




 广告
广告





















































自动驾驶汽车测试场景库构建方法


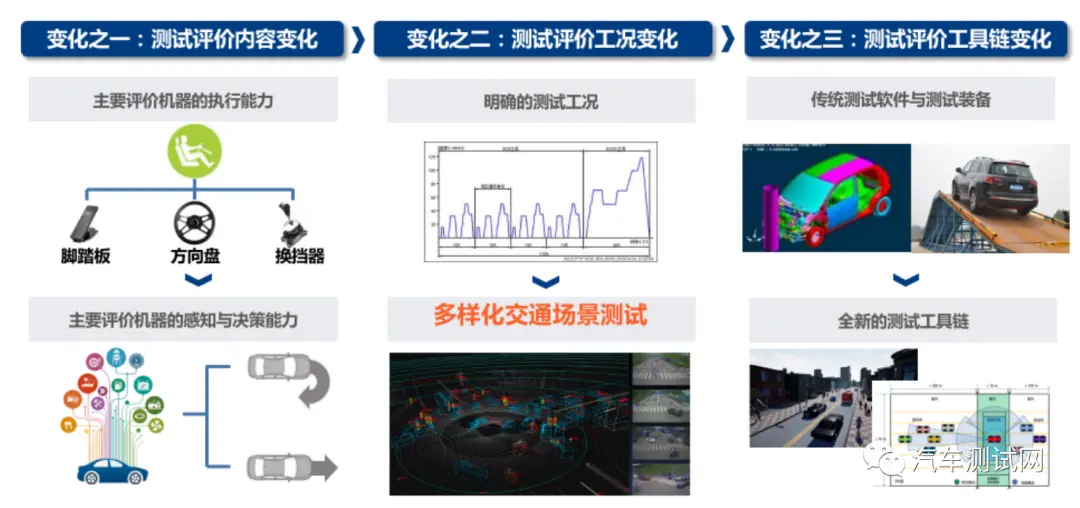
自动驾驶的发展过程就是驾驶员驾驶操作逐渐退出的过程,原本由驾驶员完成的“感知-决策-执行”动作逐渐要由车辆替代完成,自动驾驶汽车的研究重点已经从自动驾驶技术的突破与实现逐渐向自动驾驶功能的测试评价技术转移。
根据美国交通部公布的数据,驾驶员需要行驶约80万km才会发生一起碰撞事故,平均需要驾驶车辆35年。美国密歇根大学彭辉教授提出,自动驾驶汽车99%的测试验证工作应在虚拟环境中完成,0.9%应在实际场地环境中完成,最后少部分在公共交通环境中完成。虚拟测试将是自动驾驶汽车测试验证的主要方式,而场景是虚拟测试的基础。
1、测试场景定义与作用
(1)自动驾驶测试场景定义
自动驾驶测试场景定义是指在评估自动驾驶汽车性能时所创建的特定环境或情境。这些场景旨在涵盖各种驾驶条件和情境,以确保自动驾驶系统在不同情境下(如:其它车辆、道路、交通设施、气象条件等元素综合交互过程的一种动态)能够安全、可靠地操作。

