




 广告
广告





















































是什么卡住了自动驾驶的脖子——自动驾驶技术瓶颈分析

作者:北斗(10年智能座舱及导航娱乐系统开发管理经验、3年自动驾驶产品化经验、5年自动驾驶模拟仿真测试环境构建经验)
随着智能驾驶车辆的逐步普及,越来越多的驾驶者正在体验智能驾驶系统给他们带来的便捷与安全。在市场消费者已经尝到智能驾驶技术所带来甜蜜享受后,随之而来的就会有更多的市场呼声,针对高阶智能驾驶驾驶甚至是完全自动驾驶的落地也越来越值得期待。
目前自动驾驶技术发展到一个相对较高的水平。在新闻中每周都能发掘自动驾驶技术的进步发展信息。自动驾驶企业一直在通过公路行驶验证、行驶服务验证、系统模拟仿真等,踏实地克服各种困难,不断提高产品品质。那目前真正影响自动驾驶技术的瓶颈都有哪些呢。
本文将从自动驾驶技术角度出发,对自动驾驶技术的弱点进行分析说明,理性的梳理自动驾驶系统技术中的瓶颈,同时提出部分解决方案供各位读者参考。
■ 黑客袭击自动驾驶车辆的风险日益高涨
自动驾驶系统属于典型的智能网联技术应用,目前正向着“车-路-云 ”互通互联的方向进行推动和发展。搭载自动驾驶系统的自动驾驶车辆在很多情况下需要进行数据通信,可以说车辆与网络的连接是系统高频使用的一个刚需。自动驾驶系统可以通过远程监控系统、基础设施协调管理系统、V2X通信、云端服务器数据交互等各种途径,进行数据信息的实时收集,确保信息的新鲜、全面,提高自动驾驶系统的精准度与功能能力范围。

