




 广告
广告





















































关于欧盟智能网联汽车型式批准框架进展研究

全球在加强智能网联汽车行业监管的立法和标准化方面,持续开展积极实践和稳步探索。在UNECE(联合国欧洲经济委员会)技术法规层面,已建立L3自动驾驶法规(UN R157自动车道保持系统),并基于L3法规框架,重点针对组合驾驶辅助(L2),起草新的驾驶员控制辅助系统(DCAS)法规,填补监管空白。在欧盟立法层面,为推动汽车驾驶自动化,欧盟采取渐进式监管方法,逐步建立针对智能网联汽车L3和L4的新的欧盟型式批准框架。
一、概况
欧盟制定和逐步实施《通用安全法规》(Reg.(EU)2019/2144),以及采纳一系列相关的技术或实施法规,引入一系列新的安全功能和驾驶辅助措施,以协助驾驶员并更好地保护乘客和弱势道路使用者,旨在解决车辆和道路安全需求。其间,欧盟发布自动化移动战略,为部署网联和自动化移动系统而采取的一整套行动,包括部署关键技术和基础设施、参加联合国技术法规研究、建立正确的欧盟内部市场监管框架。欧盟通常将联合国UNECE技术法规直接纳入其车辆安全立法,方法是在其车辆型式批准法规中插入对它们的引用。在欧盟立法层面,为推动汽车驾驶自动化,欧盟采取渐进式监管方法,基于一系列试点探索,积极与业界合作与协商,逐步建立针对智能网联汽车L3和L4的新的欧盟型式批准框架。UNECE、欧盟关于L3和L4自动驾驶法规规定了自动驾驶汽车获得车辆型式批准所需的技术安全要求和验证要求。此外,德国等欧盟成员国保留对管理其实际使用的许多条件的控制,包括运营批准、机动车登记等。欧盟计划通过相关立法,允许自动驾驶汽车在欧洲道路上行驶,将有助于增加公众信任,促进创新并提高欧洲汽车工业的竞争力。

表1 车辆驾驶自动化型式批准主要技术法规
二、欧盟建立智能网联汽车型式批准框架
智能网联汽车有可能为减少道路死亡人数做出巨大贡献,据估计,超过90%的道路事故是由某种程度的人为错误造成的。由于自动驾驶汽车将逐渐接管驾驶员的任务,因此在欧盟层面采用统一的规则和技术要求,同时尊重技术中立原则,并在UNECE/WP.29的框架内在国际层面推广。《通用安全法规》(Reg.(EU) 2019/2144)及其技术和实施法规,为欧盟的有条件自动驾驶和高度自动驾驶汽车(含全自动驾驶汽车)制定了法规框架,从技术成熟度、数据记录、网络安全措施等方面进行规范,以确保此类车辆在投放市场之前是安全的且技术足够成熟,从而为欧盟自动驾驶汽车铺平道路。新的型式批准框架中,L3自动驾驶汽车安全法规采用联合国技术法规,具体为UN R157自动车道保持系统,涵盖高速公路低速应用的自动车道保持系统的型式批准,修订后包括变道和高速。欧盟采用新的全自动驾驶技术立法(L4),即欧盟委员会实施法规(EU) 2022/1426《全自动驾驶车辆自动驾驶系统(ADS)型式批准的统一程序和技术规范》,这是同类中的第一个国际规则。特别关注取代高速公路驾驶员的自动驾驶汽车(L3)和全自动驾驶汽车(L4)。通过授权和实施法规制定的技术规则,将在全自动汽车投放欧盟市场之前对其安全性和成熟度进行全面评估,内容涵盖测试程序、网络安全要求、数据记录规则、汽车制造商对安全性能和事故的监测和报告要求等。