基于场景的测试体系
(2)自动驾驶测试场景作用
场景是从空间和时间维度描述人-车-路-环境之间复杂动态关系的模型,是自动驾驶汽车产品研发和功能测试的基础;
基于场景的自动驾驶汽车测试方法是实现加速测试、加速评价的有效途径;
测试、验证、评价自动驾驶功能与性能的关键,贯穿自动驾驶车辆研发测试全生命周期。
(3)自动驾驶测试场景开发流程
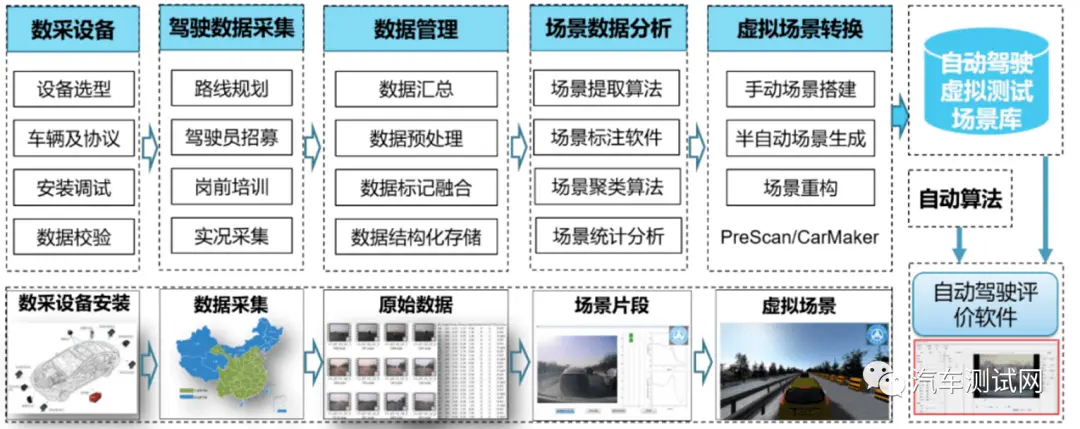
自动驾驶测试场景开发流程包括以下关键步骤:收集地图和道路数据(原始数据采集),构建虚拟测试环境(场景库构建),并创建模拟车辆动态行为模型(自动驾驶汽车性能数据)进行仿真测试,通过模拟车辆在各种场景下的行为,评估自动驾驶系统的性能。

