




 广告
广告





















































标准解读 GB/T 41630-2022智能泊车辅助系统

一、背景与目的
随着智能泊车技术的日渐成熟,目前智能泊车辅助系统装备率已经很高,并且会越来越普及。智能泊车辅助系统的出现,提高了泊车便利性,解决了停车难的问题,并且有效降低了停车时事故的发生。智能泊车辅助系统是未来全自动驾驶系统的重要组成部分。
智能泊车辅助系统 intelligent parking assist system(IPAS): 是指在车辆泊车时,自动检测泊车空间(停车位)并为驾驶员提供泊车指示和/或方向控制等辅助功能的系统。
二、技术要求
2.1停车位搜索
要使汽车能实现自动泊车,如何精确找到空间合适的停车位是第一步的。IPAS系统应该能搜索出以下两种停车位的一种:
1类IPAS停车位:
由边界车辆围成的停车位,即一个停车位空间,他不是一个标准划线的停车位。此类停车位又分为平行停车位和垂直停车位两种,在以下泊车系统停车位置要求和试验中,停车位置空间均按下述方式布置。
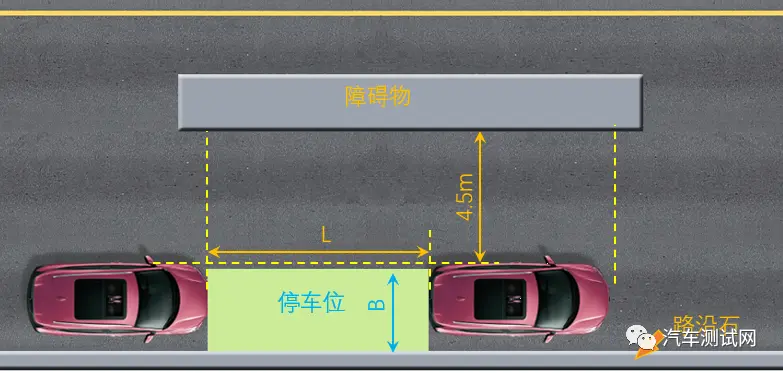
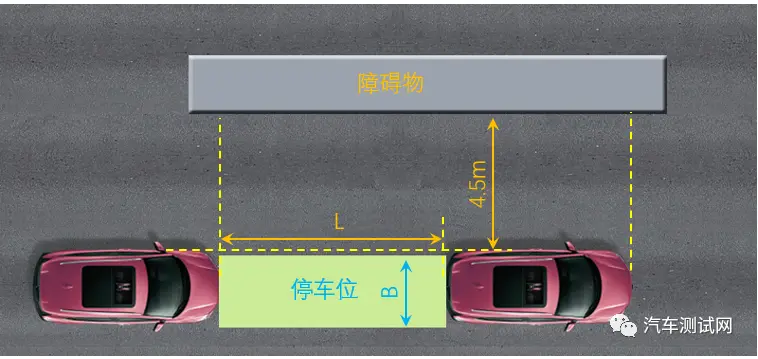
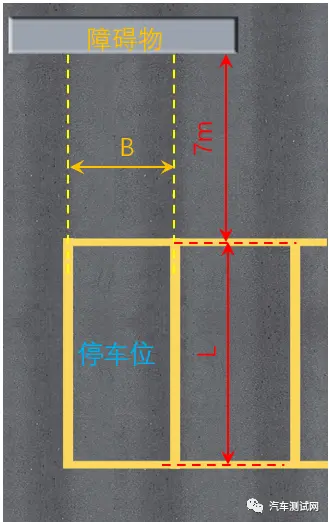
对于平行停车位,由两辆边界车辆组成且与试验车辆宽度差值在0.15m以内,在停车位路侧端距离边界侧边缘线4.5m处设置高度不小于1.5m的泊车障碍物,障碍物至少覆盖前方边界车辆前端至后方边界车辆最前端区域。对于车长不大于4m的试验车辆,停车位长度L为试验车辆长度加1m,对于车长大于4m的试验车辆,停车位长度L为1.25倍试验车辆长度。停车位宽度B为试验车宽加0.2m。
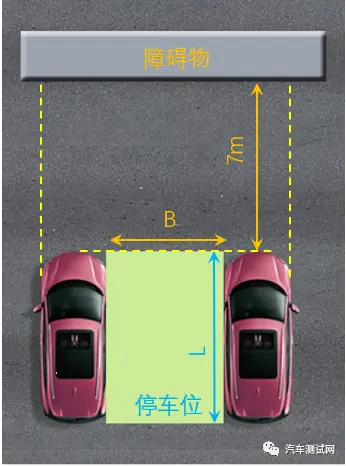
对于垂直停车位,由两辆边界车辆组成且与试验车辆长度差值在0.3m以内,边界车辆与试验车辆平行摆放且前端对齐。距离边界车辆最前端7m处设置高度不小于1.5m的泊车障碍物,障碍物至少覆盖边界车辆及停车位区域。停车位长度L为试验车辆,停车位宽度B为试验车宽加1.2m。
2类IPAS停车位:
