




 广告
广告





















































时间跨度视角下的自动驾驶风险分类及应对策略

为了确保自动驾驶其实际运行的安全性,理解和管理与其相关的风险是至关重要的。在众多研究领域中,关注碰撞可能性是评估自动驾驶风险的主要指标之一。
在这个语境中,风险被定义为碰撞可能性和碰撞严重度的组合。碰撞可能性表征了车辆在行驶过程中与周围的交通参与者或障碍物发生碰撞的可能性。这可以是由于交通状况的复杂性,如繁忙的交通流或不可预见的行人行为,也可以是由于自动驾驶系统的局限性,如对环境条件的识别和反应能力。
而碰撞严重度则用于表征碰撞对驾驶员、乘客以及其他交通参与者造成伤害的严重程度。它反映了碰撞后可能产生的负面结果,包括物理伤害、财产损失和其他潜在的社会经济影响。
在此文中,我们将主要关注碰撞可能性,因为在自动驾驶系统的研发过程中,最首要的目标是确保系统能有效地避免碰撞,从而提高行驶安全性。通过深入理解和管理碰撞可能性,我们可以对自动驾驶风险进行更有效的控制,进而促进这项技术的进步和广泛接纳。

风险的重要性和其对自动驾驶的影响
在自动驾驶系统的研发过程中,风险管理尤其重要。自动驾驶系统需要在复杂多变的交通环境中行驶,其过程中的任何失误都可能导致严重的后果,包括人身伤害甚至死亡。因此,保证系统能有效地避免碰撞,从而提高行驶安全性,是自动驾驶系统开发的最首要目标。
首先,如果一个自动驾驶系统在实际运行过程中无法准确地判断和处理复杂交通环境中的风险,它很可能会造成交通事故,从而对人类生命和财产安全造成威胁。这不仅会导致个体伤害和损失,还可能导致公众对自动驾驶技术的信任度下降,从而影响这项技术的广泛接受和应用。
其次,风险管理也是提升自动驾驶技术性能的关键因素。一个高效的自动驾驶系统需要能够对环境中的各种风险进行快速、准确的识别和处理。这需要通过大量的数据训练和优化,以提高系统的识别精度和反应速度,从而降低碰撞的可能性。
此外,有效的风险管理还有助于自动驾驶技术的规范化和立法进程。通过对风险的深入理解和有效管理,我们可以为制定相关的法规和标准提供科学依据,进一步促进自动驾驶技术的发展和应用。
风险的重要性在自动驾驶系统的研发、应用和法规制定等方面都体现得淋漓尽致。我们必须对其进行深入的理解和有效的管理,以保证自动驾驶系统的安全运行,推动这项技术的进步,并促进其在社会中的广泛接受。

风险的分类:基于时间跨度的视角
自动驾驶风险的理解和管理需要考虑到时间跨度的因素。根据时间跨度的不同,我们可以将风险分类为以下三种类型:预期使用周期中的风险、一段行驶过程中的风险和场景中具体时刻的风险。下面我们将对这三种风险类型进行详细的阐述和分析。
预期使用周期中的风险:这类风险主要涵盖了自动驾驶系统在其整个生命周期中可能出现的风险,包括系统的设计、制造、使用和废弃等阶段。这需要我们从全局的角度去理解和评估风险,包括软硬件故障、系统更新、使用环境变化、驾驶数据隐私保护等多方面的问题。预期使用周期中的风险对自动驾驶系统的稳定性和持续性影响深远,需要我们进行长期的监控和管理。
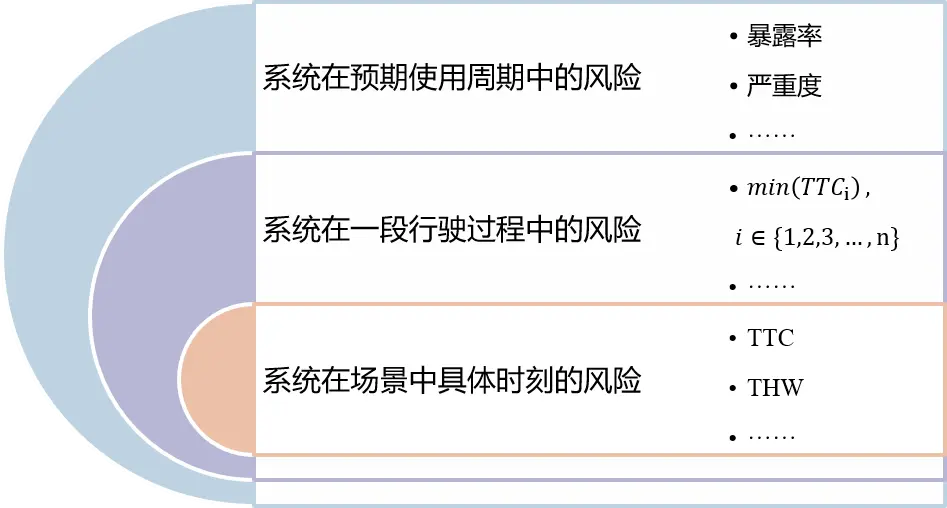
图1 风险分类(图片来源:同济智能汽车研究所)
一段行驶过程中的风险:这类风险主要关注的是系统在某个特定场景中的风险,如在特定的天气条件、道路类型、交通流量或者与特定的交通参与者(如行人、自行车、其他车辆等)共享道路时的风险。这类风险需要我们对系统在各种具体场景下的性能进行深入的理解和评估。
场景中具体时刻的风险:这类风险是对系统在行驶过程中所处场景的具体时刻的风险进行的考量,如在某一具体时刻,系统如何对突发事件做出反应。它需要我们对系统的实时决策能力进行评估,包括其对环境变化的感知、理解、预测以及应对能力的评估。
这三种风险类型涵盖了自动驾驶系统在不同时间跨度中可能面临的风险,提供了一个全面而深入的理解框架,有助于我们更有效地管理自动驾驶风险,从而提高系统的安全性和可靠性。

