




 广告
广告





















































干货|自动驾驶系统中感知传感器实物仿真测试环境构建

随着智能驾驶技术的普遍应用,智能驾驶相关的测试测量方法也随之发展。特别是模拟仿真测试领域,在智能驾驶产品开发过程中的应用越来越广泛。而无论是自动驾驶(AD)还是高级辅助驾驶系统(ADAS),都是依靠高精度摄像头、毫米波雷达、激光雷达等感知传感器对车辆周边环境进行感知识别来实现的。那么在自动驾驶系统模拟仿真测试实施过程中,系统中感知传感器是如何进行实物仿真测试验证的呢。
本文对自动驾驶系统中感知传感器实物仿真测试环境构建的原理及其相关方案进行介绍。
作者:北斗(10年智能座舱及导航娱乐系统开发管理经验、3年自动驾驶产品化经验、5年自动驾驶模拟仿真测试环境构建经验)出品:汽车测试网
■ 视觉摄像头的实物仿真环境构建
视觉摄像头是感光传感器,光线通过摄像头光学模组,映射到光学模组后面的感光芯片上,芯片将光信号转换成电信号,这些电信号经过滤波、编码等信号处理步骤,最终形成摄像头模组的数字视频信号。视频数据通过数字视频接口,传输给摄像头主控制板。摄像头主控板集成了主处理器、图像处理单元和摄像头电源模块等电路单元,其中主处理器基于人工智能(AI)和图像处理技术,图像处理单元对拍摄图像进行实时的解析。数据经过处理后,车辆前方的车辆、行人以及障碍物被识别出来。
放置在驾驶室内部的自动驾驶系统视觉前向摄像头,朝着车辆行驶方向。前向摄像头透过风挡玻璃对车辆前方的环境进行拍摄,前向视觉摄像头可以识别取景范围内的车辆、行人、车道线、交通信号灯、交通道路标志等目标。
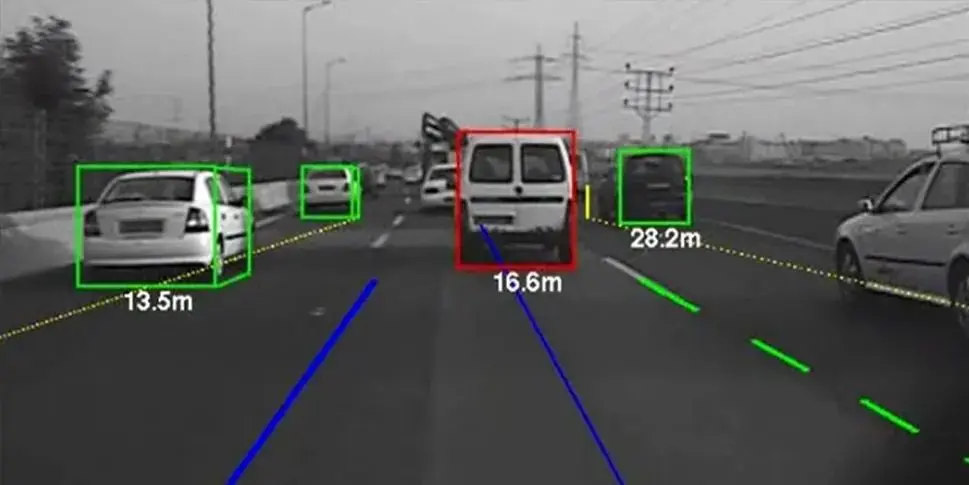 图1 视觉摄像头识别车辆前方场景图(图片来源:车元素)
图1 视觉摄像头识别车辆前方场景图(图片来源:车元素)