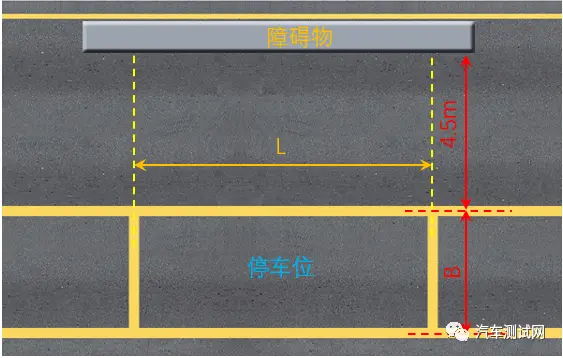
由停车位边线围成的停车位,即一个标准停车位。对于水平停车位,停车位宽度B为2.5m,长度L为6m或试验车辆长度加1m(取最大值)。对于垂直停车位,停车位宽度B为2.5m或试验车辆宽度加0.6m(取最大值),长度L为6m。两种停车位的障碍物设置参考1类IPAS停车位。
在IPAS搜索到停车位时向驾驶员提示停车位信息,如搜索到多个停车位时,需要由驾驶员主动确认停放位置。
2.2泊车辅助状态
车辆停稳后驾驶员选择停车位,系统进入泊车辅助状态接管横纵向控制权限。此时IPAS系统提供2种方法供驾驶员选择操作,如下:
一种是系统仅提供转向操纵控制横向(左右转向)运动,驾驶员踩踏加速踏板控制纵向(前进或后退)运动;目前已在汽车上使用的自动泊车系统大多为此,称为半自动辅助泊车系统,在泊车过程中由于驾驶员的介入导致车速与方向盘难以协调控制,泊车效果的稳定性和可控性较差。
另一种是横向运动和纵向运动均由系统完全控制,驾驶员不参与泊车操作,这种称为全自动泊车系统。整个自动泊车过程中系统应限制车辆最大运行速度不大于10km/h,如车辆超过10km/h,系统应向驾驶员发出提示音,并且退出泊车辅助状态。同时,驾驶员也可以随时主动退出泊车辅助状态,退出操作方式可包括但不限于操纵方向盘、制动踏板、档位、驻车制动等主动接管逻辑。
2.3 泊车结束位置
在整个自动泊车过程种,车辆始终不能与车位边界或周围物体发生碰撞,泊车完毕后车辆应停放到停车位内部适宜位置。停车位又分为垂直空间和水平空间车位,水平空间车位测试场景又分为有路沿石和无路沿石两种。
2.3.1 第1类IPAS停车位位置:
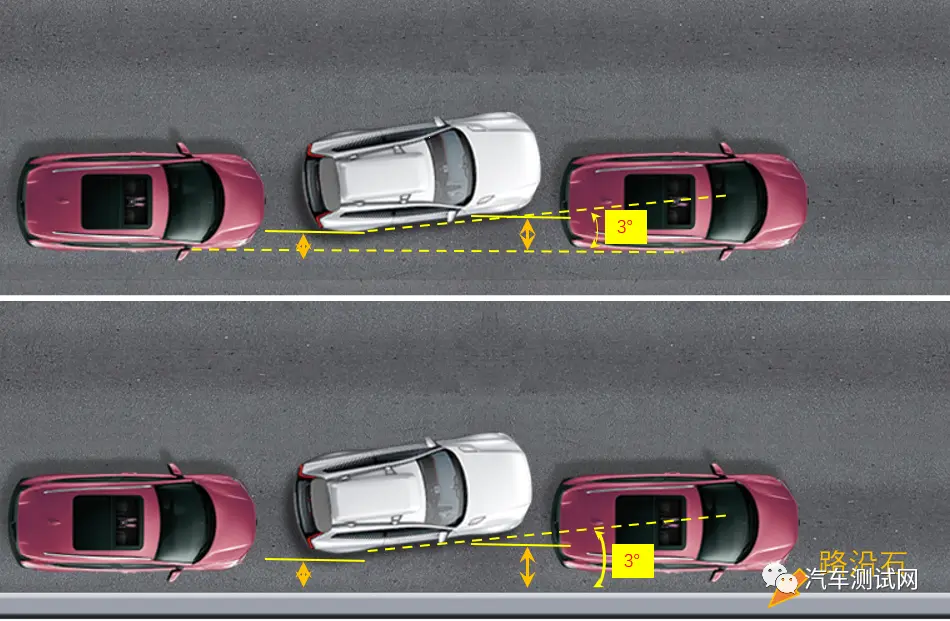
对于第1类IPAS平行停车位,当自动泊车结束时,无路沿石停车位以边界车辆侧边缘线与试验车辆侧边缘线的夹角应不大于 3°,试验车辆前、后轮胎外边缘接地点到边界车辆侧边缘线的最小距离不大于 0.15m。有路沿石停车位以路沿石与试验车辆侧边缘线的夹角不大于 3°,试验车辆前后轮胎外边缘接地点到路沿石的最小距离0.05 m~0.35m 之间。另外,停放的两辆边界车辆与试验车辆尺寸不要求完全一致。
