




 广告
广告





















































完全自动驾驶距离我们有多远?

随之智能网联技术的不断发展,面向自动驾驶实用化的开发在全世界范围正在加速进行。自动驾驶相关的法律法规也逐步开始同步起草、发布、推行。无论从技术层面还是从法律法规层面,预计未来几年自动驾驶技术将在世界各国给人们提供优质的服务。
截至目前已经得到应用的自动驾驶技术,其大部分相当于等级L4。这个等级状态其实属于高度驾驶自动化水平,而还不是完全自动驾驶状态。那么,完全自动驾驶是什么样的呢,距离我们生活还有多远。
在这篇文章中,对完全自动驾驶的状态定义及其相关情况进行介绍。
作者:北斗(10年智能座舱及导航娱乐系统开发管理经验、3年自动驾驶产品化经验、5年自动驾驶模拟仿真测试环境构建经验)
出品:汽车测试网
■自动驾驶等级定义概要
L3以上属于自动驾驶
根据美国汽车技术会(SAE)制定的标准,自动驾驶等级分为L0~L5。L0为无自动驾驶,有部分应急辅助,L1为驾驶员辅助,L2为半自动驾驶,L3是有条件的自动驾驶,L4是高度自动驾驶,L5则为全自动驾驶。
等级L1~L2不是自动驾驶,而是定位于高级辅助驾驶系统(ADAS),等级L3相当于自动驾驶的最低等级。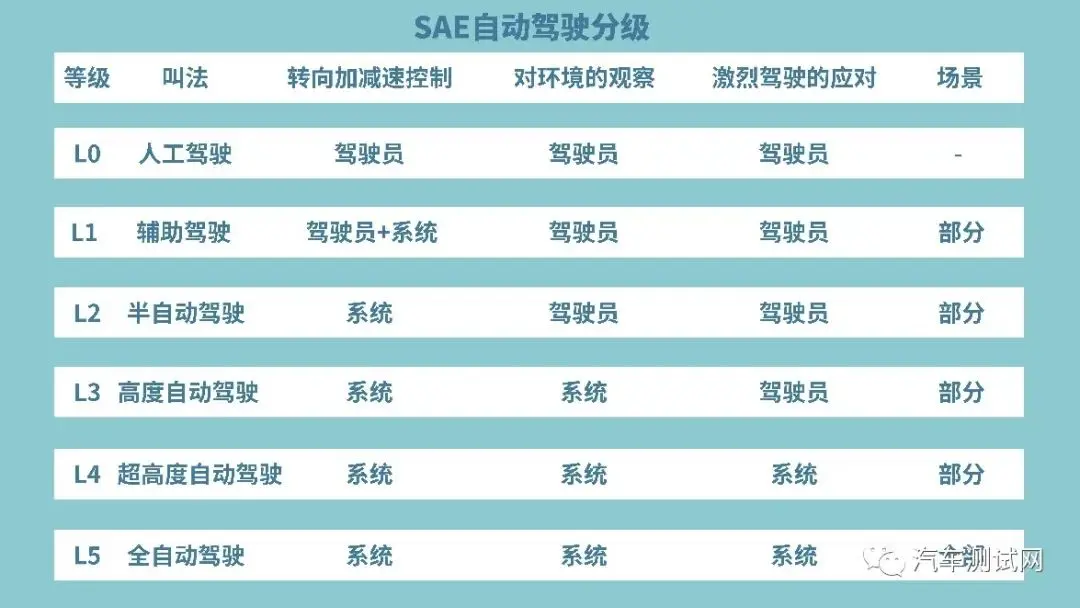 图1 SAE自动驾驶分级示意图
图1 SAE自动驾驶分级示意图
等级L3是在一定的运行设计域(ODD)中,自动驾驶系统承担全部驾驶控制。但即使在ODD内,如果系统提出驾驶交接请求(Take Over Request),则驾驶员也必须手动交接驾驶操作。也可以说是最初期阶段的自动驾驶技术。
因此,等级L3的高度自动驾驶的智能网联汽车仍然需配备驾驶员,也就是说驾驶员可以将手脱离方向盘,不必再有时长限制,只需在必要时接管车辆即可,但前提是必须得有驾驶员。当然也有远程操作型的等级L3自动驾驶方案,存在车内在无人的状态下行驶的情况,但在这种情况下,位于远程地的操作员或者安全员就被视为了驾驶员。
另外,ODD是基于行驶区域、道路类别、道路基础设施、行驶速度、天气环境等各种条件,由开发经营者针对每个自动驾驶系统设定的。例如,“在晴朗的天气下,自动驾驶汽车专用道路上,可以以时速60公里/小时以下的速度行驶的情况”。
L4 自动驾驶实现无人化