2、测试场景要素
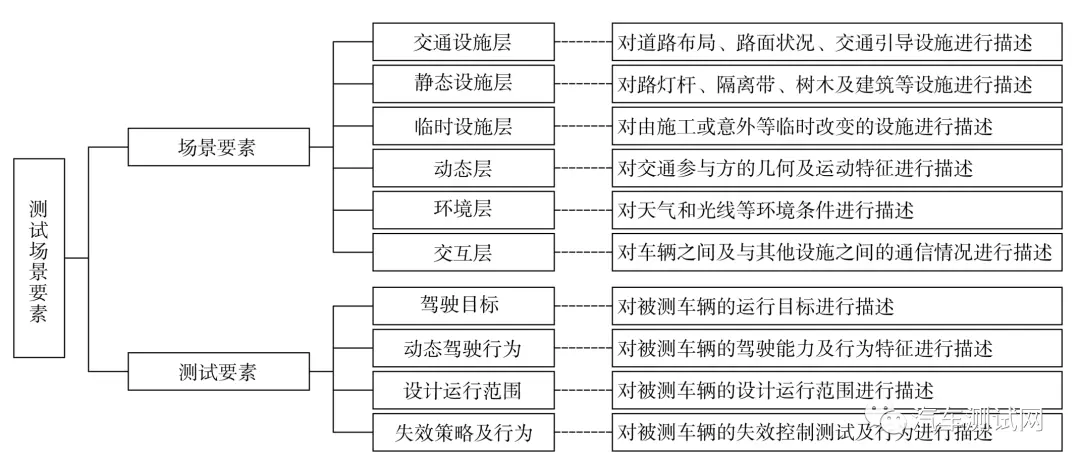
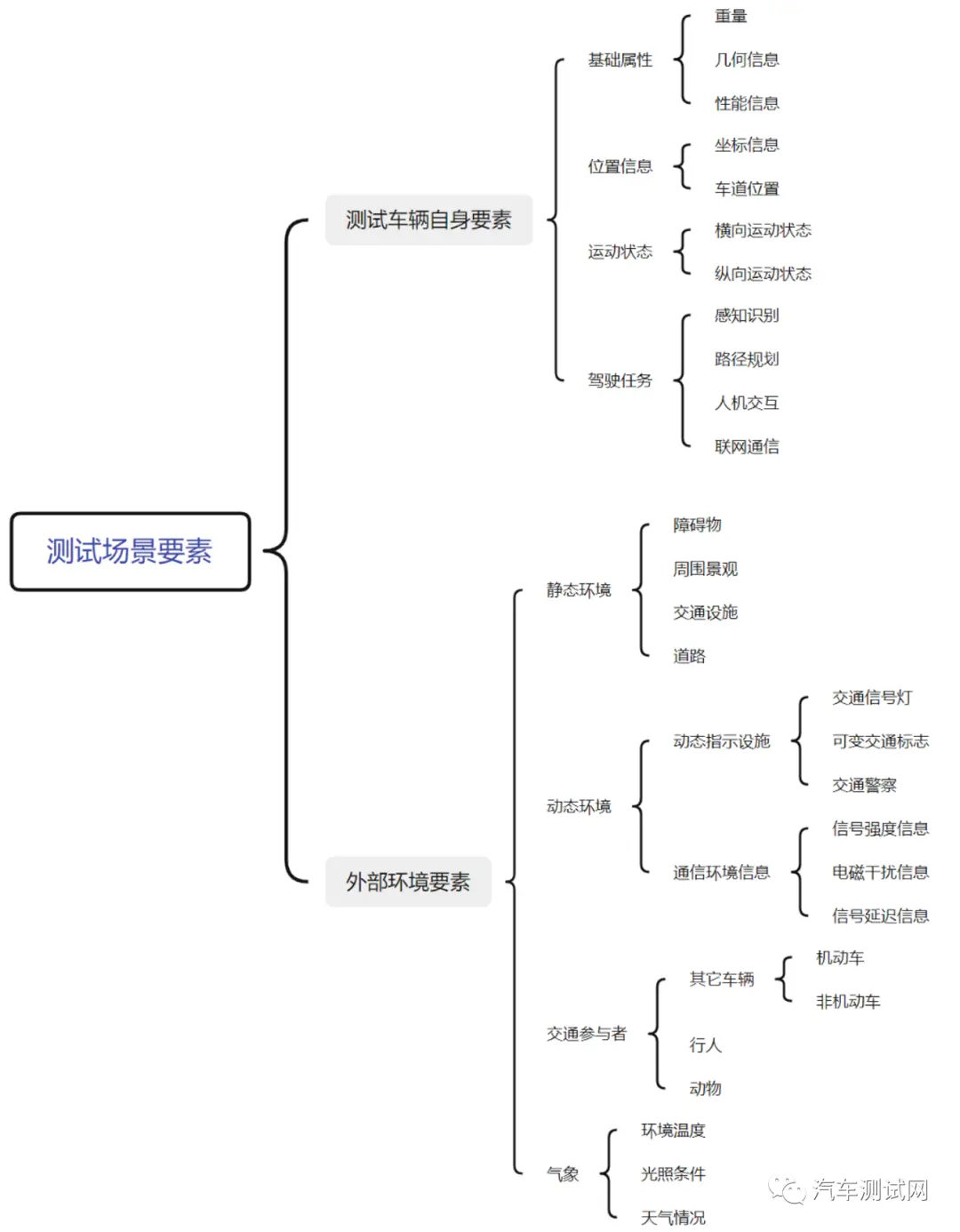
场景是描述主车自动驾驶功能特征与人-车-路-环境-信息之间的复杂时间、空间动态关系的模型,自动驾驶测试场景信息应包括外部场景要素和测试车辆要素2类,外部交通环境要素又涵盖:静态环境要素、动态环境要素、交通参与者要素、气象要素等。同时,应结合被测汽车技术路径及测试目的,对场景组成元素进行分级,当场景元素信息量能够达到基础要求时开展测试。
3、测试场景分类
按照场景的抽象程度可分为:功能场景、逻辑场景、具体场景。自动驾驶系统开发需经历概念阶段、系统开发阶段、测试阶段三个阶段,随着系统开发过程的逐渐深入,测试场景的抽象程度需求不断降低。功能场景用于整体功能验证,逻辑场景用于验证系统的决策逻辑,而具体场景则用于更真实地模拟特定的驾驶情境。