基于上述摄像头图像采集和目标处理的原理,针对视觉摄像头的场景目标模拟仿真可以采用视觉场景再现的方式进行实现。最简单便利的方式是利用投影的方式,对提前录制好的视觉场景视频进行播放,视觉摄像头可以非常轻易的采集到模拟场景中目标,从而完成对摄像头目标的模拟。
用于摄像头目标模拟的投影系统,一般由投影仪、幕布及支架组成。因为测试环境光照影响,投影仪建议采用亮度在5000流明以上、分辨率在1920*1080dpi以上的机型。如果测试系统针对的是广角镜头的摄像头,在空间场景内还可以使用弧形投影进行更大可视角度的画面模拟。由于画面可视角度可能超出单台投影仪的投射角度范围,这时候系统中还需要增加视觉融合设备,用于多台投影仪的投射画面拼接。
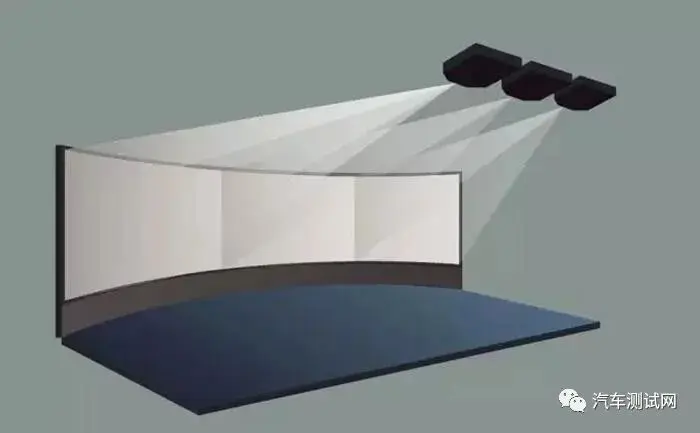
图2 投影方式模拟视觉目标的场景图(图片来源:数字展示在线)
除了投影方式进行视觉目标模拟之外,还可以使用摄像头黑箱的方式进行视觉目标的模拟。这里使用的摄像头黑箱其实就是为摄像头构建的小型光学暗室。暗室内部包含摄像头固定用支架、显示器、直线滑轨以及调焦透镜等组件。暗箱使用时,显示器播放准备好的视觉场景视频画面。将被测视觉摄像头固定在支架上,支架结构确保摄像头光学模组的光心水平,通过调整焦距透镜的位置,将摄像头采集画面的清晰度调整至最佳效果,视觉摄像头即可对播放视频中的目标进行识别,进而实现目标模拟仿真。
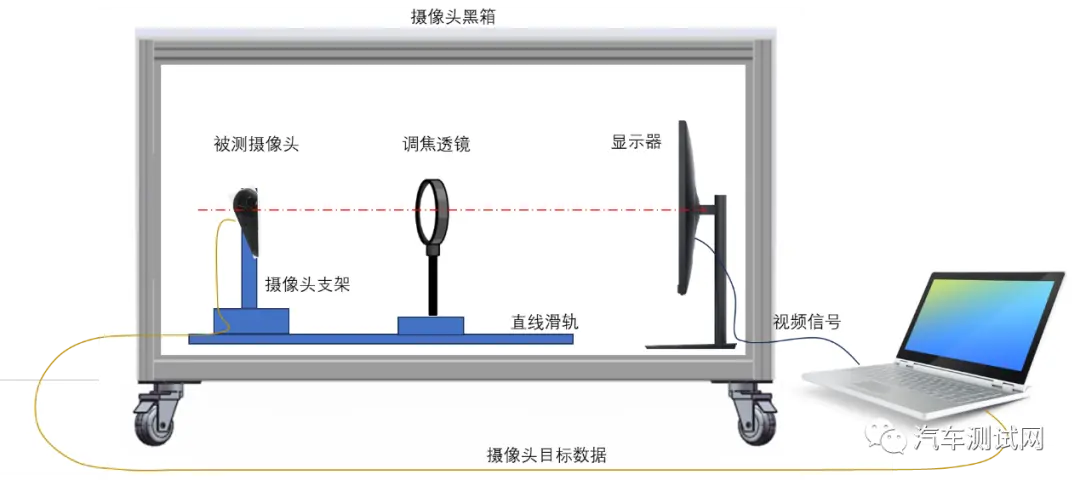
图3 视觉摄像头黑箱结构示意图
目前自动驾驶系统中应用的摄像头有两种类型,单目摄像头和双目摄像头,后者因为提供了复数的摄像头视点,虚拟目标需能够模拟出视角偏差效果,所以目前上述两者方案暂不能支持双目摄像头的目标模拟。
■ 核心传感器①:毫米波雷达的功能・构造・应用