表2 欧盟智能网联汽车型式批准框架
专栏一 欧盟关于自动驾驶汽车型式批准管理框架
1、欧洲议会和欧盟理事会法规(EU) 2018/858:从作用和内容来看,国内与之对应的是准入管理,作用上与《道路机动车辆生产准入许可管理条例(征求意见稿)》一致。
2、欧洲议会和欧盟理事会法规(EU) 2019/2144:主要是在各种安全(safety)相关项上细化了管理要求和技术法规(国内对应称之为强制性国家标准——纳入产品准入审查要求的)。其引用的技术标准和自动驾驶相关的主要是:
(1)L3自动驾驶系统:UN R157;
(2)L4自动驾驶系统:欧盟委员会实施条例(EU) 2022/1426,适用于小批量;
(3)正在起草中的,适用量产车上搭载的L4自动驾驶系统的新技术法规。
3、欧盟委员会实施法规(EU) 2022/1426:全称《全自动驾驶车辆自动驾驶系统(ADS)型式批准的统一程序和技术规范》,主要是如何批准搭载于小批量全自动驾驶汽车上的L4自动驾驶系统,包括行车功能(driving)和泊车功能(parking)。
4、欧盟委员会授权法规(EU) 2022/2236:全称《(EU) 2018/858法规附件I、II、IV和V修正案,涉及无限系列生产的车辆、小批量生产的车辆、小批量生产的全自动车辆和专用车辆的技术要求,以及软件更新》,主要是对858的修订,集中于整车型式批准管理上的修订:
(1)与安全(safety)相关的法规改成2144,具体技术法规引用在2144中体现,简化了流程,确保了在法规实施框架方面的统一。
(2)针对搭载L4自动驾驶系统进行了车辆类型上的扩大,从只适用于M1和N1,扩大到搭载L4自动驾驶系统的M2、M3、N2、N3也可以申请“欧盟小批量”型式批准模式。
(3)正式把UN R156引入到了欧盟型式批准中,进入到了858 COP的相关要求中。
此外,UNECE GRVA工作组FRAV(自动驾驶和自主车辆的功能要求)和VMAD(自动驾驶验证方法)正在分别制定《ADS安全验证监管要求和可验证标准指南》《自动驾驶全新评估和测试方法(NATM)》,旨在为ADS安全要求、测试与评估提供指导。
三、L3自动驾驶汽车安全法规:采用联合国法规
对L3自动驾驶汽车,欧盟将采用联合国法规——自动车道保持系统(R157,ALKS),涵盖高速公路低速应用的自动车道保持系统(ALKS)的型式批准,车辆在高速公路上以全自动模式运行。ALKS法规初始版本(00系)于2020年发布,2021年1月22日生效,最初的应用仅适用于乘用车,允许ALKS模式的最高速度为60km/h(37英里),特别适用于拥堵情况;2021年,该法规扩展到卡车和长途客车等重型车辆;2022年再次修订(01系),适用于时速高达130km/h(80英里)的ALKS系统,可以变道。R157法规包括系统安全和故障安全响应要求、人机交互、网络安全和软件升级、自动驾驶数据记录系统等规定。