当自动驾驶进化到等级L4时,在一定的ODD内,原则上自动驾驶系统承担全部的驾驶控制。由于驾驶员不再需要介入,所以仅限于ODD内的行驶,可以实现无人驾驶的车辆行驶状态。在发生预想之外场景时,虽然也会存在手动介入的情况,但基本上自动驾驶系统在基于环境感知,可以自主行驶到安全的地方,并可以完成车辆起步、停止等驾驶操作。
目前正试行中的自动驾驶公共出行服务以及物流配送服务,大多以等级L4为目标,致力于稳固和提升像巴士路线一样的规定路线,或者像出租车一样的特定区域内的无人行驶的技术。等级L4自动驾驶的主要应用场景,是无人通勤用车辆和无人出租车的运营车辆,而并非是通常大家可以购买到的私家车。
 图2 自动驾驶出租车
图2 自动驾驶出租车
L5没有任何限制的完全自动驾驶
那么,等级L4进化到等级L5的话又会怎么样呢。完全自动驾驶的等级L5,应该实现不受ODD限制的条件下,在任何状况下都能够依靠自动驾驶系统完成完全自主行驶。也就是说,自动驾驶系统应持续且无限制地自主执行所有的动态驾驶车辆的任务,包括驾驶困难度高的场景。即便持续处在驾驶困难度高的场景时,也不期待车辆乘车人员响应介入。所谓“持续且无限制”,意味着不受ODD的影响,要求即使在驾驶动作持续陷入困难时,也不依赖乘车人员手动介入而进行脱困。
 图3 自动驾驶将实现解放驾驶员双手
图3 自动驾驶将实现解放驾驶员双手
无论是高速路,还是在一般城市道路,只要是手动驾驶车可以行驶的道路,即使行人走在道路旁边,等级L5自动驾驶车辆也应能很好地应对。在一些恶劣的天气情况下,自动驾驶车辆可以使用感知传感器,在满足各道路的限速的前提下,完成安全行驶。如果车辆燃料或者电池电量需要补给的情况下,自动进行路线规划,驶往附近加油站或充电站。
等级L5自动驾驶需要实现手动驾驶能够实现的所有驾驶场景。由于暴雨、暴雪、地震、周围发生交通事故等情况的影响,发生自主行驶困难的情况下,系统可以控制车辆暂时退避到安全的地方,等待自主行驶条件恢复具备后,再次进行自主行驶。
另外,在信号机发生故障、警察指挥行驶的特殊情况下,也能够正确地识别并遵从指挥命令行驶。所以系统需要具备极致灵活应对各种场合的“完全自动驾驶”能力。其实这是自动驾驶开发的真正目的,也可以说是完全自动驾驶应该达到的终极目标。
■实现完全自动驾驶面临的问题
传感器和AI技术需要进一步提高
为了实现完全自动驾驶,首先感知用的传感器性能和AI(人工智能)技术、计算机科学的进一步提升是必不可少的。在自动驾驶系统中,LiDAR、摄像头、毫米波雷达等各种传感器发挥着各自的优点,同时通过传感器融合也弥补了各自的缺点,共同发挥了系统“眼睛”的作用。
