




 广告
广告





















































法规解读|UN ECE R157框架介绍和试验要求

上海机动车检测认证技术研究中心有限公司(以下简称“上海汽检”)现已具备UN ECE R157 自动驾驶全栈的测试能力,并获得了国内外认可。实验室测试设备、测试环境、质量体系、人员能力等关键要素符合UN ECE R157法规认证的要求,可为中国车企智能驾驶出海认证提供测试支撑。
现据UN ECE R157法规总体框架,重点介绍法规涉及的封闭场地测试、公共道路测试和仿真测试内容。
UN ECE R157法规总体框架:
2020年6月25日,联合国欧洲经济委员会世界车辆法规协调论坛通过了有关自动车道保持系统(Automated Lane Keeping System,以下简称“ALKS”)的车辆认证统一规定,这是首个针对SAE L3级别自动驾驶功能决议的具有约束力的国际法规。ALKS控制车辆长时间的横向和纵向移动,无需驾驶员进一步的命令。激活ALKS时,其应代替驾驶员执行驾驶任务,即管理包括故障在内的所有情况,并且不得危及车辆乘员或任何其他道路使用者的安全,驾驶员应随时能接管ALKS系统。
2022年6月22日WP29对该法规进行了修订,修订后的法规增加了LCP变道并扩展了高速范围,不再仅适用于高速公路低速或堵车场景,将适用范围由M1类车辆扩展到了M和N类车辆,将特定交通环境中的L3自动驾驶系统车速限制从60km/h扩展到了130km/h。
作为首个针对道路车辆自动驾驶系统的监管要求,UN ECE R157法规对系统安全和故障安全响应、人机交互界面信息、目标事件检测与响应(OEDR)、自动驾驶储存系统(DSSAD)以及网络安全和软件更新等方面作出规定。
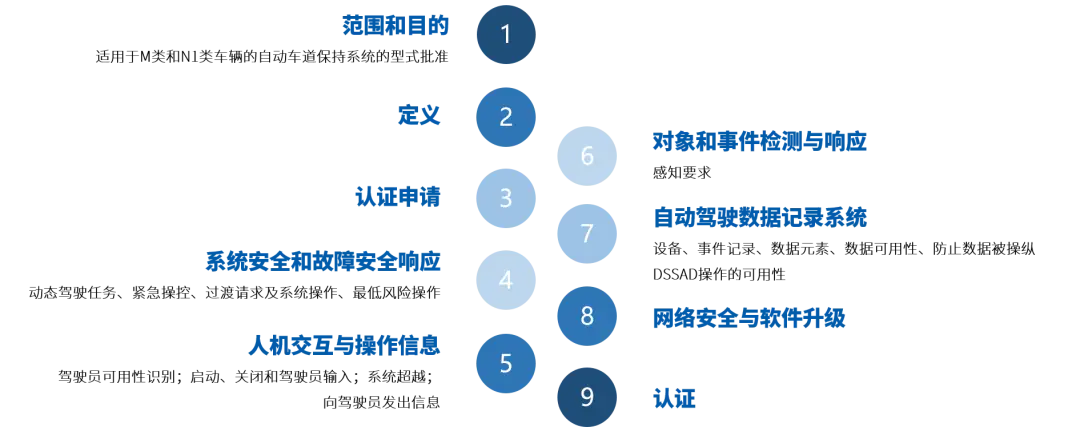
UN ECE R157法规附件及相关附录中还提供了旨在解决与系统安全评估相关的复杂性的条款及适用于车辆批准的标志管理、评估、测试和报告等技术要求,主要包括附件3: ALKS的交通干扰临界场景指南,附件4: 功能和操作安全方面的特殊要求,附件5: 封闭场地测试,附件6: 公共道路测试。
