




 广告
广告





















































浅谈电动汽车驱动系统动力学模型搭建方法

当前化石燃料随着全球经济及科技的过度需求出现短缺的现象,发展新能源汽车已经成为各国应对燃油危机的必要途径。而轮毂电机体积小,可控自由度高等优势成为新的新能源汽车驱动系统发展方向。本文以后轴轮毂电机驱动电动汽车为例,以提高车辆在转向过程中驾驶稳定性以及动力性为目标,搭建电动汽车驱动系统动力学模型。

1、轮毂电机电动汽车发展现状
随着科技的发展以及空气污染压力的剧增,新能源汽车进入高速发展的时代,纯电动汽车是当前发展最为迅速的新能源车型,基于轮毂电机分布式驱动电动汽车由于更高的控制自由度高重新进入了高速发展的阶段。
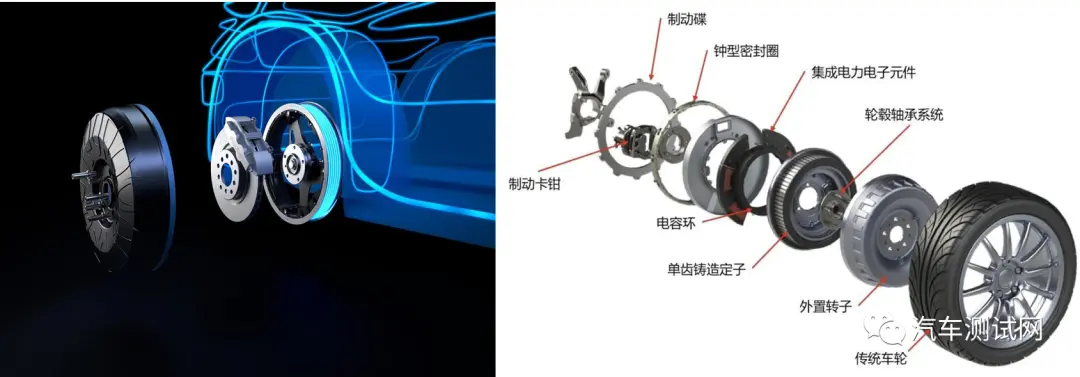
汽车轮毂电机
轮毂电机将传动装置和制动装置都集中在车轮上,省略了传统汽车的差速器等传动部件,具有体积小,可控自由度较高,易于布置等优势成为新的纯电动汽车驱动系统发展方向。
