




 广告
广告





















































燃料电池系统空压机的防喘振控制

据公开资料显示,国内离心式空压机在燃料电池系统领域的市场份额已超95%。某日系二代燃料电池汽车同样采用电动式离心空气压缩机(下称“空压机”),其空气系统具有快速的空气响应速度(< 1 s),用于满足发电、能量管理和电堆防干等控制需求,如果无法精确控制空压机,则很容易进入空压机喘振区域。稳态工况,通过控制旁通阀流量,将进入喘振区域的空压机工况点右移至非喘振区,此时入堆空气流量不变;瞬态工况,为防止Undershoot或Overshoot导致空压机喘振,通过动态控制空压机“流量-压比”的变化路径和变化速率(Path & Rate Control);通过上述两种方法,可以避免燃料电池用离心式空压机在稳态工况和瞬态工况产生喘振。
空压机喘振及其危害
空压机喘振是指气流沿空压机轴线方向发生的低频率(通常只有几赫兹或十几赫兹)、高振幅(强烈的压强和流量波动)的气流振荡现象。如图1所示,La、Lb、Lc为空压机不同转速线。转速不变,随空压机流量(排出空气的量)逐渐减小,压比逐渐增大,增大到一定程度时,空压机进入喘振区域。
空压机低频率高振幅的气流振荡是一种很大的激振力来源,它会导致空压机部件的强烈机械振动和热端超温。并在很短的时间内造成部件的严重损坏,所以在任何状态下都不允许空压机进入喘振区工作。
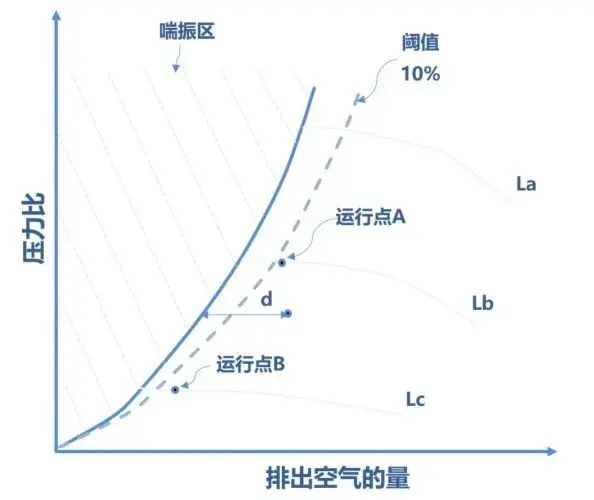
图1 空压机喘振区域示意图
日系M车型空气系统控制器简介
M车型空气路主要有空气滤清器(AC, Air cleaner)、带升速机构的电动空压机(ACP, Air compressor)、中冷器(AIC, Air inter cooler)、进气截止阀(ASV, Air shut valve)、旁通阀(ABV, Air bypass valve)、背压阀(ARV, Air pressure regulation valve)以及相应管路(Pipes)组成。
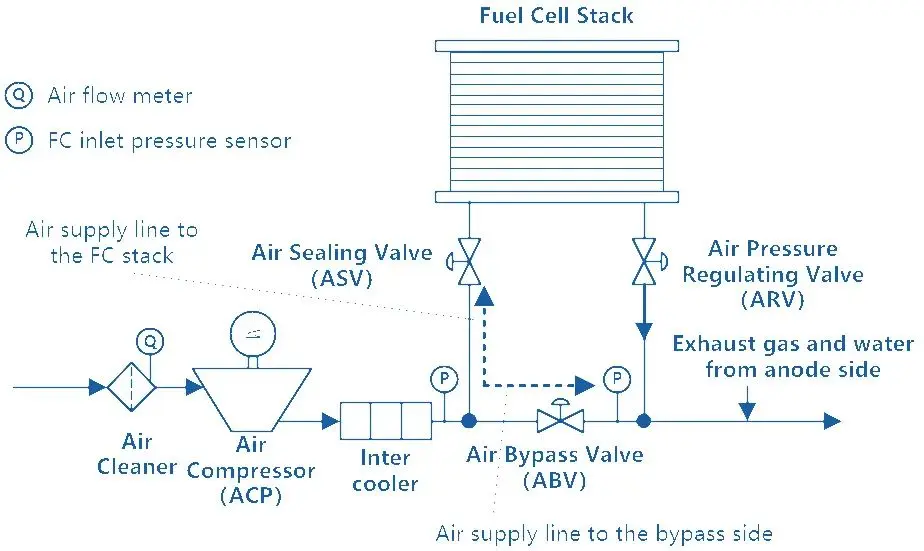
图2 M车型空气路构成
M车型需要高空气路瞬态响应速度(< 1s),用于电堆发电、能量管理和FC防干控制。此外,M车型采用离心式空压机,当其处于瞬态工况时,非常容易进入喘振区域。
为了实现上述控制目标,厂家开发了新型空气供给控制器,通过单独控制3个变量(FC电堆空气流量、FC电堆空气压力和FC电堆空气旁通流量)实现空压机喘振控制。该控制器的设计使用基于模型(Model-based)的开发方法。首先,搭建空气系统空压机、阀门、管路和电堆的物理特性模型并集成到系统级别仿真;其次,通过空气系统部件的逆模型开发前馈和反馈控制。通过上述空气系统控制开发可达成控制目标并防止空压机喘振。
