




 广告
广告





















































高级考场 实力“出圈”武汉智能网联汽车测试场——极限ADAS场景测试能力

智能驾驶汽车快速发展以来
汽车的安全功能配置越来越丰富
可以实现的驾驶辅助能力也越来越强从早期的主动安全功能
AEB(自动紧急制动)
BSD(盲区预警)到舒适性功能ACC(自适应巡航)
ALC(拨杆变道)
越来越高级的功能在给驾乘体验感、舒适度
带来大幅提升的同时也为安全功能考核
带来了源源不断的新课题
据统计,目前市场上搭载的常见驾驶辅助(ADAS)功能包括:
| 横向场景 | 车道保持辅助(LKA) |
| 车道偏离预警(LDW) | |
| 车道居中辅助(LCC) | |
| 紧急车道保持(ELK) | |
| 盲区检测预警(BSD) | |
| 自动变道辅助(ALC) | |
| 纵向场景 | 自动紧急制动(AEB) |
| 智能限速辅助(ISA) | |
| 自适应巡航(ACC) | |
| 后端交通穿行预警辅助(RCTA) |
由武汉达安科技有限公司负责运营的武汉智能网联汽车测试场已形成了完备的ADAS测试能力,可以实现对ADAS测试场景的全覆盖。
纵向功能
纵向功能主要负责车辆的车速控制及紧急避险能力。
纵向功能中,AEB作为最危险、最紧急的工况,是对消费者在必要时刻人身及财产安全的重要保障。AEB(Autonomous Emergency Braking 自动紧急制动),作为一种辅助制动的电子系统,它可以帮助驾驶员在紧急状况下最大限度地进行自动紧急制动,从而避免碰撞或减轻碰撞程度。ACC(Adaptive Cruise Control自适应巡航控制系统),作为提升驾驶舒适性并减轻驾驶员驾驶负担的功能,其安全性验证对该功能开发及安全保障具有重要意义。
目前国内外纵向控制相关功能的检测依据主要有:
- GB/T 39901-2021 乘用车自动紧急制动系统(AEBS)性能要求及试验方法
- UN ECE R131 关于就提前紧急制动系统(AEBS)方面批准机动车辆的统一规定
- CNCAP-2021 中国新车评估规程
- ENCAP-2023 欧洲新车评估规程
- IVISTA中国智能汽车指数
- C-ICAP中国智能网联汽车技术规程……
这些标准中,测试难度系数大、场地要求高的场景包含:
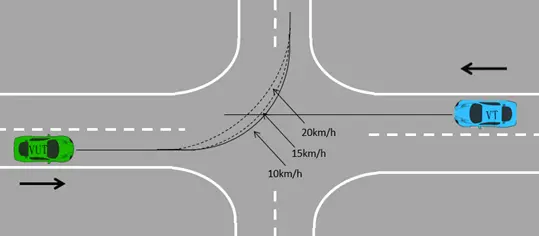
1、CCFTap(Car to Car Front Turn Across Path)此场景中,试验车以不同的稳定速度沿着对应转向路径行驶,目标车以稳定速度直行,两车存在碰撞风险。
2、CCCscp(Car-to-car crossing straight crossing path)
此场景中,试验车和目标车均以稳定速度沿规定路径行驶,两车存在碰撞风险。