1898年,Lohner Porsche就已经将轮毂电机安装在汽车上,使用74节80V铅酸蓄电池直接供电,该车型限定乘坐两人,由前轮安装的轮毂电机驱动。在改进版本中,使用两个汽油发电机为车辆的行驶能量源,并且由前轮驱动改进为四轮毂电机驱动。
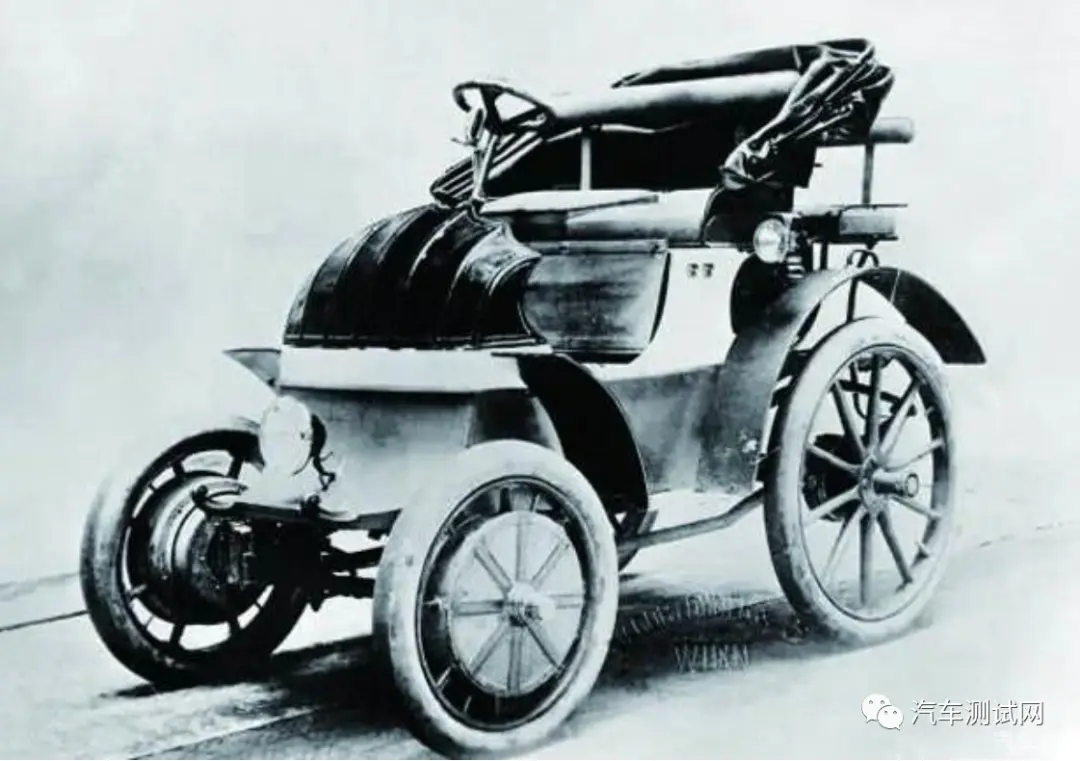
前轮驱动轮毂电机汽车
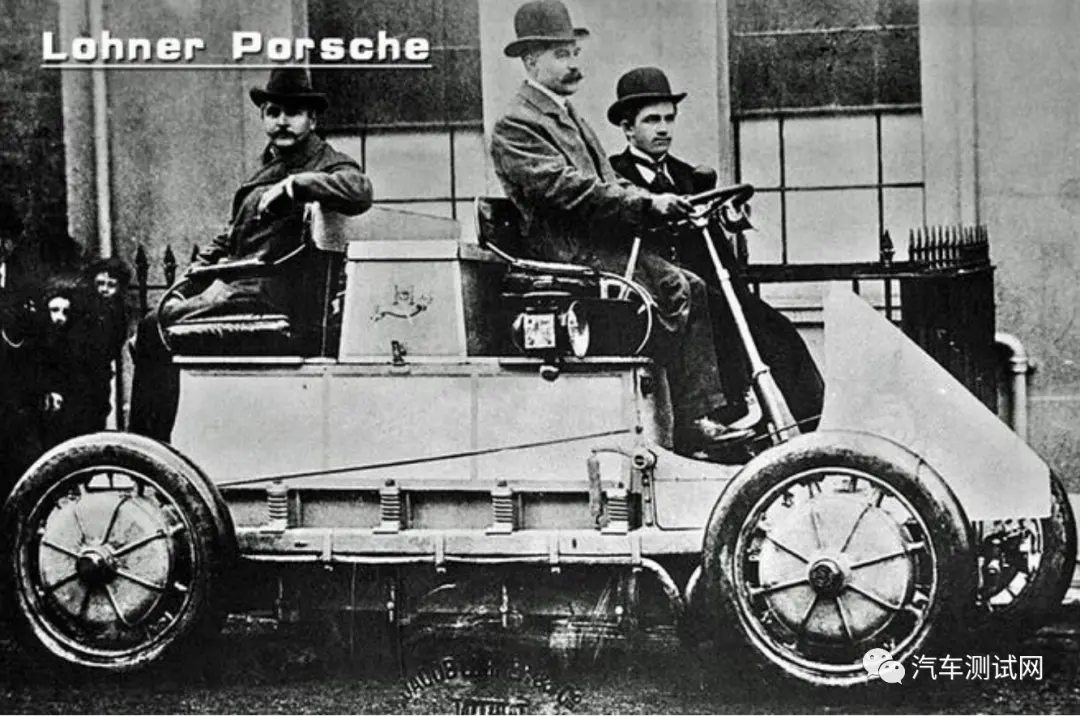
四轮驱动轮毂电机汽车
2011年,清水浩教授创立SIM Drive公司并设计了Eliica汽车,采用8个60kW的轮毂电机进行驱动,最高时速可达370km/h。
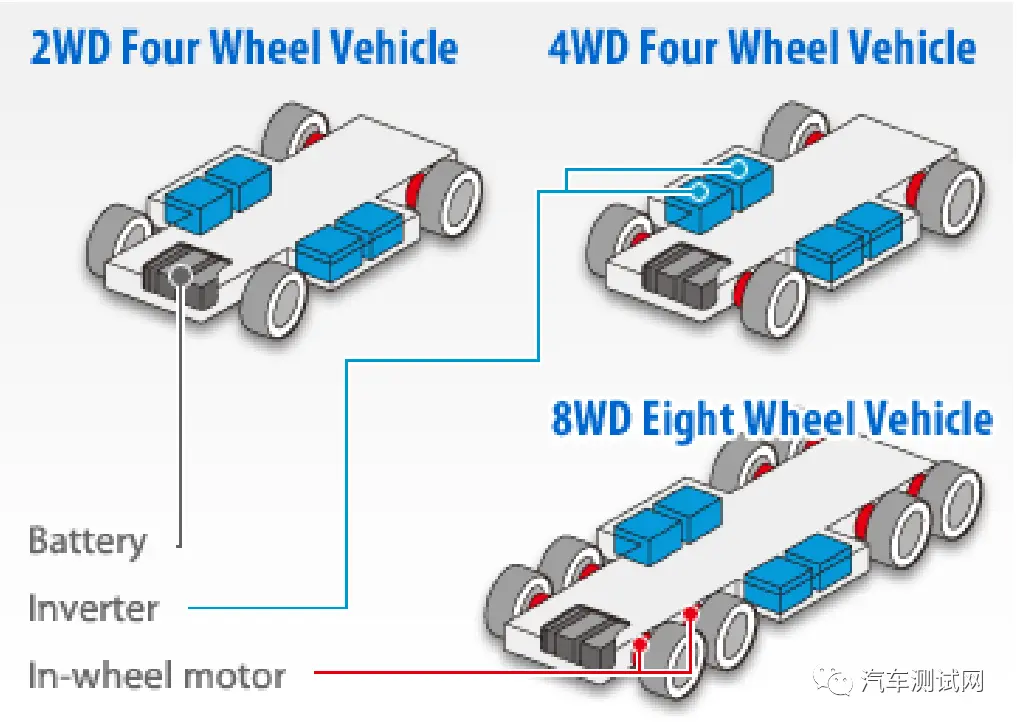
SIM-Drive 公司电动汽车构型
2011年,BYD推出了旗下首款搭载轮毂电机的纯电动大巴,其后驱动桥搭载了配合减速机构的轮毂电机系统,单个电机最大功率为90kW,采用液冷的方式进行冷却。

BYD轮毂电机大巴
2、汽车驱动系统动力学模型搭建
汽车驱动系统动力学模型搭建需要有足够精确反映车辆在运行过程中的状态的物理模型,包括:整车驱动系统模型、轮毂电机增加的非悬挂质量引起的载荷偏移、轮毂电机模型、车辆转向系统模型、轮胎模型以及路面模型等。