图1 自动驾驶系统涉及的无线网联系统示例图(图片来源https://www.invc.news/)
在2019年,梅赛德斯-奔驰和宝马集团联合开发的“Share Now”共享服务汽车,在美国被黑客袭击,发生了100多辆车辆被盗事件。网联化在给自动驾驶车辆带来便利性的同时,也像与电脑等一样经常受到黑客攻击的威胁。一旦自动驾驶车辆遭受黑客攻击,其损失不像咱们使用的电脑那样,仅仅是电脑中的数据和文件等,而是整个车辆被黑客劫持。在车辆失去控制权之后,车辆对周围环境中的人和事物产生危害的程度和风险是无评估的,更无法进行管控。想象一下,一觉醒来,有100台车在马路上横冲直撞完全失控的场景,这是一件很可怕的事情。
正因如此,网络安全正在被各大自动驾驶技术研发公司所重视。从技术层面千方百计地采取相关对策,强化网络安全。目前各家公司都在争分夺秒的努力,尽快功课车辆网联安全课题。
■自动驾驶通信不畅的后果严重
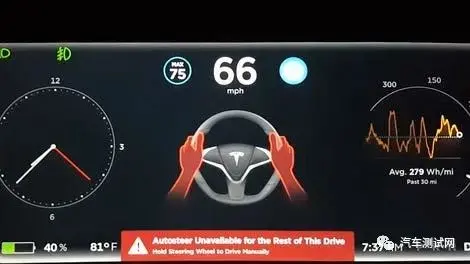
刚才我们提到了黑客攻击、汽车失控这些可怕的极端场景。先稳定下情绪,这些场景都是发生在极端的情况之下的,发生概率还是很小的,更多的时候,咱们的自动驾驶系统还是没有那么多坏人捣乱的。一般咱们的自动驾驶系统会在车辆行驶过程中,基于5G移动通信网络与各种设备进行数据交互,数据会从云端服务器传输给终端。那么如何确保无线通信可以持续的保持高速、实时、稳定的大量数据传输,就成为系统通信方面的重中之重。
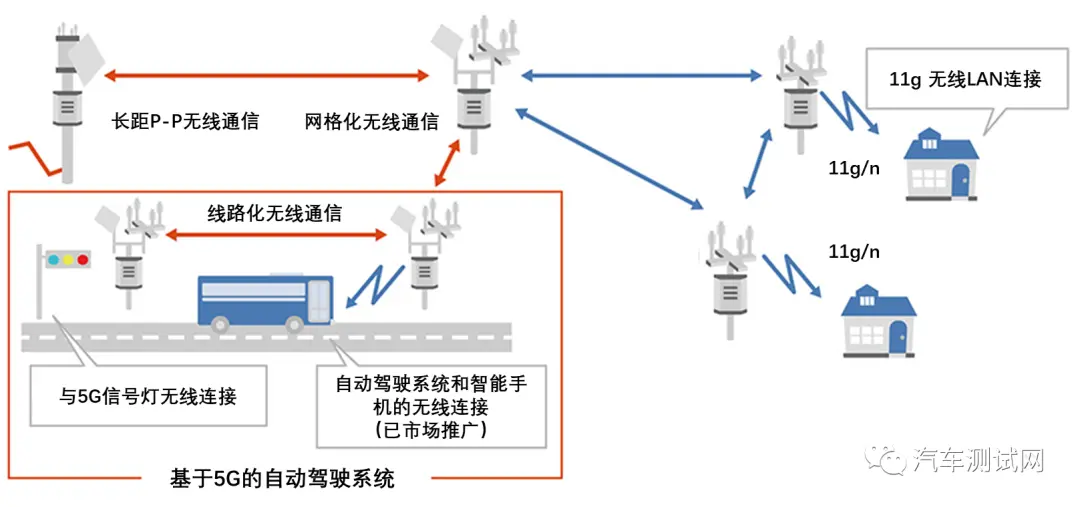
图2 自动驾驶系统涉及的无线网联系统示例图 (图片来源https://kakakumag.com/)
遥想2019年,我在神户观看盛大的烟花大会表演,由于现场人数众多,基站通信异常导致和家人联系不上的焦急心情。那如果这种情况发生在自动驾驶汽车上会是怎样呢。从目前开发实践角度上看,多数情况下,自动驾驶车辆在没有网络连接的状态下,将无法继续安全的自动行驶,但由于车辆还有本地感知能力,所以也不会立即陷入不安全的状况。在L4等级的自动驾驶车辆中,通信终端时点开始,所处环境即成为了ODD(运行设计领域)外的场所。作为紧急安全措施,车辆一般会自动停靠到路边,等待进一步处理。如果是L3等级的自动驾驶车辆,车上本身就有驾驶员,网络通信故障发生后,有驾驶员介入即可。
即便如此,自动驾驶车辆采取了类似靠边停车的安全措施,也不能完全规避其他车辆因自车异常驾驶行为导致的交通事故发生风险。而且类似这种服务器故障,由于管理服务器也会传输控制指令,所以异常故障也可能导致锁死并冻结处理,使之无法行驶。
在2022年6月,美国通用汽车Cruise的自动驾驶汽车因服务器故障一度导致多辆车失去正常行为,停在旧金山的一条街道上,造成了几个小时的交通堵塞,直到工作人员将这些车辆开走之后问题才得以解决。现场可能通过重启系统、远程控制都无法解决问题,才会派工作人员到现场紧急处理。在通信发生故障的时候,这种情况也可能产生。
所以在自动驾驶系统设计中,通信系统和服务器管理系统等重要关键组件的冗余化设计是非常必要的。这些设计可能在异常发生时,进行核心功能的补位,确保系统继续正常运行。
■自动驾驶系统AI处理能力问题
不知道从什么时候开始,自动驾驶的进化和人工智能(AI)技术捆绑到了一起,那么AI的进化程度和处理能力肯定是另一大悬念。在自动驾驶中,AI技术被运用于对感知传感器采集数据的识别、分析上,自动驾驶系统会基于分析结果,进行车辆控制执行。AI通过对拍摄的目标特性进行分析,持续不断学习,直到能快速对目标进行识别和分类。
那么,对于数据采集过程中,部分特征缺失的物体,或是AI未知的物体,AI是否也能正确的进行处理呢。目前开发实践中,基于传感器融合进行环境感知,当不同类型传感器,提供不同的识别结果时,就需要看系统对哪个类型的传感器置信度最高,来进行目标判读和执行处理了。