自动驾驶技术中另一个广泛使用的传感器就是毫米波雷达。所谓毫米波是指微波的波长,毫米波雷达发出毫米波对外部环境进行探测,利用毫米波回波进行被测物的距离、方位等特性的分析检测。目前应用比较广泛的毫米波雷达,使用频率是77GHz、24GHz。
毫米波雷达测距原理比较也比较简单,就是通过RF电路发射天线把毫米波微波发出去,然后接收天线接收毫米波回波,根据发射波和回波之间的时间差,对物理距离和位置进行测算。毫米波雷达测速是基于多普勒效应(Doppler Effect)原理,当声音,光和无线电波等振动源与观测者以相对速度相对运动时,观测者所收到的振动频率与振动源所发出的频率有所不同。当发射的电磁波和被探测目标有相对移动、回波的频率会和发射波的频率不同。当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线而去时,反射信号频率将低于发射机频率。由多普勒效应所形成的频率变化叫做多普勒频移,它与相对速度成正比,与振动频率成反比。
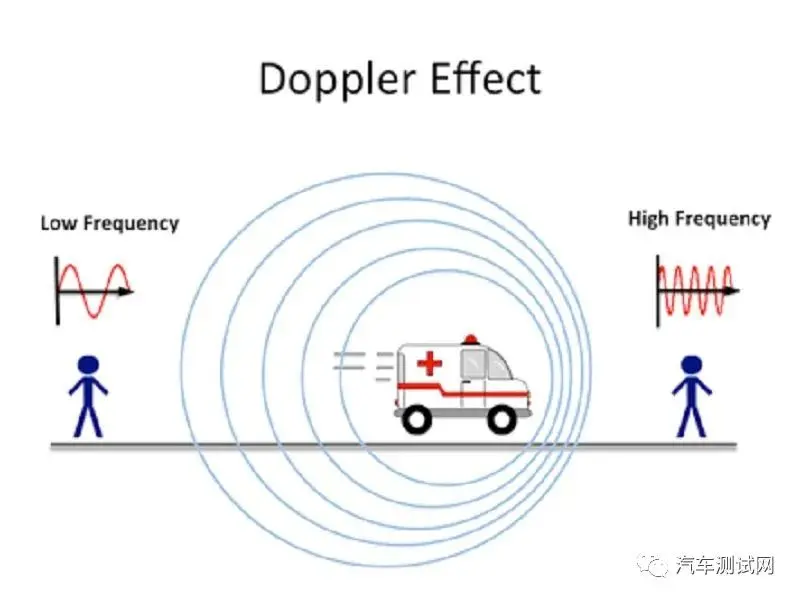 图3 多普勒效应示意图(图片来源:https://www.guyhowto.com/)
图3 多普勒效应示意图(图片来源:https://www.guyhowto.com/)
基于毫米波雷达的上述原理,在毫米波雷达目标模拟环境构建时,采用毫米波雷达目标模拟器进行毫米波雷达目标的模拟。模拟器可以通过空馈的方式接收被测毫米波雷达的发生信号,运用信号处理技术,分析发射信号的特征参数,并根据模拟需求,发射出叠加目标数据的雷达回波。毫米波雷达接收到回波后,进行目标数据参数解析,从而实现毫米波雷达目标的模拟仿真。
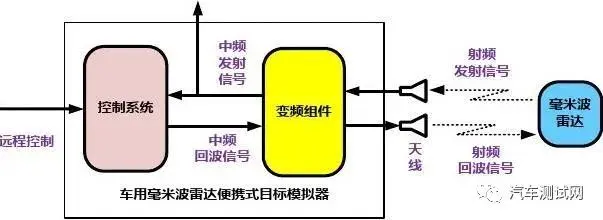
图4 毫米波雷达目标模拟器原理示意图