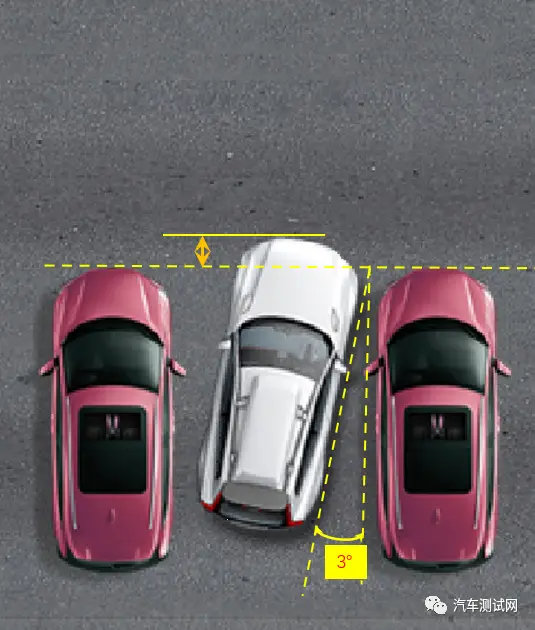
对于第1类IPAS垂直停车位,当自动泊车结束时,试验车辆两侧与边界车辆最小距离应大于0.3m,试验车辆最前端点与边界车辆最前端连线的距离绝对值应不大于0.4m ,试验车辆侧边缘线与边界车辆侧边缘线的夹角应不大于3°的范围内。
2.3.2 第2类IPAS停车位位置:
对于第2类IPAS平行停车位,当自动泊车结束时,试验车辆侧边缘线与停车位边界线的夹角应不大于3°。前车轮轮胎外边缘接地点和后车轮轮胎外边缘接地点到停车位边界线内边缘的最短距离应大于0。车身最后端和最前端与停车位边界线内边缘之间的最短距离应大于0。
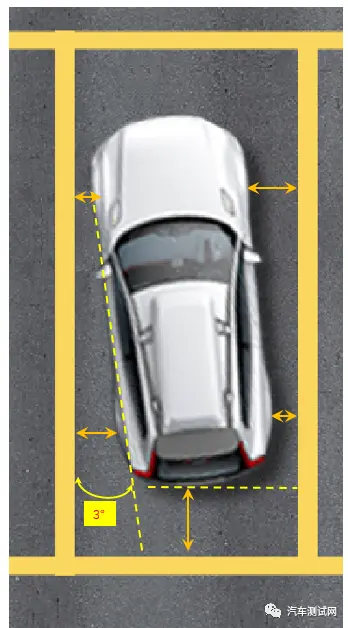
对于第2类IPAS垂直停车位,当自动泊车结束时,试验车辆侧边缘线与停车位边界线的夹角应不大于3°。各轮胎外边缘接地点距停车位边界线内边缘的最短距离应大于0。车身最后端垂直投影距停车位边界线内边缘的最短距离应大于0,即车身应处于停车线内部区域以内。
三、智能泊车辅助系统的运行原理
智能泊车辅助系统是利用安装在车身上的多种传感器,测量车辆自身与周边物体之间的距离、速度和角度,然后通过控制系统实时运算,控制车辆的转向和加减速,以实现自动泊车的功能。
3.1智能泊车辅助系统的基本组成是:
传感器系统:主要用来探测环境信息,寻找车位并实时反馈车辆位置信息;
中央控制系统:主要用来处理环境感知信息,并在线实时计算目标车位参数和车辆相对位置,判断可行性并确定自动泊车策略;
执行系统:主要根据中央控制系统的决策信息,控制方向盘、动力系统、制动系统,按照中央控制器决策路径控制车辆驶入到泊车位。
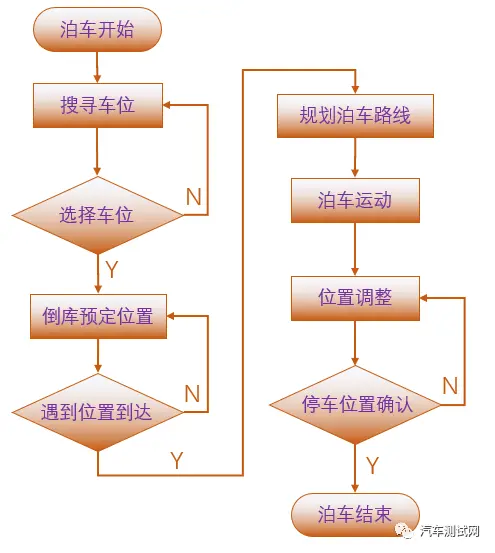
3.2智能泊车辅助系统工作过程主要步骤:
搜寻车位,推荐车位类型(1类或2类IPAS停车位,水平或垂直)
选择泊车位置,并提示驾驶员;
将车辆行驶至倒库预定位置。
智能泊车辅助系统规划泊车路线并提示驾驶员操作车辆(控制档位及制动),
中央控制系统根据传感器信息,实时进行环境建模,生成车辆运动路径,控制车辆无碰撞地自动运动到泊车位。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