(1)功能场景
功能场景用于概念阶段的项目定义、危险分析和风险评估,强调系统在特定情境下应该执行的基本任务或操作。在测试过程中,需要将功能场景转换为逻辑场景,并转换为可用于相应仿真环境的数据格式。
(2)逻辑场景
逻辑场景更为详细的描述了系统对于不同情境的逻辑判断和决策,定义状态空间内变量的参数范围来表达实体特征和实体间的关系,注于系统如何响应各种可能的输入和环境变化。
(3)具体场景
具体场景通过确定状态空间中每个参数的具体值来明确描述实体和实体间的关系,以状态空间详细描述了测试场景,是对于测试中实际发生的、特定条件下的详细描述,包括精确的地理位置、天气条件、其他道路用户等信息。

4、场景信息提取与挖掘方法
面向自动驾驶测试,有基于已知数据源(真实数据)或基于经验知识(虚拟数据)两种场景构建方法,其基本原理都是提取构建、挖掘、解构与重构,不同方法得到的场景在代表性和应用方向各不相。

(1)自然驾驶场景信息提取方法
由于自然驾驶数据采集由多个传感器配合完成,采集到的数据为多源异构数据,在应用于场景构建之前需要进行数据的融合处理。自然驾驶场景信息提取涉及从真实驾驶数据中提取关键信息,以模拟各种自然驾驶情境。
自然驾驶场景中提取信息的方法和技术如下:
车载传感器数据:利用车辆上安装的各种传感器,如激光雷达、摄像头、雷达等,以获取环境信息。通过处理这些传感器数据,可以提取道路结构、障碍物信息、车辆行为等。
CAN总线数据:分析车辆控制器区域网络(Controller Area Network,CAN)总线数据,以获取关于车辆状态、速度、加速度等信息。
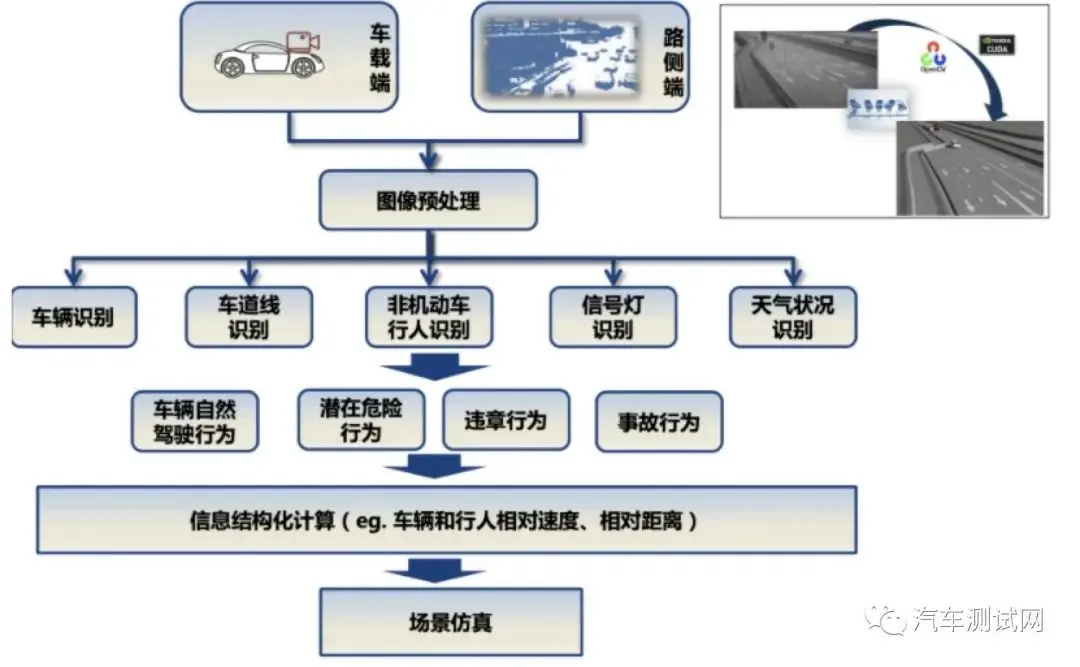
前视摄像头分析:使用计算机视觉技术,如目标检测和图像分割,从前视摄像头的图像中提取道路标志、车辆、行人等信息。
行车记录仪数据:分析行车记录仪中的视频数据,以还原真实驾驶过程并提取关键场景信息。
地图数据分析:利用地图数据,包括道路网络、地形信息等,以获取驾驶场景的地理信息。与车辆实际位置结合使用,有助于理解车辆所处的环境。
车内语音指令:通过语音识别技术,提取驾驶员与车辆的语音交互信息,了解驾驶员的指令和反馈。
驾驶行为分析:分析语音和驾驶员行为数据,以推断驾驶员的情绪状态,了解驾驶过程中的主观体验。
