




 广告
广告





















































自动驾驶协同测试白皮书 | 基于场景的SIL闭环测试

2022年ASAM Evolving Landscapes of Collaborative Testing for ADAS & AD白皮书正式发布。前序推文为读者梳理了基于需求的整车在环测试VIL,本篇将详细介绍基于场景的SIL闭环测试。
01
测试的思路和目标
本篇将介绍基于场景的SIL闭环测试用例。主要以车辆的虚拟电子控制单元(V-ECU,virtual electronic control unit)基于摄像头的自动车道保持系统(ALKS,automated lane keeping system)为例。
该项测试侧重于预期功能安全(SOTIF,safety of the intended function,ISO DPAS 21448)的技术方面,以对未知风险进行正风险平衡。
测试思路是在闭环软件在环测试台架中比较ALKS和驾驶员的能力。被测系统(SUT)是基于摄像头的ALKS闭环系统,作为V-ECU形式的软件堆栈。驾驶员、车辆和驾驶环境都是虚拟的,并且以模型、场景和地图数据的方式实现。
测试目标是通过探索和生成场景来发现未知风险,并最终提供证据,以证明与驾驶员相比,ALKS在这些场景中具有正风险平衡。
基于场景的SIL测试用例
02
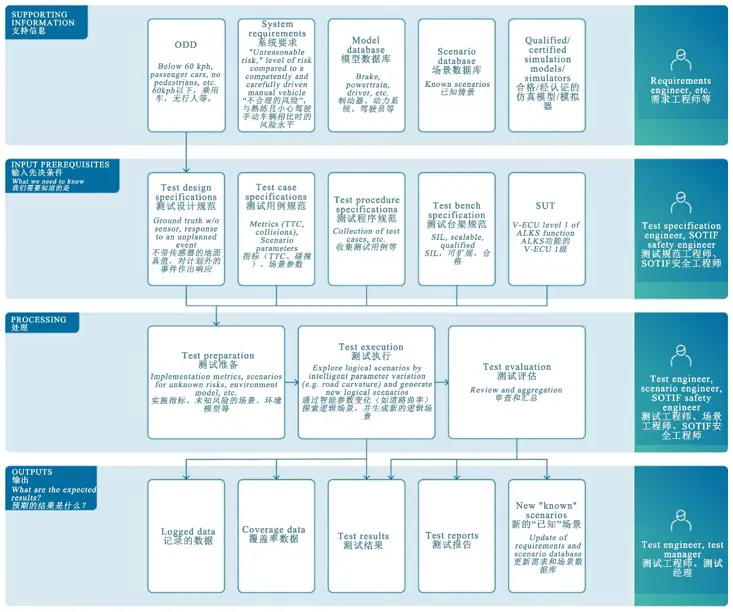
测试的设置和处理
作为系统要求的支持信息和数据,需要使用设计运行范围(ODD)、场景数据库(scenario database)、可信的仿真模型(credible simulation models)和合格工具(qualified tools,如模拟器)来定义和实施测试规范。
比如,系统要求表明与合格的驾驶员相比,重点在于证明ALKS没有引入不合理的风险,则设计运行范围适用于速度低于60kph的情况,预计道路上没有行人(例如高速公路),其目的仅在于将ALKS用于乘用车。
重点的是输入先决条件,将所有的支持信息转化为完整且一致的测试规范。
测试设计规范为“规定待测功能及其相应测试条件的文档”[ISO 29119]。
测试用例规范为“一组一个或多个测试用例的文档” [ISO 29119],该规定包含具体场景和一个或多个评估标准的具体测试用例。例如,具有不同的场景/地图参数。