除了具体的安全要求外,R157法规还包括系统验证和测试的要求,其中,仿真工具和数学模型可用于验证安全概念,特别是对于难以在测试场地或真实驾驶条件下表示的场景。制造商必须证明仿真工具的范围、它们对相关场景的有效性以及对仿真工具链进行的验证(结果与物理测试的相关性)。与此同时,为了应对自动化和数字化快速增长的部署,ALKS还必须遵守R155网络安全、R156软件升级法规要求,该法规与R157同日生效。这两项法规不仅在投放市场时必须满足,而且在整个车辆生命周期中都必须满足。依据R157法规,2021年12月,德国联邦汽车运输管理局(KBA)批准梅赛德斯-奔驰面向S与EQS系列的ALKS系统。
四、L4自动驾驶车辆安全法规:欧盟和德国实践
关于SAE L4自动驾驶型式批准法规,目前UNECE尚未制定技术法规对其提出要求。这一监管空白促使欧盟率先独立制定自己的规则,针对SAE L4车辆型式批准的法律法规已在欧盟和德国生效。
(一)欧盟委员会实施法规(EU)2022/1426
欧盟委员会实施法规(EU)2022/1426《关于配备自动驾驶系统(ADS)的全自动驾驶车辆型式批准的统一程序和技术规范》,规定了欧盟通用安全法规(EU)2019/2144适用于高度自动驾驶车辆自动驾驶系统(ADS)型式批准的应用规则,用于对ADS进行型式批准,于2022年8月5日颁布,并于2022年9月15日生效。这里的重点是制造商需要向型式批准机构提交附件规定的必要信息和文件,以及计划的在用监测和报告(in-service monitoring and report)。欧盟委员会通过授权和实施法案制定的技术规则,在全自动驾驶车辆(L4)进入欧盟市场之前,“对它们的安全性和成熟度进行全面评估”。特别是,欧盟法规规定了制造商必须遵守的必要技术要求,以获得欧盟对L4自动驾驶轿车、客车、卡车的“型式批准”。这些可能是限定范围内运输乘客或货物的自动驾驶车辆,仅在固定起点和终点之间运行的自动穿梭车,或“自动代客泊车”,驾驶员可以将车辆留在下车区,然后车辆自行操控到可用的停车位。如果L4自动驾驶汽车符合欧盟法规的所有相关条件,则成员国授予的型式批准将允许车辆在整个欧盟销售。然而,鉴于允许全自动驾驶车辆上路的潜在安全影响,型式批准限制为小批量,即在整个欧盟范围内每个车型每年只能销售不超过1500辆,每个成员国每个车型只能销售不超过250辆。这一限制将在两年后进行审查,因为委员会表示将继续努力,在2024年7月之前进一步制定和通过欧盟“无限系列”全自动驾驶车辆整车型式批准的必要要求。欧盟也可能在UNECE的任何相关审议中根据自己的法规制定L4车辆的国际法规。
专栏二 (EU)2022/1426简介
(EU) 2022/1426法规适用于M类和N类全自动驾驶车辆的型式批准,涉及以下应用的自动驾驶系统:
“自动驾驶班车”,设计和制造的全自动驾驶车辆,包括具有双驾驶模式的车辆,在指定区域内运输乘客或货物。
“枢纽到枢纽”运输,涵盖全自动驾驶车辆或双模式车辆,设计和制造用于沿固定路线、固定行程起点和终点运输乘客或货物。
“自动代客泊车”,具有全自动驾驶模式的双驾驶模式车辆,可在预定义的停车设施中进行停车应用。如果适用的话,系统可以使用停车设施的外部基础设施(例如,位置标记、感知传感器)来执行动态驾驶任务。
