




 广告
广告





















































智能网联汽车辅助驾驶前向视觉感知性能要求测试报告

近日,国家智能网联汽车创新中心针对智能网联汽车传感器感知能力,组织行业伙伴,牵头申报传感器测试团体标准,经由学会审批后面向行业发布,并依据标准开展传感器测试验证工作。本文以某款智能传感器的测试结果为例,整理发布《智能网联汽车辅助驾驶前向视觉感知性能要求测试报告》,系统全面阐述了传感器感知能力性能评价及验收方法。
1.传感器测评背景与意义
随着智能网联汽车技术的快速迭代,对车载智能摄像头的性能提出了更高的要求。现有汽车制造商和Tier1之间缺乏描述评价智能摄像头等传感器的通用标准,模组供应商和算法供应商缺乏一致的测评体系。因此,亟需开展相关测评体系的探索,建立一套较为完善的车载智能摄像头性能主客观测评体系,促进产业健康发展。
2.视觉感知系统测评主要内容
本次测试使用了速腾聚创Reference真值系统和智行众维iTT测试系统,基于《智能网联汽车辅助驾驶前向视觉感知性能要求及测评方法 第2部分:自适应巡航控制系统》,对待测某品牌视觉感知系统X进行了性能测试。本次测试的主要测试指标为检测结果的位置、速度以及航向角。测试过程由测试车辆和目标车辆共同完成,测试车辆搭载了某品牌视觉感知系统、Reference真值系统及iTT设备,目标车辆搭载iTT设备以获取两车之间的相对运动和位置信息。3.视觉感知系统测评验证
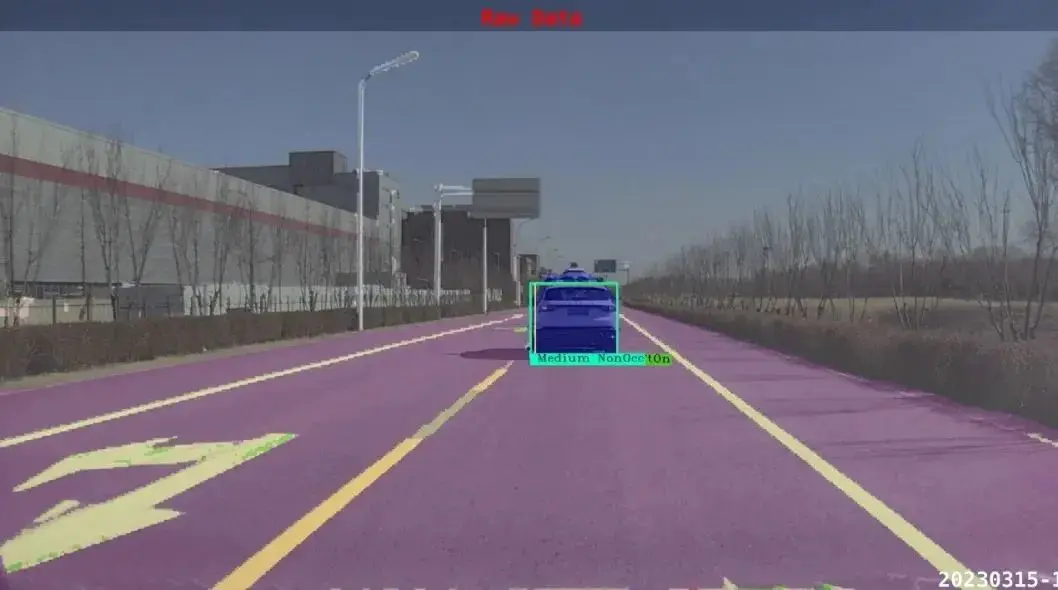
测试场景包含目标探测距离检测、前车切入和前车切出三个场景。测试过程中在实际道路上连续驾驶,并在行驶过程中进行多场景变换,最后计算整个测试过程的各项测试指标。

