




 广告
广告





















































自动驾驶协同测试白皮书 | 基于需求的整车在环测试VIL

2022年ASAM Evolving Landscapes of Collaborative Testing for ADAS & AD白皮书正式发布。前序推文为读者梳理了相关测试用例中的数据回放,本篇将详细介绍基于需求的整车在环测试VIL。
01
整车在环测试
在汽车行业中,驾驶员和乘客的人身安全至关重要,随着高级安全和自动驾驶程序变得越来越复杂和相互依赖,模拟测试已经到达极限,而道路测试既昂贵又耗时。
整车在环测试(Vehicle-in-the-Loop Testing,VIL)填补了这一空白,它是一种基于半实物仿真技术的测试方法,通常在一个封闭场地内实现任意开放道路的集成测试,以满足智能驾驶车辆在环测试系统的测试需求。
自动驾驶整车在环测试系统是一个联合测试系统,其中包括真实车辆和虚拟仿真,这个测试方法能够实现大部分的真实测试需求,并可以对2D和3D感知环境进行精确仿真控制。
通常,VIL测试极其复杂,需要测试人员创建可准确代表真实情境的模拟环境。VIL环境包括交通、道路标志、道路标记等。
测试设备将模拟环境呈现给真实车辆,也就是说,测试人员在测试道路上驾驶车辆,但传感器的输入来自模拟环境。

VIL测试
整车在环测试方法的优势是在封闭场地内还原开放道路的场景,降低实际道路测试的风险性和难度,同时降低测试的成本和时间,减少对场地、真实交通和试验车辆的需求。
02
测试用例
下面介绍基于需求的整车在环测试的相关测试用例,重点介绍在未改装车辆上执行整车在环测试。
通常,专门采用OTA(over-the-air)技术来模拟传感器以代替使用数据注入(data injection),以此评估整个传感器组(the full sensor set)和整个效应链(the complete chain of effects),包括传感器和整个软件堆栈的物理特性(the physics of the sensor and the full software stack),该技术可以测试出完整的系统反应。
设置VIL测试环境
OTA技术也可使ADAS功能的整车在环测试应用于定期技术检查(periodical technical inspections,PTI)和生产测试(production testing)。
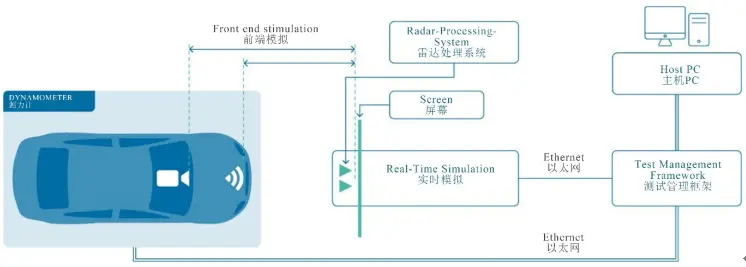
对ADAS功能进行VIL测试的测试思路包括如下图所示四个部分:
VIL测试环境测试用例
测试中的硬件包括:实时模拟器(real-time simulator)、滚筒式试验台(roller test stand)、OTA摄像头模拟(OTA camera simulation)、OTA雷达模拟(OTA radar simulation)和OBD接口(OBD interface)。
软件包括:场景模拟(scenario simulation)、硬件接口与控制(hardware interfacing and control)、数据库接口(database interfacing)、测试自动化(test automation)、自动报告生成(automatic report generation)和用户界面(user interface)。
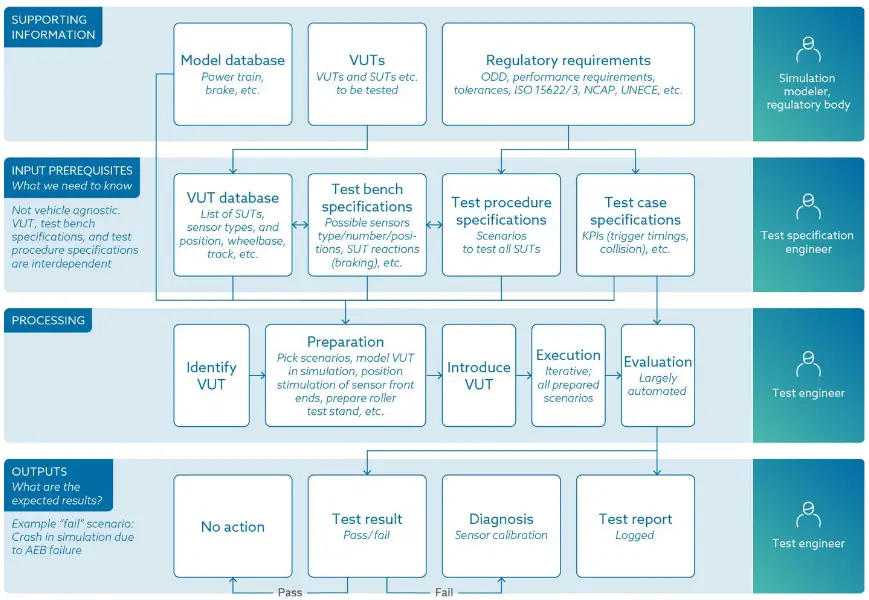
在实时测试的过程中,第一步必须定义要测试的驾驶功能,并且必须由模型师或法规制定需求。然后,测试规范工程师推导出测试规范和场景以满足需求。
第二步,基于上述和选定的被测车辆(VUT),组装由多个硬件和软件组件组成的测试台架,并建立持续维护的被测车辆数据库和测试规范详情。
执行测试前,先使用数据库预处理特定被测车辆的测试台架。然后由测试工程师根据驾驶功能全自动或半手动执行测试。
最后,评估测试结果,并将这些结果与测试用例规范相匹配,生成测试报告。根据应用领域的不同,该测试报告可能更为详细,也可能只为通过/失败。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