制造商可以根据本法规对法规(EU)2018/858第2(3)条定义的车辆的自动驾驶系统申请单独批准或型式批准,前提是这些车辆符合本法规的要求。
除上述范围和具体定义外,该法规还规定了全自动驾驶汽车自动驾驶系统型式批准所需的管理规定和技术规范。
该法规的附件I提供了模型文档,用于根据ADS描述全自动驾驶车辆。附件二规定了正常和紧急操作以及故障情况下的性能要求、最小风险策略和最小风险状态、人机交互、功能和操作安全、网络安全
和软件更新、事件数据存储、手动驾驶模式、操作手动和定期技术监测。附件III包括要考虑的交通场景及其推导、ADS的行为能力、制造商安全概念和安全管理体系的评估、要执行的测试和模拟仿真测试工具以及车辆运行期间的措施。
“双驾驶模式车辆” 是指专门设计和制造了驾驶员座椅、由驾驶员在“手动驾驶模式”下驾驶以及由ADS在无人监管的“全自动驾驶模式”下由司机驾驶的全自动驾驶车辆。
(二)德国《自主驾驶法》和《自主驾驶汽车批准和运营条例》
2017年6月21日,德国公布《道路交通法》(StGV)第八修订案,允许具备高度自动驾驶或完全自动驾驶功能(highly or fully automated driving function)的车辆在公共道路上测试、运营。2021年7月28日,德国公布针对自主驾驶功能的《〈道路交通法〉和〈强制保险法〉的修订案-自主驾驶法》(GAF)公布,使得在公共道路交通中自主驾驶的车辆能够测试、运营。相应的《自主驾驶汽车批准和运营条例》(AFGBV)于2022年6月30日公布,进而建立了适用于特定运行区域的自主驾驶(L4)国家法律框架,其中规定了自主驾驶汽车的必要技术要求,限定运行区域的批准,以及获得自主驾驶汽车运营许可证的程序。与欧盟(EU) 2022/1426型式批准法规相比,GAF和AFGBV明确了在限定运行区域批准、道路机动车登记等方面的监管要求。1、自主驾驶法《自主驾驶法》是针对具有全自动驾驶功能的客车和货车的法规,将使SAE L4自主驾驶汽车能够获得德国的型式批准和运营许可。因此,不需要单独的许可、例外和要求,例如随时准备进行干预的安全驾驶员的存在。《自主驾驶法》是在国际层面出台统一法规之前的临时解决方案。同时,BMDV也在积极参与制定欧盟和UNECE层面的法规框架。设想的部署场景包括A点到B点的穿梭交通、人员运输(在固定路线上行驶的公交)、Hub2Hub运输(如两个配送中心之间)、非高峰时段以需求为导向的服务、第一英里或最后一英里的人员和/或货物运输、“双模式车辆”(如自动代客泊车AVP)。列举的场景表明,该法律主要解决在限定的运行区域内使用自主驾驶车辆的移动和运输服务(MaaS/TaaS)。2、自主驾驶汽车批准和运营条例为实现L4自主(无人驾驶)人员运输和货物运输的商业化,自主驾驶汽车须经过该条例规定的三个步骤的批准程序。一是由KBA根据L4车辆的技术要求颁发型式批准。自主驾驶汽车需要制造商从德国联邦汽车运输管理局(KBA)获得型式批准。该条例明确许可的程序框架、技术要求。