采用Model-based控制方法主要出于以下两个原因:
1)空气系统为非线性(Nonlinear)、多输入多输出(MIMO,Multi-Input-Multi-Output)系统。因此,为实现离心式空压机更为精确的控制,需要进行系统级别高精度在线仿真。
2)Model-based数值仿真平台可作为虚拟测试台,提高开发效率、控制质量,并减少测试时间。
日系M车型如何避免喘振
3.1 稳态工况
如图3所示,空压机控制边界(Upper & Lower Limit)包括:
1)喘振线(Surge Line);
2)阻塞线(或称最小压比线,Choke Line);
3)最大压比线(Maximum Pressure Ratio Line);
4)最大转速线(Maximum Compressor Speed Line)。
通过控制旁通流量,使得空压机流量和入堆流量在不同参考点。当电堆进气流量目标值进入空压机喘振区域,通过增加空压机流量,将参考运行点右移至非喘振区。此时,空压机压比(pressure ratio)不变,电堆进气流量不变。
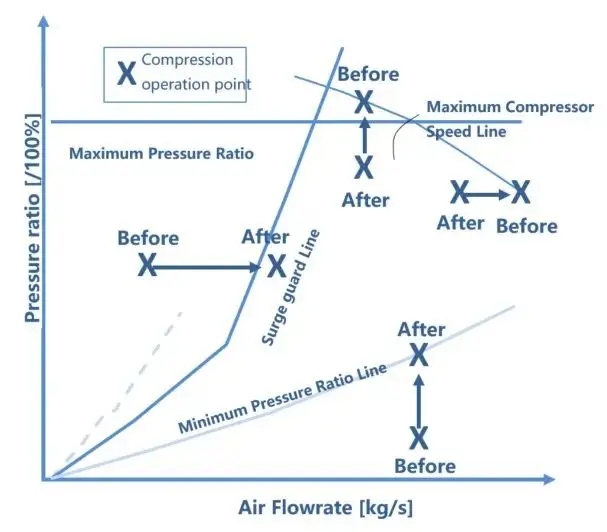
图3 稳态工况喘振控制(Upper & Lower Limit)
3.2 瞬态工况
Path & rate control负责瞬态工况的空压机喘振控制。瞬态工况,空压机转速、ARV开度和ABV开度必须进行精确耦合控制,以防止下冲或过冲(Undershoot/Overshoot)导致空压机喘振。Path & rate control通过定义优化的空压机运行点转移路径和变化速率保证瞬态工况的可控性。如果参考操作点接近喘振区域,控制器修正参考操作点的变化方向以远离喘振区域(Path Control);此外,控制器亦可降低参考运行点的变化速率,使得空压机能够跟踪参考轨迹(Rate Control)。最终,实现防喘振控制。
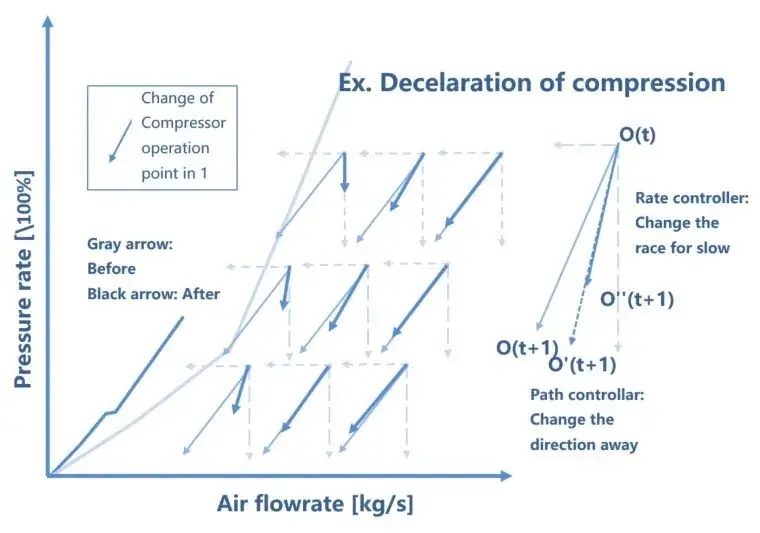
图4 瞬态工况喘振控制(Path & rate control)
空压机被看成燃料电池系统的“肺”,提高其响应速度和控制精度对满足燃料电池水管理、能量管理等方面的需求具有重要作用,由于空压机本身固有特性还需在此过程中避免空压机进入喘振区域,这对空气系统的控制提出了更高的要求。通过工况点右移和路径-速率控制可有效避免空压机喘振。
- 下一篇:国家绿氢装备产业计量测试中心正式授牌
- 上一篇:仿真测试评估:模型置信度的研究新进展







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