目标探测距离测试场景
前车切出测试场景
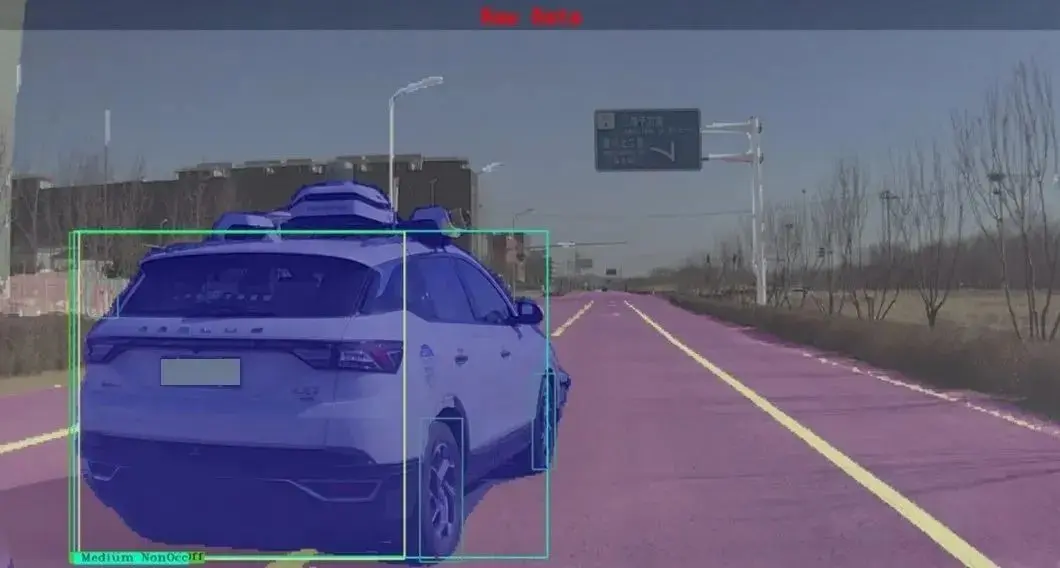
前车切入测试场景
如下图所示,被测某品牌感知系统的检测结果与真值系统、iTT设备在纵向距离的检测结果曲线均拟合较好,但被测系统在50m后误差开始增大,且目标检测距离误差随着两车之间距离的增大也同时增大。经实地测量,在被测系统最远探测距离声明值150m处,误差为15.4m,误差比为10.3%。横向距离检测方面,被测某品牌感知系统的检测结果与真值系统、iTT设备在横向距离检测时变化趋势基本一致。在被测系统最远探测距离声明值150m处,误差为0.9m,误差比为0.6%。
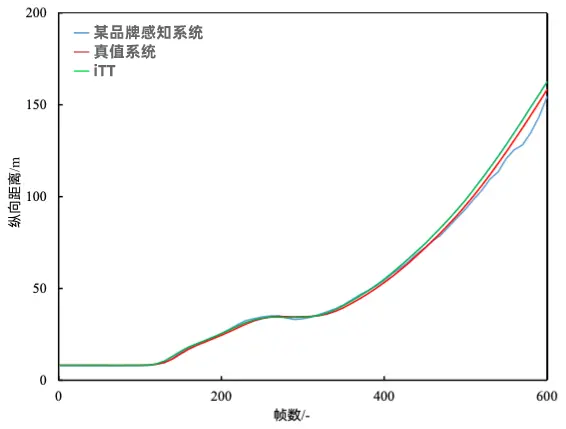
纵向距离对比图
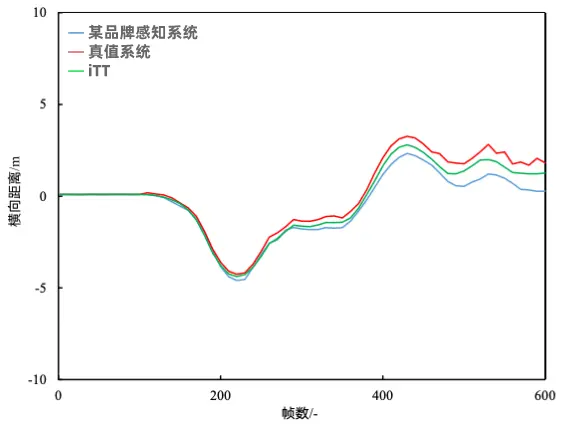
横向距离对比图
被测某品牌感知系统与真值系统、iTT设备的速度检测对比与航向角检测对比如下图所示,在行驶过程中,三条曲线的变化趋势均较为一致。
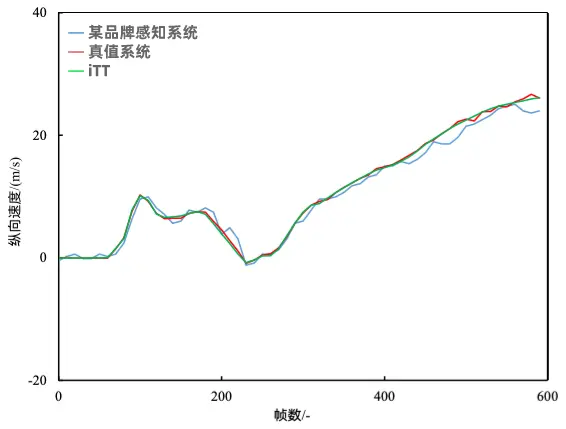
纵向速度对比图
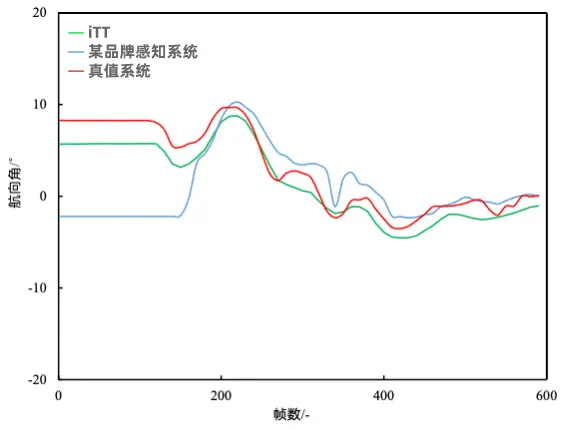
航向角对比图
4.下一步测试计划
对于行业而言,智能传感器其性能、可靠性表现仍待验证,且仍未形成统一的测评标准。解决方案商、Tier1、主机厂等各方在进行智能传感器感知相关功能开发时,均需耗时耗力对感知解决方案的性能进行实测。目前各国对于自动驾驶技术出台的相关法律法规与标准更多聚焦在功能层面的要求和指标,缺少针对传感器的感知测评规范。目前国家智能网联汽车创新中心联合全行业开展的感知传感器性能测评工作已启动,后续将建立感知传感器白名单,支撑行业用户选型,减少下游厂商重复测评,提升行业协同创新效率,加速智能网联关键部件产业化落地。创新中心将持续关注智能网联感知传感器领域技术动态及发展趋势,并开展相关专项研究,并诚邀传感器厂商、车企、汽车科技公司、研究机构、高校等积极参与传感器测评体系建设中来。







最新资讯
-
国内现货!GRAS 46AE/146AE 限时优惠直降 5
2025-04-22 16:22
-
仿真测试必要性及标准法规
2025-04-22 16:22
-
福特退出中国,进入倒计时!
2025-04-22 16:21
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