另外,如何让自动驾驶系统准确识别非标准特性的目标也是个课题。假设在路标上贴上小广告等,影响了目标特征。这种情况让AI进行识别,的确是有点为难AI,但这种情况在实际生活中也是屡见不鲜的,甚至有些道路旁绿化带遮挡信号灯,让信号灯在树丛中若隐若现。像这种让驾驶员都挠头的场景,AI是否可以轻松拿捏。
答案是短期内绝对不可能。AI暂时还没有只能到完全意义上无师自通,而在某种特殊场景下,我们作为老师,其实也没有办法进行完全正确的判断。己所不欲勿施于人,更何况是AI呢。所以多传感器、多信息来源基础上的环境数据判断是自动驾驶技术可能要持续探究和发展的一个重点。
■系统手动驾驶接管的不稳定因素
目前国内已经有很多车企提供了搭载L3等级自动驾驶系统的车辆。这类自动驾驶系统可以在一定条件下实现自动驾驶,所谓条件也就是ODD(运行设计领域)在从不满足ODD条件或者系统判断自动驾驶困难的情况下,要求驾驶员手动接管车辆控制。
对于这种请求,驾驶员必须做出快速响应,否则可能诱发安全事故。而对自动驾驶系统而言这种请求其实是条件触发的非确定性执行操作,也就是说自动驾驶系统无法预知什么时候需要驾驶员帮助开一会儿,更无法提前和驾驶员沟通是否驾驶员现在方面帮他开一会儿。
这听上去有点像个人车互动的笑话,但实际发生的话可能并不是那么有趣。在高阶自动驾驶系统发出接管请求后,驾驶员如果没有及时相应请求,作为风险管控措施,系统会控制车辆靠边停车。但不是所有车辆都搭载了高阶自动驾驶系统,在L3等级和L3等级以下的自动驾驶系统中,系统更多的是辅助驾驶属性,如果驾驶员对接管请求置之不理,可能会发生比较严重的交通事故。
即使驾驶员对接管请求做出了及时的响应,也可能无法快速接续控制已经发生的驾驶环境。这种情况需要驾驶员快速进入驾驶状态,并且迅速了解掌握当前车辆行驶环境。其实这点多数情况下还是存在一定相对难度的,毕竟系统搞不定了,而且交接时间要求也比较快。而且自动驾驶系统对于请求接管的判定程度上有没有留有余裕,有没有耍小聪明偷懒不想开车呢,这些问题都给手动驾驶接管操作执行抽出了更多的不确定因素。
■ 总结
自动驾驶系统在应用中除了上述几点,还有成本角度、社会角度等方面的课题和瓶颈,虽然自动驾驶技术还存在着各种各样的课题和瓶颈,但在世界范围内自动驾驶技术领域都在为解决这些问题进行着不屑的努力。从上述几个问题来看,自动驾驶车辆的安全性在各个方面都还有很大的提升空间,目前仅仅因为一些暂时性的瓶颈无法解决。但从自动驾驶技术应用领域上,自动驾驶技术已经得到了充分应用和长足发展,为后续自动驾驶系统普及奠定了非常坚实的基础,也期待领域内专家早日攻克难题,打破瓶颈给自动驾驶创造一份自由呼吸的创新环境。
- 下一篇:自动驾驶汽车测试场景库构建方法
- 上一篇:直播|如何结合自动驾驶场景判定雷达性能?



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
