




 广告
广告





















































自动驾驶协同测试白皮书 | 机器学习在自动驾驶测试中的应用

2022年ASAM Evolving Landscapes of Collaborative Testing for ADAS & AD白皮书正式发布。前序推文为读者梳理了基于场景的SIL闭环测试,本篇将详细介绍机器学习在自动驾驶测试中的应用。
01
机器学习促进自动驾驶发展
机器学习(Machine Learning)是让计算机像人类一样学习和行动的科学,以观察和现实世界互动的形式向终端提供数据和信息,通过不断的自主学习实现理想目标。
机器学习已经成为改变汽车行业的突破性技术。车辆在驾驶时会遇到多种随意、复杂的情况,不可能对自动驾驶系统手动封装和定义指示安全、有效驾驶的通用规则,而机器学习能够从数据中自动学习复杂的规则,已成为创建ADAS/AD的主要方法。
特别是对于高度自动化的车辆,如SAE 4级或5级的车辆,使用机器学习方法意味着人工智能应用程序可以在测试期间实时处理、选择或提取和解释数据,同时监控自身。

02
机器学习的开发
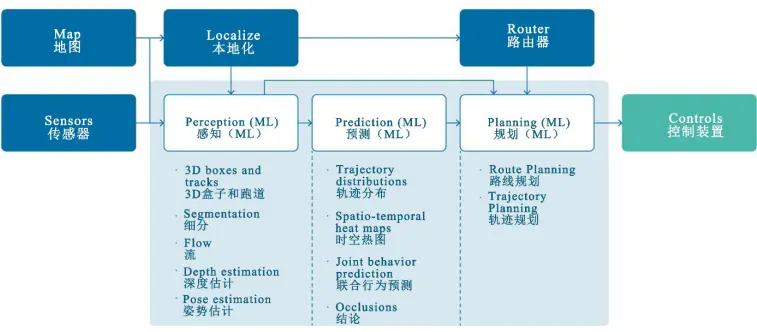
机器学习在自动驾驶汽车的开发和运营中发挥着关键作用。在ADAS/AD系统中,机器学习通常在不同程度上采取场景理解(scene understanding)和本车规划(ego-vehicle planning)的形式。
场景理解和感知可以了解世界并在模型中重新创建世界,包括感知(perception)和行为预测(behavior prediction)两个步骤。
运动/轨迹规划(Motion/trajectory planning)是使用模型作为世界代理(a proxy for the world)进行导航。
机器学习在自动驾驶中的应用
机器学习在自动驾驶中的应用主要按照数据采集标注、数据拆分训练和评估的步骤来创建机器学习模块。收集数据模块如下图所示:
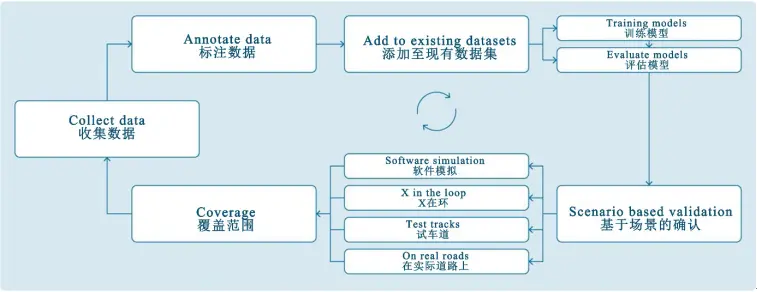
机器学习开发中的收集数据模块
对ADAS/AD进行机器学习开发时,需要使用不同的驾驶数据。理想情况下,在相关设计运行范围中部署后可能出现的每个场景都以统计学意义上的方式出现在数据集中。
但是,由于缺乏可靠的方法来衡量和利用多样性覆盖率,需要进行直接测试以确保没有遗漏任何内容。在实践中,测试通过两种方式表现出来:高里程(high milage)道路测试,或者组合参数值创建场景。
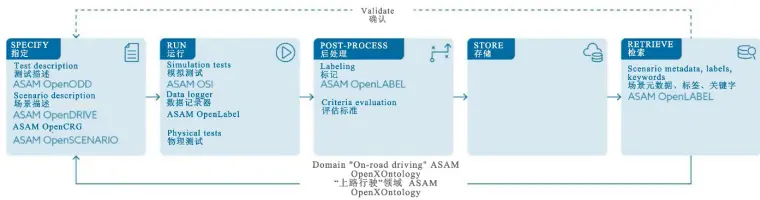
基于场景的测试(使用ASAM OpenX)
当前,虽然在测试ADAS/AD车辆的机器学习模块方面取得了一定进展,但这些模块都不够完美,仍需在下面几个领域取得突破:
①严格的流程:以确保设计的运行范围和预期功能与数据规范、数据和机器学习架构的选择、训练、评估和监控保持一致。这意味着要制定明确的步骤来确保机器学习模型在所有情况下都能表现良好,并且能够满足业务需求。
②数据规范:必须与设计运行范围和预期功能保持一致。所面临的挑战是如何使OpenLabel能够适应各种特征(视觉、空间关系、时间和因果关系)。
③地图数据(Mapping data):设计运行范围的代表性,以确保足够的范围覆盖。
④未建模概念(Unmodeled concepts):潜在的解决方案可能包括保持包括更多对象的OpenXOntology开放。OpenLabel可以支持未知对象,例如,如果任何对象不符合描述,则用集装箱将对象封装。
⑤扩充数据:通过生成合成数据来扩充数据,以填补数据多样性的空白。这意味着人为地增加关于缺失内容的训练数据——调整大小、旋转、亮度。
⑥真实的图形:需要采用真实的图形来确认模拟中基于感知的机器学习模块。此外,自动驾驶汽车的广泛采用需要制定全面的法规和法律框架,以确保对安全、责任和道德考量得到充分解决,这需要对人工智能增加信任。
自动驾驶车辆对安全至关重要,因此必须证明车辆安全,这就增加了包括政府和公众在内的所有利益相关者的信任,必须可以解释基于人工智能的系统,以便理解和评估系统的行为。同时,系统必须能够抵御对抗性攻击和输入数据中可能由自然因素引起的干扰,例如传感器上轻微的积雪或污垢。
自动驾驶汽车和机器学习的未来充满希望。机器学习有助于从驾驶数据中获取线索,以及将数百万个场景缩减为与给定设计运行范围相关的几个场景。期待在机器学习的支持下,自动驾驶汽车突破已有的交通方式。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