测试程序规范为“规定一个或多个测试程序的文档,这些测试程序是为特定目标执行的测试用例集合”[ISO 29119]。此外,测试程序规范还可以规定零个或多个测试台架配置,用于执行测试用例。
处理阶段分为测试准备、测试执行和测试评估三个步骤。在准备阶段,根据给出的测试规范将所有指定的指标、模型和场景落实到位。
在测试执行期间,执行许多次模拟运行,每次运行都在新的具体场景上执行。通过逻辑场景/地图的参数变化(如道路曲率)来创建具体场景。
在测试评估期间,将规定的指标应用于模拟结果,以产生测试结果并从所有测试结果中得出汇总信息。
03
测试的输出和测试需求
执行和评估测试时,会产生多组测试结果和数据以供分析。通过这种方式,可以检测到非预期的自动车道保持系统行为,并对行为进行分析,最终由自动车道保持系统开发团队进行改进。
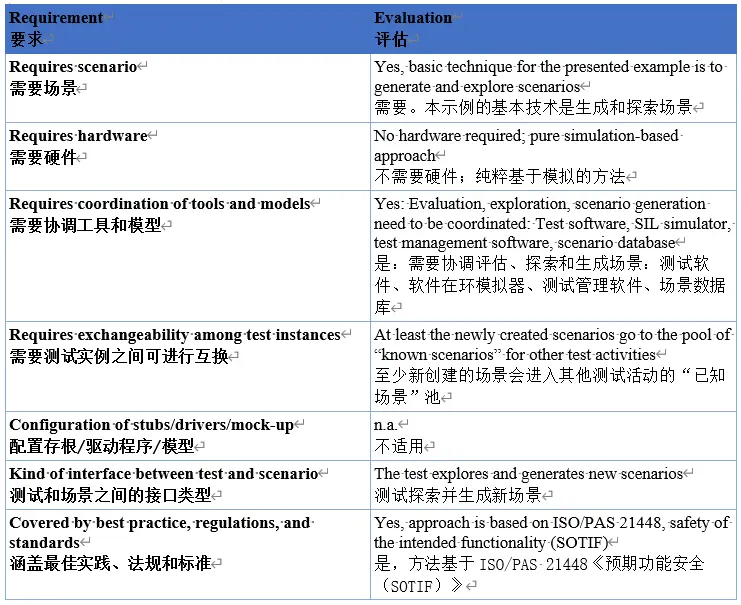
该项测试的有关测试规范如下:
04
测试拓展
基于场景的SIL测试可以有多个方便的拓展。
比如,测试紧急制动辅助装置对某些场景操作的反应,测试的焦点是从测试用例触发到场景以执行后续操作步骤,实现测试用例和场景的强耦合。
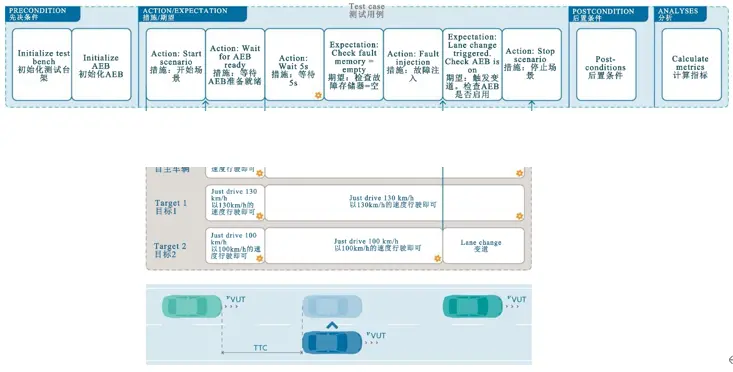
测试紧急制动辅助装置
再比如,针对不同场景对ALKS进行测试,测试的焦点是在不同的场景下执行一个测试用例,或在不同的测试用例中执行同一个场景。
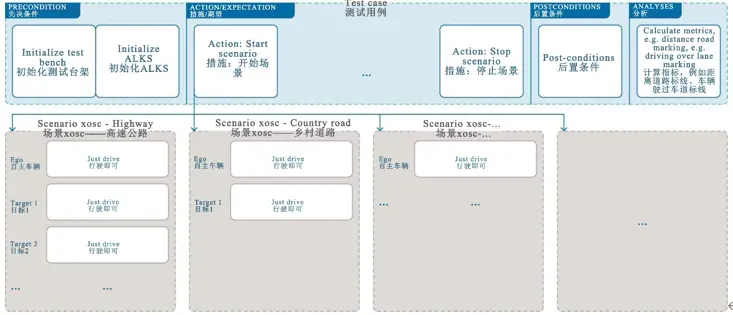
在不同场景下重复使用测试用例
对比不同的测试用例可以发现,在某些情况下,测试用例和场景或多或少地相互耦合。具体的耦合类型部分为工具特定和专有的类型,因此不能在工具之间进行转移。
为了更好地进行转移和维护,可以对耦合进行标准化,即可以使用和扩展现有标准,如 OpenDrive、OpenScenario、XIL和OSI。







最新资讯
-
国内现货!GRAS 46AE/146AE 限时优惠直降 5
2025-04-22 16:22
-
仿真测试必要性及标准法规
2025-04-22 16:22
-
福特退出中国,进入倒计时!
2025-04-22 16:21
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