(1)整车驱动系统模型架构
以后轮双驱动轮毂电机的样车为例,整车动力源为安装在车辆底部的高压蓄电池,通过安装在后轮的两个轮毂电机提供车辆行驶驱动轮力。整车驱动系统的控制系统主要由整车控制器、轮毂电机控制器(MCU)以及电池管理系统(BMS)组成。
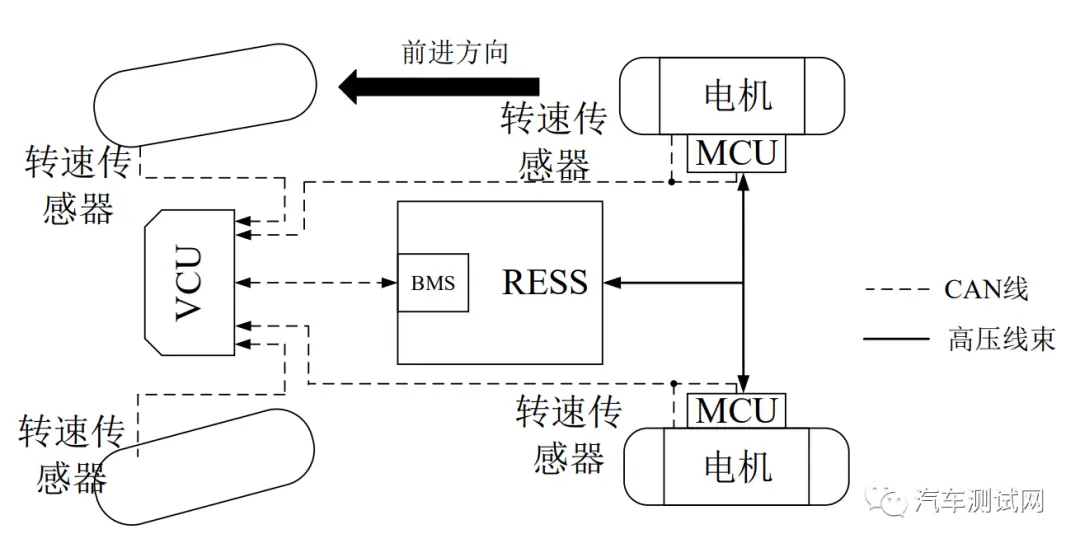
后轮双电机驱动电动汽车整体模型架构
来源《纯电动汽车驱动电机控制系统建模及控制策略研究》
(2)驱动轮载荷计算
车辆转向行驶的过程中,左右驱动轮会产生垂直载荷差,外侧车轮载荷增加内侧车轮载荷减小,即发生载荷偏移,并且转向角越大且车速越快时,这种现象就越明显。在驱动轮所在路面相同的假设下,载荷越大可以分配更多的驱动转矩,因此在转矩分配计算时需要确认在转向过程中每个驱动轮的垂直载荷,并且根据垂直载荷对转矩进行分配。
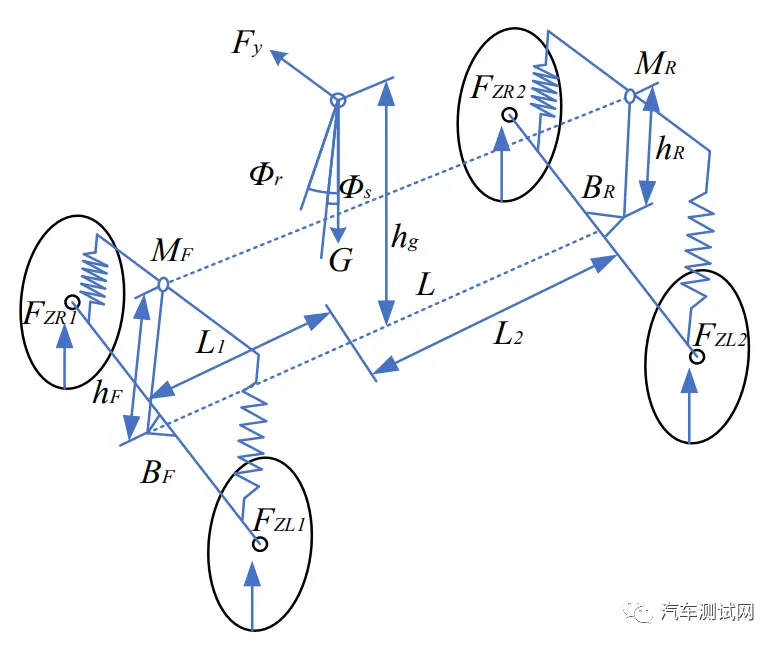
汽车驱动轮载荷分解
来源《纯电动汽车驱动电机控制系统建模及控制策略研究》