制造商的申请需要提交详细的文件,例如关于符合技术要求的声明以及提供有关安全概念,并基于多支柱方法(审查和评估、模拟仿真、实际道路驾驶)验证履行情况。制造商还需要记录测试场景目录,涵盖测试参数和运行过程中可能对车辆产生的环境影响。在获得型式批准后,后续对车辆进行的修改需要获得KBA的许可。二是由根据国家法律负责的区域机构对限定设计运行范围(ODD,在地理上限制于指定环境)进行第二步批准。三是根据步骤一和步骤二的批准,以及符合要求的机动车责任保险,进行L4车辆的登记发牌。(三)德国和欧盟法规之间的主要异同随着GAF/AFGBV、实施法规(EU)2022/1426的生效,德国和欧盟允许符合SAE L4的自动驾驶申请型式批准。GAF和AFGBV明确旨在作为过渡解决方案,直到国际层面出现统一的法规。最初的应用预计将在复杂性较低的运行区域进行。因此,问题是国家法规是否或在何种程度上可能因法规(EU) 2022/1426而变得多余。共同点:GAF/AFGBV、实施条例(EU)2022/1426的应用案例几乎相同。国家和欧洲法规都可以通过模拟仿真来测试是否满足要求,模拟工具将通过实际测试进行验证。传感器技术在物体检测和分类方面的性能,需要通过实际测试中的模拟来确定,可以使用测试工具(软碰撞目标、移动平台、假人行人)。法规(EU) 2022/1426要求制造商证明全自动车辆在其整个使用寿命期间不会对限定运行区域内的车辆乘员和其他道路使用者造成不合理的安全风险。差异点:与法规(EU) 2022/1426不同,GAF和AFGBV不限于M类和N类车辆。此外,欧盟法规不涵盖ODD特定测试,ODD特定测试仅属于国家/地方级别的管辖范围,GAF和AFGBV还包含有关测试和随后激活自动或自主驾驶功能的法规。实际上,对于不属于M类和N类的车辆,例如L类的所谓LED轻型车辆,以及自动或自主驾驶功能的测试或后续激活,目前只有国家法规可以被应用。在所有其他情况下,申请人可以自行决定是否按照欧洲法律或国家法律进行。AFGBV还要求对限定运行区域进行单独的批准。
五、L2组合驾驶辅助:正在制定新的联合国技术法规
驾驶员控制辅助系统(Driver Control Assistance System,DCAS),可通过持续的横向和纵向运动控制支持协助人类驾驶员执行车辆动态控制,是高级驾驶辅助系统(ADAS)的子集。考虑到不同增强型DCAS向市场的扩展,UNECE制定关于持续纵向+横向控制的新法规——DCAS法规,旨在针对批准配备DCAS的车辆建立技术中立的统一和通用性规定,为任何ADAS提供最低安全要求,允许批准各种驾驶员控制辅助系统(法规适用于M类和N类车辆的DCAS型式批准),填补现有的监管空白。
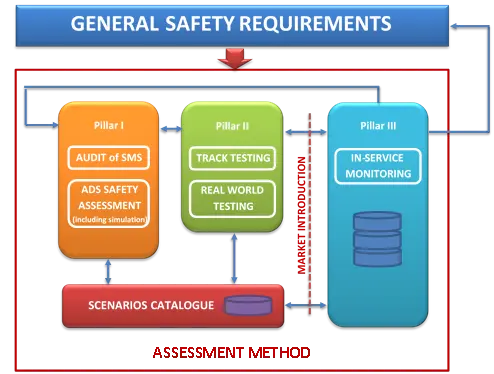