车辆轨迹数据:利用车辆的GPS数据或惯性导航系统数据,分析车辆的轨迹,以获取驾驶路径、速度变化、转向行为等信息。
驾驶员监测系统:使用内置的监测系统,如驾驶员监控摄像头、方向盘传感器等,以提取关于驾驶员姿态、注意力、疲劳等方面的信息。
车辆仪表板数据:分析车辆仪表板上的数据,如车速、油门踏板位置、刹车状态等,以了解驾驶员对车辆的操作和车辆的响应。
(2)事故预碰撞具体场景信息提取方法
事故预碰撞具体场景信息提取是事故发生前5s左右的信息,而这类信息从传统事故深度调查中无法直接获取,需要根据事故现场痕迹特征对事故发生的过程进行再现分析,然后从事故再现结果获取场景构建所需的信息。
以事故预碰撞具体场景信息提取方法如下:
场景分类和定义:将预期的驾驶场景划分为不同的类别,如城市道路、高速公路、交叉口、行人区域等。定义每个类别中可能发生的具体场景,例如突然刹车、交叉路口决策、行人穿越等。
真实世界数据采集:使用传感器装置(雷达、摄像头、激光雷达等)在真实世界中采集各种驾驶场景的数据。考虑不同的道路条件、交通情况、天气条件等,以获取多样性的场景。
模拟环境构建:利用模拟软件创建虚拟环境,模拟各种驾驶场景,包括不同的道路结构、车辆行为、行人行为等。在虚拟环境中可以更容易地控制和修改特定参数,以模拟各种特定情况。
基于人工智能的场景生成:使用人工智能技术,如生成对抗网络(GANs)等,生成具有多样性和复杂性的驾驶场景。这些场景可以涵盖不同的路况、障碍物、交叉口情况等,有助于测试系统对于多样性情境的适应能力。
边缘情况测试:强调系统在边缘情况下的性能,包括极端天气、光照条件差、不寻常的交通行为等。确保系统能够在极端情况下依然有效地感知和应对潜在的碰撞风险。
故障注入:通过在系统中注入故障或干扰信号,模拟传感器故障或通信中断等情况。测试系统在异常情况下是否能够正确地识别并处理潜在的碰撞风险。
人为干扰测试:模拟驾驶员不良行为或突发状况,例如突然变道、迅速减速等。确保系统能够及时检测并做出适当反应,减轻碰撞风险。
综上所述,为了验证自动驾驶汽车的可靠性,不仅需要进行大规模的里程测试,还需要依赖基于场景的仿真测试方法,以更全面地评估自动驾驶系统的性能。这两种方法的结合有助于推动自动驾驶技术的商业化发展。






最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