驱动轮地面法向载荷与汽车的质量参数、车身形状、行驶状态以及道路的坡度角及特性都有关系,建立汽车驱动系统动力学模型需要进行后轴驱动轮载荷的计算。
(3)轮毂电机建模
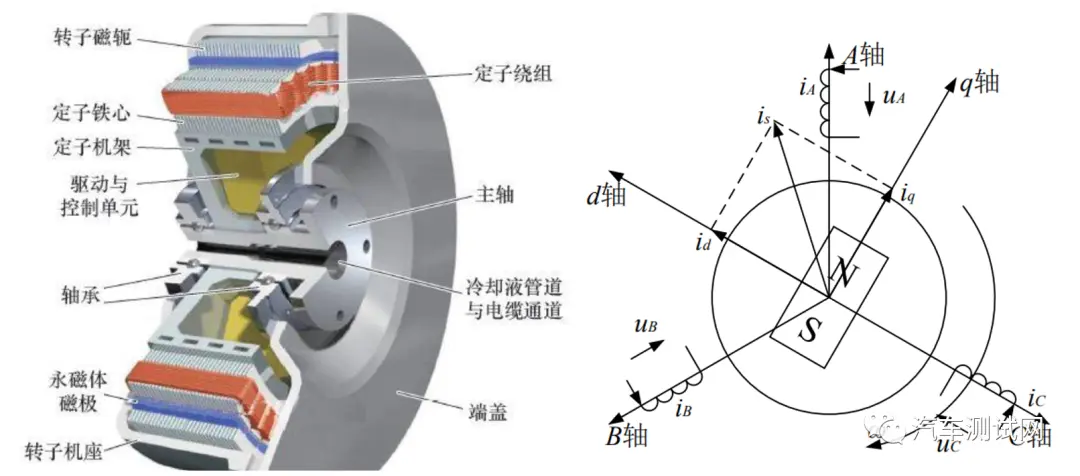
在整车驱动系统过程中,驱动电机作为最终的转矩输出执行部分,同样需要有精确的数学模型。在轮毂电机的类型选型中,基本都采用永磁同步电机的型式。永磁同步电机(PMSM)具有能量密度高,体积小,转动惯量小、脉动转矩小、控制精度高等优点。
轮毂电机建模方法如下:
机械建模:轮毂电机的机械部分可以通过建立动力学模型来描述,包括转动部分的质量、转动惯量、摩擦等参数。
电气建模:描述轮毂电机的电气部分,考虑电动机的电感、电阻、电流等参数,涉及到建立电路方程或者使用电气等效模型。
磁学建模:对于直驱发电机,磁学模型也是必要的,包括电机的磁通、磁阻、电磁力建模等。
(4)转向系统建模
转向模型是为了解决汽车转向时内外转向轮指向圆心不同的几何学,使车轮的轴线交于转向中心,避免在转向过程中造成轮胎的过度磨损。德国工程师Lankensperger提出Ackmann转向模型,根据方向盘的转向角δT,方向盘转向角的传动比iδ计算得出车辆的转向半径R。