监管目标:DCAS致力于防止驾驶员误用或滥用的合理可预见风险。法规草案提出,应确保系统在其设计使用条件下提供稳定的控制;系统设有保障措施,保证驾驶员随时准备干预。因此,DCAS应提供足够的信息以使驾驶员能够监督所提供的帮助。DCAS将监测驾驶员(确保双手放在方向盘上或眼睛注视道路,甚至两者兼而有之),评估驾驶员的参与度,并通过向驾驶员发出明确的警告来对驾驶员缺乏参与度做出适当的反应。如果驾驶员没有对系统的警告做出反应并且没有采取必要的控制措施,它将使车辆完全停止。与NATM类似,DCAS法规中实施“多支柱”技术来评估DCAS。“多支柱”评估技术弥补了未直接评估的与DCAS运行用例相关的不确定性,从而覆盖了对DCAS多个运行用例的评估。制造商需要声明系统设计概要,这有助于向型式批准机构通报需要进行的必要评估和验证活动。考虑到DCAS中集成的功能和集成到车辆中的整个DCAS的功能和运行安全性,DCAS的验证应确保制造商在设计和开发过程中进行了全面评估。评估支柱包括通过加强对制造商文件的审查、模拟仿真测试、封闭场地和公共道路测试,以及制造商对DCAS运行的在用监测和报告来验证DCAS安全。DCAS的可用性及其协助能力受到限定的系统运行边界的限制,不同的需求适用于不同类型的DCAS功能,这应该通过测试用例来体现。
引入驾驶员控制辅助系统(DCAS),适用于横向和纵向运动控制辅助的任意组合的性能要求,而UN R79重点关注转向系统。相比于UN R79体系针对每一项功能都规定了细化的技术要求和性能指标,DCAS法规弱化性能指标的限制,采用更全面的合规性评估方法,与FRAV/VMAD中关于ADS通用要求/评估的讨论保持一致,由型式批准机构通过审查和评估、实车试验等验证方式对产品法规符合性进行确认。
专栏三 组合驾驶辅助系统型式批准法规框架
在2023年4月13日召开的GRVA/TF ADAS19次会议上,欧盟委员会提出应分阶段制定DCAS法规的提案,分阶段规划如下:
Phase 1,2023年9月GRVA审议:限定在L2 Hands-on,加速完善目前已在草案中有的功能项,例如自动换道、非结构化道路下的拨杆换道等;
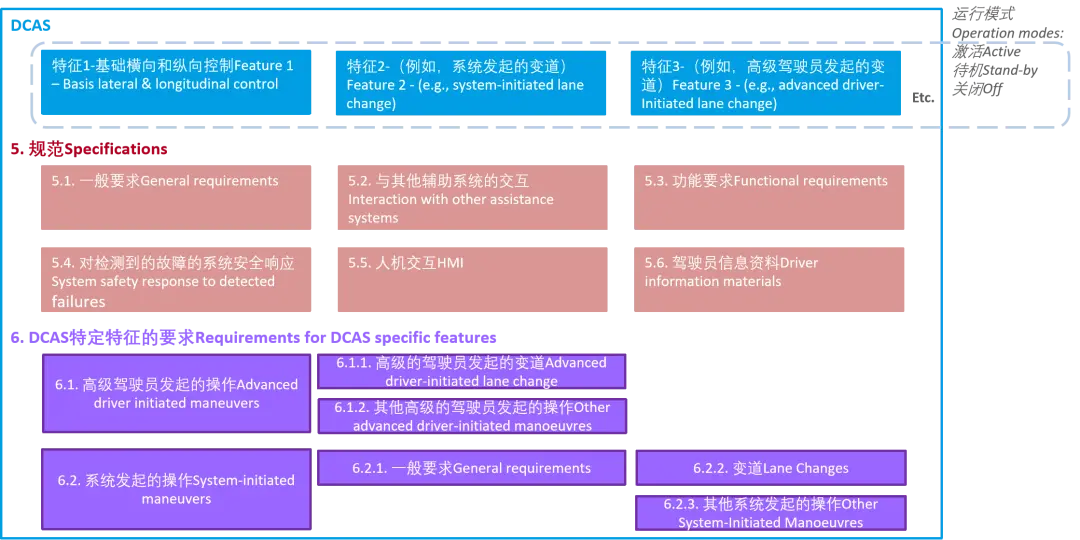
图1 DCAS法规草案主要内容框架(来源:17th GRVA)
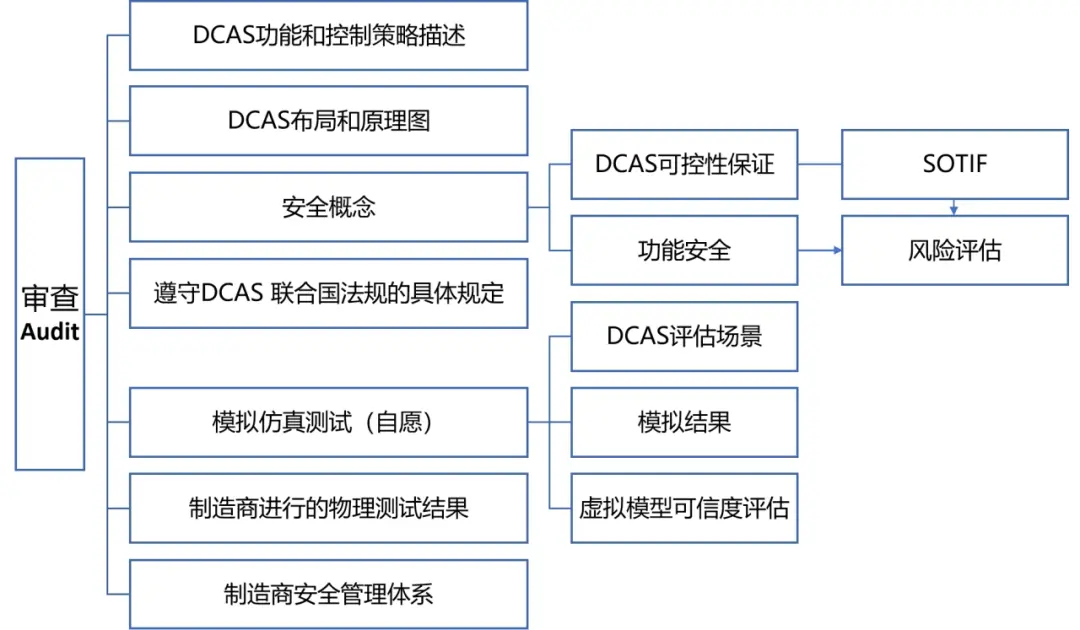
图2 DCAS验证-评估支柱:审查
六、总结
(一)在智能网联汽车型式批准技术法规的探索和实践中,对搭载驾驶员辅助控制系统或高级别自动驾驶系统的智能网联汽车,均建立安全框架要求和“多支柱”技术安全验证和评估方法,内容涵盖企业安全管理体系、产品技术要求、过程保障和测试安全验证、安全监测和报告等要求,以验证智能网联汽车系统安全和安全性能。
(二)在“多支柱”安全验证框架中,模拟仿真作为基本方法发挥着重要作用。R157法规、(EU)2022/1426法规DCAS(草案)等规定仿真工具和数学模型可用于验证安全概念,特别是对于难以在测试场地或真实驾驶条件下表示的场景;制造商必须证明仿真工具的范围、对相关场景的有效性,以及模型建模与仿真工具链置信度的评价框架等。
(三)开展实证是加快智能网联汽车安全验证、形成安全基准的重要途径。欧盟通过一系列智能网联汽车测试验证与安全评估等试点项目,同时采取同业界合作与协商的方法,为持续开展监管框架实践和探索提供有力支撑。



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