在完全自动驾驶中,各种传感器应尽量减小车辆行驶速度和外部天气环境等对车辆行驶的影响,以更高精度感知出各种类型目标的状态。同时,AI和计算机需要分辨出在什么位置出现了什么类型的目标,预测目标下一步会做出怎样的动作,并瞬间做出决策判断。
另外,还有一些更复杂、更有意思的场景,需要自动驾驶进行判断决策。例如在交通信号灯正常工作的十字路口,有位穿着像交通警察的人正在使用手势指挥交通,发出引导车辆指示的情况下,要求自动驾驶车辆做出正确的判断。这种情况一般来说,交警的手势指挥命令优先,但这种场景下,还要求自动驾驶系统要先判断这位“穿着像交通警察的人”是否真的是交通警察。这种相对混乱的情况下,即便是人类司机也必须灵活迅速地做出相应的决断。
 图4 自动驾驶需优先服从交警指挥
图4 自动驾驶需优先服从交警指挥
所以,只有无限的追求并优化系统感知能力、决断能力、执行能力,实现与人类同等,甚至高于人类的能力,才能实现完全自动驾驶。
完善基础设施建设 提高系统安全性
为了避免安全问题发生,还需要不断优化扩大感知传感器和AI能够覆盖到的范围。例如,十字路口中的盲区,影响传感器性能的极端恶劣天气等。针对楼宇间狭窄道路的盲区,可以通过设置在道路侧十字路口附近的感知传感器进行数据采集,并通过数据传输的方式共享盲区内状态信息,以应对未预料到的情况。
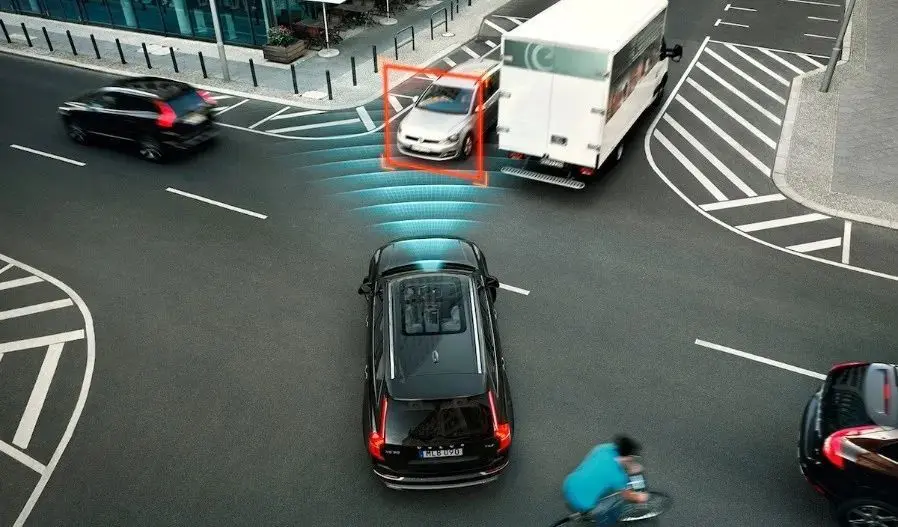 图5 自动驾驶需更多基础设施支撑
图5 自动驾驶需更多基础设施支撑
路侧感知硬件产品包括摄像头、毫米波雷达、雷视一体机、激光雷达等。摄像头应用最多,市场和技术发展最为成熟。毫米波雷达在应用价值得到验证之后也逐渐成为信控系统的标配,在车路协同、智慧高速中的应用越来越多。
诸如此类路侧感知技术的实现,可以完成道路基础设施信息和车端信息的整合,促使路侧设备与车端设备相互协作。不仅仅停留在5G通信,传输速率更高,延迟更低,通信性能更稳定的通信技术也逐步成为了完全自动驾驶的必备基础。
3D高精度地图需实现全范围覆盖
作为信息基础设施被重视的是3D高精度地图和动态地图。现在3D高精度地图正在进等级L3和等级L4的大量实际应用,主要是以3D高精度地图为基础,进行本车位置的推定和规划。
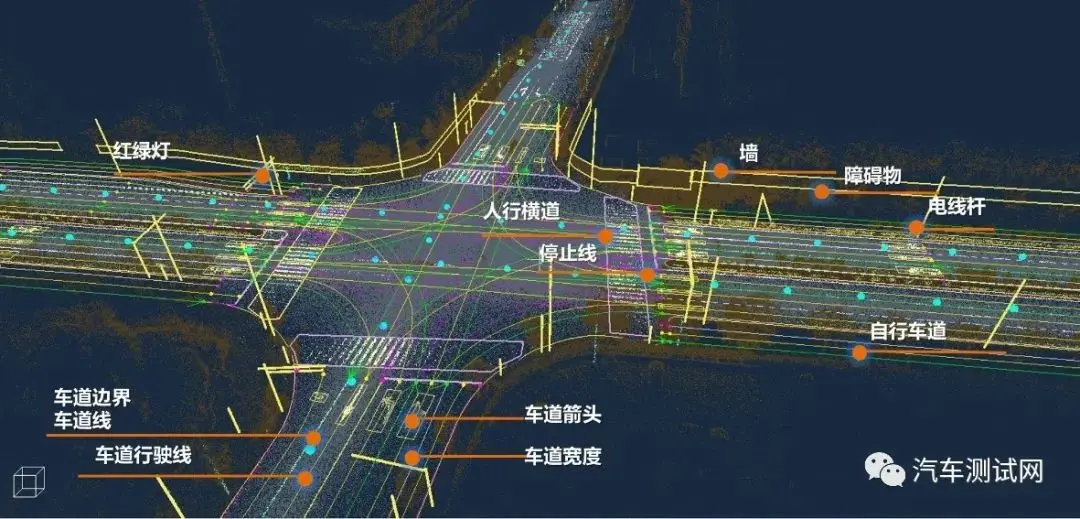 图6 自动驾驶需优先服从交警指挥
图6 自动驾驶需优先服从交警指挥