毫米波属于无线电微波,所以在模拟仿真环境构建时,会把目标模拟设备、被测设备放置在相对密闭的微波暗箱环境中。毫米波雷达目标模拟过程中,会需要模拟各不同角度上的目标,由于目标模拟器不方便进行移动,无法模拟出相对测试环境的绝对角度,所以一般还会采用旋转云台搭载被测毫米波雷达,进行雷达与目标模拟器之间相对角度的模拟。
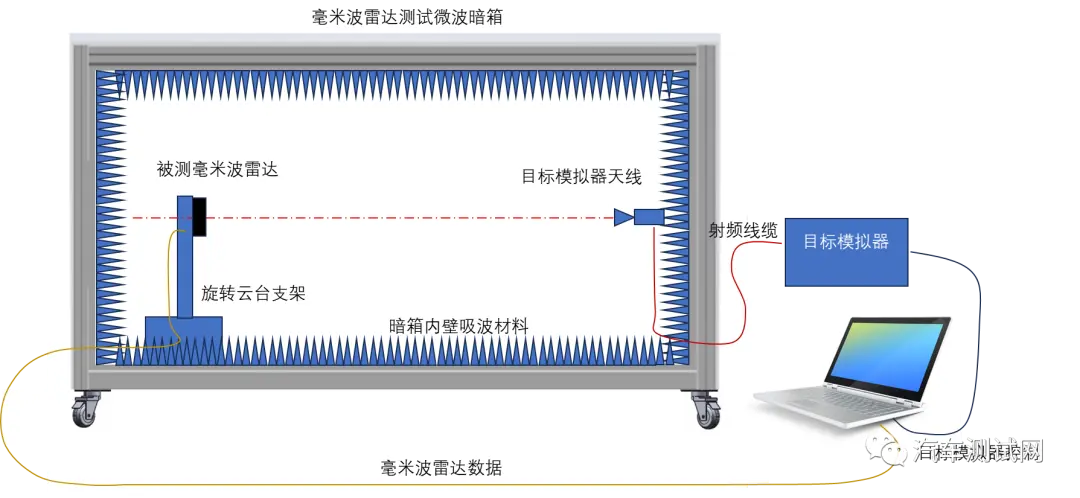
图5 毫米波雷达目标模拟微波暗箱结构示意图
■ 总结:感知传感器模拟仿真方案多样性、实用性强
从上面的介绍不难看出,自动驾驶主要感知传感器的实物仿真环境构建,都是基于工作原理,灵活运用传感器感知介质特性,在标准环境下,进行的模拟目标匹配的信号再造。针对与同一类型的感知传感器,其实物仿真环境的构建方式其实并非是唯一的,只要环境中相对洁净,未引入其他影响感知传感器识别目标的噪声,并能准确有效的对该类型传感器可感知目标进行模拟,那这就是一个成功的环境构建方案。所以在不同模拟仿真测试系统应用时,可以结合不同的测试需求,对传感器实物仿真构建方法进行选择。
从自动驾驶模拟仿真测试产业发展需求角度出发,目前可以实现的感知传感器环境构建方案还相对较少,后续自动驾驶整车级模拟仿真测试环境中,必定需要多类型感知传感器融合仿真测试环境。这对感知传感器实物仿真测试环境构建提出了更高的要求,也期待有更多更优先的构建方法和创新型构想被提出。
- 下一篇:一文了解汽车阳光模拟老化技术
- 上一篇:新能源汽车混合动力系统综述



编辑推荐




最新资讯
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
-
迄今为止最先进的版本:imc发布全新imc STU
2025-04-23 17:06
-
艾德克斯上海慕尼黑电子展圆满收官,展示测
2025-04-23 17:03
-
本田下一代燃料电池首次亮相北美
2025-04-23 16:49
