自由度方向。







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