虽然也有推进优先AI、不依赖3D高精度地图的自动驾驶系统开发的动向,但在补充数据信息、降低AI计算负担的角度上,3D高精度地图对此无疑是非常有帮助的。而高精度地图的主要问题是地图数据的整备和更新。为了能够实现完全自动驾驶的实际应用, 3D高精度地图必须覆盖所有的道路。并且为了确保地图数据的鲜度,还必须进行定期的数据更新。地图数据相关的工作量无疑是巨大的。
安全的高度化和法律法规
深圳市人大常委会网站发布《深圳经济特区智能网联汽车管理条例》(以下简称《条例》)经深圳市第七届人民代表大会常务委员会第十次会议于2022年6月23日通过,自2022年8月1日起施行。这是国内首部关于智能网联汽车管理的法规,当前热门的无人驾驶、自动驾驶、高级辅助驾驶等技术上路行驶将真正实现有法可依,对于后续相关技术的商业化落地,以及其他城市甚至国家层面制定相关政策法规都将起到积极的借鉴意义。
随之技术的迅猛发展,法律法规应该紧随技术的发展而更新,不应该成为技术发展的绊脚石。对于自动驾驶这一快速发展的新兴事物,确实存在着大量的隐患和未知,但也正因如此才更应积极的推动立法,让技术发展有法可依,形成更加良性的循环。
■实现完全自动驾驶的时间
今年7月,特斯拉首席执行官(CEO)埃隆·马斯克(Elon Musk)以视频的方式在“2023世界人工智能大会”上宣布,特斯拉的自动技术已经非常接近完全自动驾驶的目标,并可能在今年晚些时候具备L4或L5级的完全自动驾驶能力。同时,马斯克也强调,特斯拉非常乐意将自动驾驶技术授权给其他汽车制造商。
除了特斯拉以外,对于完全自动驾驶的实现时期,以2030年作为目标的开发商和各国政府也有很多,但截至目前尚无其他明确的统计根据。
■【总结】实现L5级完全自动驾驶技术突破是必不可少的
从上述内部不难看出,虽然理论上等级L5自动驾驶是等级L4自动驾驶的进一步功能性能层面的升级,但为了实现全面自动驾驶,全面的创新和技术突破是不可或缺的。与深度学习使AI开发变得炙手可热一样,某一领域的技术突破可能会突然到来。随着AI技术的爆炸性进化,超越人类智能的“技术特异点”预计将在2045年到来,AI今后也将持续优化。相信L5级完全自动驾驶终将有一天会实现,期待自动驾驶技术进一步加速开发。
- 下一篇:新能源商用车充电系统开发现状
- 上一篇:AI时代下自动驾驶技术的进化



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