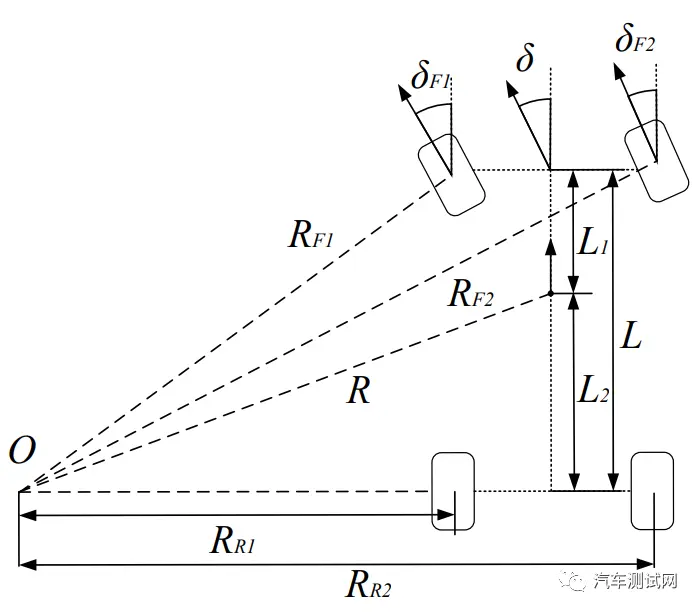
Ackmann 转向几何模型
来源《纯电动汽车驱动电机控制系统建模及控制策略研究》
L为轴距,L1为质心到前轴的距离,L2为质心到后轴的距离,R为转向半径,δ为车辆的转向角。
(5)轮胎建模
轮胎是连接车辆与路面的唯一介质,车辆的起步加速转向都需要依靠轮胎与地面之间的相互作用才能实现,对驱动系统的控制最终也是落实到轮胎与地面之间,精确的轮胎模型是整车转矩计算策略重要的基础。
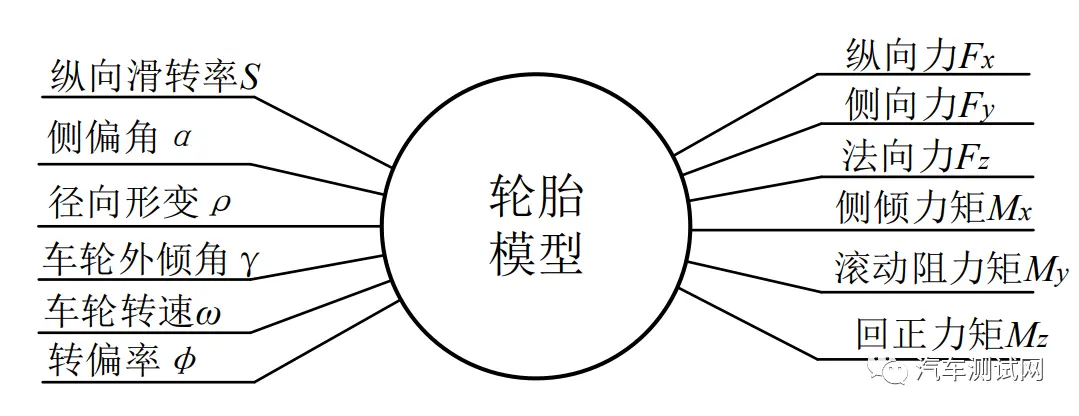
轮胎模型分解示意图
来源《纯电动汽车驱动电机控制系统建模及控制策略研究》
轮胎模型通常为轮胎六分力与车辆运动状态之间的联系,在车辆运行的过程当中,输入车辆运行的轮胎参数及物理特征参数,通过模型输出需求的作用力或者作用力矩的值,
半经验半物理模型建模:根据试验经验公式或半理论半经验公式得出的拟合模型,建立在大量的台架及整车测试的基础之上,对测试结果进行回归分析,将轮胎的物理特性过通过大量测试点进行拟合公式表达。