封闭场地测试、公共道路测试和仿真测试介绍:
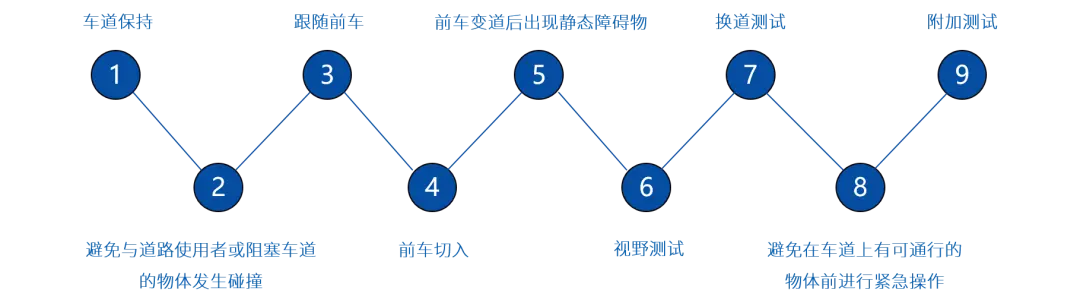
UN ECE R157法规中场地测试包含车道保持、避免与道路使用者或阻塞车道的物体发生碰撞、跟随前车、前车切入前车变道后出现静态障碍物、视野测试、换道测试、避免在车道上有可通行的物体前进行紧急操作、附加测试类别测试场景。测试场景参数选择应能够保证特定“困难度”,并包含困难场景和不可避免碰撞场景的参数范围。型式认可机构应使用法规附件1中提供的指导方法来确定测试的参数范围。
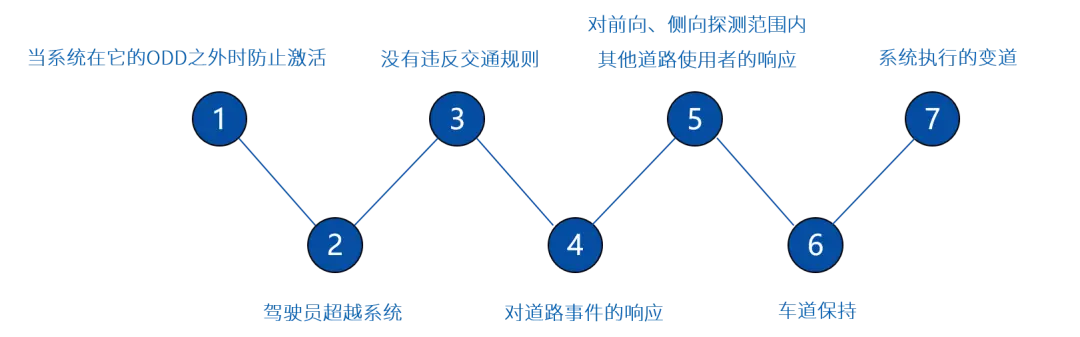
UN ECE R157法规应在畅通、轻度拥堵和重度拥堵的交通条件下进行公共道路测试验证,测试位置路线、时间和环境条件应由型式批准机构选择确定。选择应包括 ALKS 预计会遇到具有挑战性的情况(例如,狭窄的弯道、可变的基础设施或交通条件引起的速度变化、道路合并等情况)以及在 ALKS 运行期间接近其声明的 ODD 边界(能见度或道路的变化条件,ODD计划或突然结束),公共道路测试应包括:系统在ODD外时防止激活、驾驶员超越系统、交通规则测试、对交通事件的响应、对前向、侧向探测范围内其他道路使用者的响应、车道保持系统执行的变道等测试场景,以评估公共道路测试期间ALKS系统的DDT的行为。
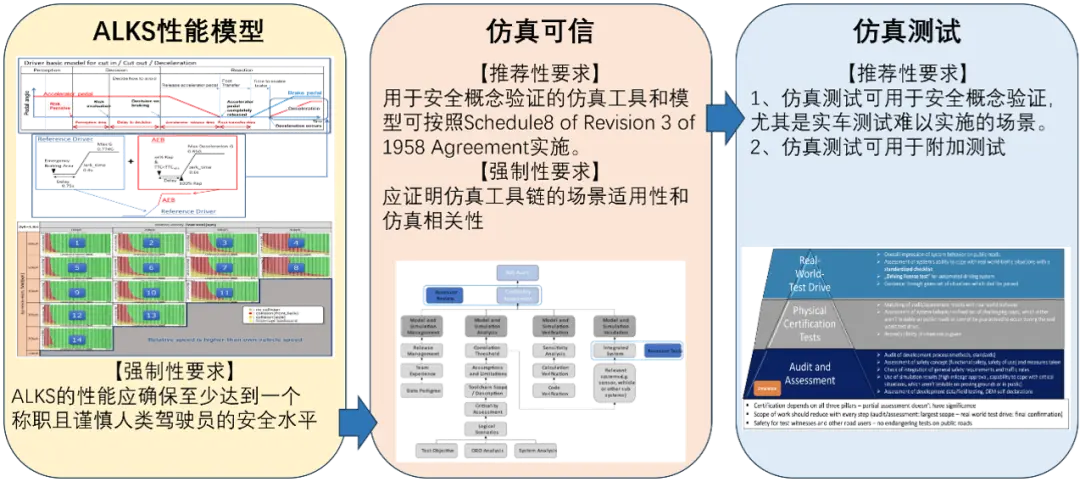
UN ECE R157法规中仿真的强制性任务是落实ALKS性能模型,基于给定的称职且谨慎人类驾驶员模型划定系统在不同场景中的安全性能需求,同时可以实现场景的风险等级划分,用于支撑建模与仿真分析。推荐性任务是仿真测试,其主要用途是在安全概念验证中承担实车难以实施的场景,亦可承担附加测试相关内容。当实施仿真测试时,建模与仿真确认及其相关的分析内容需要提供佐证材料,工具链可参照1958 Agreement实施,实际操作过程中亦可通过第三方工具链认证实现。



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