3、CCFhos(Car-to-Car Front Head-On)
此场景中,试验车和目标车均以稳定速度沿规定路径行驶,两车存在碰撞风险。
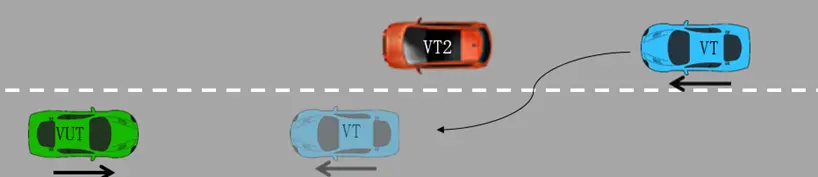
4、CCFhol(Car-to-Car Front Head-On)
此场景中,试验车和目标车均以稳定速度沿规定路径行驶,目标车在距离VT2一定距离时沿规定路径切入试验车前进车道内,两车存在碰撞风险。
5、VRU(Vunerable Road User弱势交通参与者)
此场景中,包括目标行人、目标自行车、目标两轮车等弱势交通参与者的远/近端横穿及沿路运动的子场景。
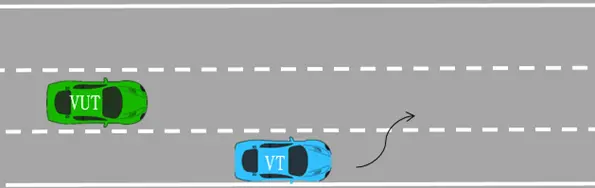
6、前方车辆切入
ACC舒适驾驶模式下,相邻车道低速车辆切入至测试车辆前方。该场景测试车辆最高测试车速可达120km/h,目标车辆车速最高可达110km/h。
横向功能
横向功能主要将车辆在直道和弯道下保持在车道内,或控制车辆居中行驶,有效避免因车辆偏出车道产生的碰撞危险。同时,车道居中行驶控制可有效缓解驾驶员控制的疲劳度,增加驾驶舒适性。
目前国内外横向控制相关功能的检测依据主要有:
- GB/T 39323-2021 乘用车车道保持辅助(LKA)系统性能要求及试验方法
- UN ECE R130 关于车道偏离警示系统(LDWS)认证的统一规定
- GBT33577-2017智能运输系统 车辆前向碰撞预警系统 性能要求和测试规程
- UN ECE R79 关于就转向装置方面批准车辆的统一规定
- CNCAP-2021 中国新车评估规程
- ENCAP-2023 欧洲新车评估规程……
其中,测试难度系数大、场地要求高的横向主要场景包含:
1、 ELK道路边缘偏离测试
此场景中,试验车以72km/h的稳定车速沿道路行驶,期间以0.2~0.6m/s的不同横向偏离速度向道路边界偏离,存在安全风险。
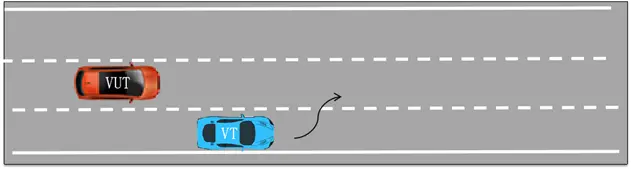
2、 ELK车对车切入测试
此场景中,试验车以72km/h的稳定车速,目标车以72km/h的稳定车速分别沿道路行驶,期间以试验车以0.2~0.6m/s的不同横向偏离速度向相邻车道偏离,两车存在碰撞风险。

3、 UN ECE R79 B1型ACSF测试
此场景中,将依据整车厂申报的最大横向加速度来选择弯道和测试速度开展测试,试验车最大测试速度可达130km/h,验证试验车的极限过弯能力。

场地条件:
-
干燥、均匀、固体铺装、纵坡小于1%,最小峰值制动力系数0.9;
-
测试路径横向距离两侧5m范围且测试结束点前方20m道路必须铺装且无导致传感器异常的不规则物体;
-
测试道路车道线及标识标线满足标准要求且不能影响ADAS功能标线。
环境条件:
-
天气干燥,没有降水,降雪等情况;
-
水平方向上的能见度不低于 1km;
-
风速不大于10m/s;
-
对于在自然光条件下进行的试验,整个试验区域内的照明情况一致、光照强度不低于2000Lux;
-
除由于试验设备所造成的影响,在整个区域内不应有明显的阴影区域;
-
试验不在朝向或背离阳光直射的方向上进行。
需30min记录一次参数,包括环境温度、道路温度、风速和方向、照度。测试设备应满足动态数据的采样及储存,采样和存储的频率至少为 100Hz。试验车及目标车之间使用DGPS时间进行数据同步。
采集精度要求:-
速度精度0.1km/h
-
横纵向位置精度0.03m
-
航向角精度1°
-
横摆角速度精度0.1°/s
-
纵向加速度精度0.1m/s²
-
方向盘角速度1°/s
武汉智能网联汽车测试场
依托于武汉智能网联汽车测试场高速及极限性能测试区和专业的测试设备,武汉智能网联汽车测试场已形成了完备的ADAS测试能力,可以实现对ADAS测试场景的全覆盖。
在开展测试时,可利用整车驾驶机器人、软目标假车、运动装载平台实现测试车辆、目标车辆、弱势交通参与者的多目标精准协同控制,可以实现双方行进过程中车速均控制在±1.0km/h,侧向偏离量控制在±0.1m,横摆角速度±1.0°/s,方向盘转角速度15.0°/s,可以精准实现场景搭建,开展对应测试。
高速及极限性能测试区场地总占地面积超过12万平方米,总长约1750米,包含R150、R250、R500弯道,满足横纵向ADAS功能的基础及极限场景的全部功能测试。
作为测试场运营方,武汉达安科技有限公司将以武汉智能网联汽车测试场为重要测试场地平台,开展智能网联汽车整车功能测试、整车功能评价、整车功能评估分析、整车可靠性测试、系统部件性能测试、系统部件物理特性车规性能测试、V2X测试、信息安全测试等,为客户提供从整车到系统部件级的全方位测试技术服务。







最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