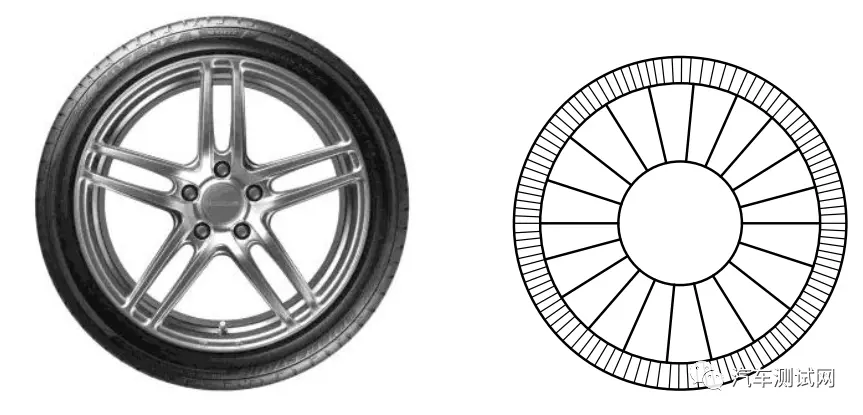
理论(物理)模型建模:根据车轮的物理形状以及受力形变等数学关系进行描述,用来预测力或者力矩的变化,比较有代表性的为刷子模型以及Gim模型等。
(6)路面建模
路面作为驱动轮驱动力直接作用对象,驱动轮所处路面的特性对转矩分配性 能影响最大,在算法搭建以及验证阶段需要精准对象特征路面的数学模型。路面数学模型主要有Pacejka模型、Burckhardt模型、以及Kiencke模型等。
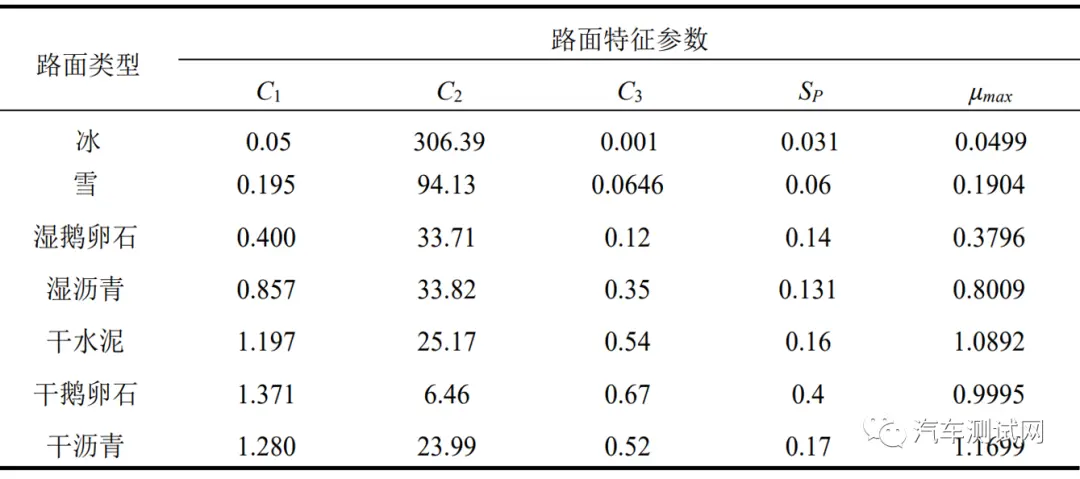
其中Burckhardt路面模型作为一种建立在大量测试数据基础之上的拟合数学模型,具有结构简单、计算量小、拟合度高等优点,非常适合代入计算机仿真计算。
Burckhardt模型由M.Burckhardt、Fahrwerktechnik 等学于1993年提出,可以较为准确的描述出驱动轮的μ-S曲线,能准确的描述不同类型路面的车轮滑转率S和非线性纵向附着特性μ之间的数学关系。式中C1、C2、C3为与路面特征相关的拟合方程的特征值。

3、电动汽车驱动系统动力学模型搭建展望
(1)高度集成化
将更强调对整个电动汽车系统的高度集成化建模,考虑电机、电池、传动系统以及车辆控制系统之间的更加紧密的耦合,有助于更准确地预测电动汽车在不同工况下的性能和响应。
(2)多物理场耦合
将更加强调多物理场的耦合,包括机械、电气、热力学等方面的相互影响。考虑电池的热效应、电机的温度变化等因素,以更全面地理解系统动力学行为。
(3)深度学习应用
随着深度学习技术的发展,可能会采用深度学习方法来学习复杂的汽车系统动力学行为,有望提高模型的准确性和泛化能力,尤其是在面对复杂、非线性的系统时。
(4)环境影响建模
将更加关注电动汽车对环境的影响,包括对能源系统、道路基础设施和交通流的影响,以支持可持续和综合性的交通规划。
未来电动汽车的发展,需求更全面、高效、智能的电动汽车驱动系统动力学模型,以推动电动汽车技术的发展并应对未来交通和环境挑战。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