对各类风险的应对策略
为了降低自动驾驶风险并提高其运行的安全性和可靠性,我们需要根据不同的风险类型制定有效的应对策略。以下是针对我们刚才讨论的三种风险类型的应对策略:
预期使用周期中的风险:对于这类风险,我们需要在系统的设计和制造阶段就引入严格的质量控制和安全审计机制,以确保硬件和软件的安全性和可靠性。同时,需要建立及时有效的系统更新机制,以便对新出现的风险进行应对。在系统的使用阶段,需要进行持续的风险监控和管理,包括但不限于对系统的使用环境、驾驶数据等进行长期的跟踪和评估。
一段行驶过程中的风险:对于这类风险,我们需要通过大量的实验和模拟测试,让自动驾驶系统在各种不同的场景中进行学习和训练,提高其对复杂环境的处理能力。同时,也需要设计和实施有效的应急响应机制,以便在出现突发情况时能够迅速进行处理。
场景中具体时刻的风险:对于这类风险,需要进一步提高自动驾驶系统的实时感知、理解、预测和决策能力。这需要我们引入更先进的算法和技术,如深度学习、强化学习等,以提高系统的决策精度和速度。同时,也需要引入更高级别的冗余和保护机制,以增强系统在面对未知和突发情况时的稳定性和可靠性。
以上的应对策略只是一种初步的思考,针对不同的自动驾驶系统和具体的使用环境,可能需要设计更为特定和详细的应对策略。然而,无论如何,风险管理应始终是自动驾驶系统研发和使用过程中的重要部分,以确保其安全性和可靠性。
总结随着自动驾驶技术的不断发展和应用,风险管理在其中的角色越来越重要。通过本文的讨论,我们对自动驾驶风险的理解有了更全面的认识。明确了风险是碰撞可能性和碰撞严重度的组合,其中碰撞可能性是我们主要关注的研究领域。
我们也理解了风险在自动驾驶系统的研发、运行和社会接受程度等方面的重要影响,以及如何通过时间跨度视角对风险进行分类,包括预期使用周期中的风险、一段行驶过程中的风险和场景中具体时刻的风险。
更重要的是,我们讨论了如何针对不同类型的风险制定和实施有效的应对策略,包括质量控制、系统更新、风险监控、应急响应、算法优化和系统冗余等方面的方法。
只有深入理解风险并实施有效的风险管理策略,我们才能真正实现自动驾驶的安全性和可靠性,推动其在社会中的广泛应用。未来的研究将继续关注和深入这些领域,帮助我们更好地理解和管理自动驾驶风险,为实现安全、智能和高效的交通出行提供支持。



编辑推荐




最新资讯
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
-
迄今为止最先进的版本:imc发布全新imc STU
2025-04-23 17:06
