




 广告
广告





















































越野车沙漠工况台架复现的可行性分析

《北京汽车》2023年第5期
关永康,方普锋等
摘 要:对越野车沙漠场景行驶工况进行分析,将典型的沙漠穿越和玩沙工况重新组合,构建一个比较合理的考核双模越野车热管理与保电性能的综合工况。通过进一步分析四驱转鼓台架与四电机能量流台架的控制模式发现,将沙漠越野行驶工况数据进行相应转换后输入台架可实现工况复现测试;将台架测试结果与实车数据进行对比后发现,台架测试的等效程度满足预期,说明在台架上复现复杂的沙漠越野行驶工况完全可行。
关键词:越野车;沙漠工况;四驱转鼓台架;四电机能量流台架
0 引 言
沙漠全地形越野过程中,坡度随穿越沙山不同而快速动态变化,并且沙子软硬程度不同会导致轮胎与路面的附着条件非常复杂。在沙漠越野时,由于陷沙、刨沙、推沙等情况导致车辆行驶阻力变大,轮端功率增加,这对车辆动力性提出很高要求;同时叠加强光照、高环境温度、高地表温度等因素,对双模越野车的热管理与保电性能提出严苛要求。
由于沙漠越野工况的标定、匹配、验收等测试只能在现场完成,这会带来试验周期长、人员及车辆安全风险高、试验经费高等问题。将越野车沙漠工况试验转化为常规台架试验显得尤为重要,但将复杂的沙漠越野场景进行台架复现难度较大,本文验证了采用常用的转鼓台架和四电机台架复现沙漠工况的可行性,使越野车可以在开发阶段不受地域与环境影响开展沙漠工况测试,提前识别产品风险点,进而缩短开发周期。
1 沙漠工况
内蒙古阿拉善腾格里沙漠和巴丹吉林沙漠具有多条典型的沙漠穿越行驶路线,通过采集其中的穿越与玩沙工况,设计双模越野车沙漠综合工况,以考核双模越野车的热管理与保电性能。
图1 为沙漠综合工况,包括4 个典型越野行车场景(沙漠穿越、小V 沟刷锅、大V 沟直拔冲坡、书记锅往返冲坡) 和3 个沙地模式怠速发电场景,模拟越野玩家进行沙漠全地形越野。
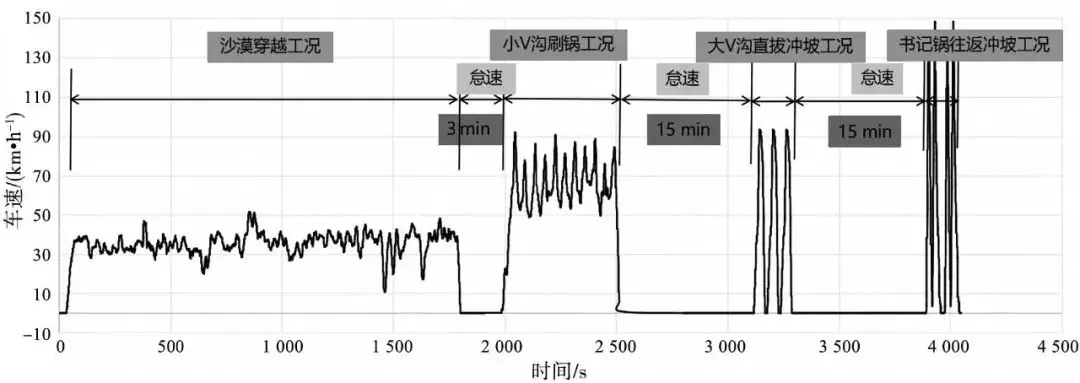
图1 沙漠综合工况
本次台架模拟主要为考核车辆保电及热管理性能,保电和热管理性能的主要影响指标为平均车速和平均轮端功率,最大轮端工况作为参考项。基于前期经验,当台架实车对比平均车速误差≤3%、平均轮端功率≤5%时即认为台架复现有效。
2 四驱转鼓台架试验
2.1 台架控制模式
通过四驱转鼓台架可以进行整车性能检测。转鼓台架利用加载装置模拟铺装路面(水泥或沥青) 的车辆行驶阻力,其主要控制模式有3 个[1]:(1) 恒转速模式,转鼓台架在转速闭环控制下运转,转速方向不变,负载大小和方向取决于测功机,该控制模式主要用于汽车驱动力的测试;(2) 恒转矩模式,转鼓台架在转矩闭环控制下运转,转矩方向不变,转速大小取决于测功机,该控制模式主要用于汽车自动道路负载试验;(3) 惯量模拟模式:模拟铺装路面行驶,按照车辆滑行阻力方程式(1) 进行阻力加载,其中需要为台架输入道路模拟谱,即车速V 和X 轴倾角α。
F滑行阻力=A+BV+CV 2 (1)
式中:F滑行阻力为车辆滑行阻力;A 为滚动阻力系数;B 为传动阻力一次项系数;C 为空气阻力二次项系数;V为车速。
2.2 台架参数
为使转鼓台架适于模拟沙漠越野行驶工况,台架控制模式选取惯量模拟模式。为考核车辆电量平衡和热管理性能,台架加载车速应和道路实测车速一致,并通过调整台架加载F滑行阻力和X 轴倾角确保车辆平均轮端功率与实测一致。
测量车辆滑行阻力的方法主要有道路滑行法和等速下扭矩测量法两种,目前较多采用道路滑行法[2]。汽车在铺装水平路面的滑行阻力主要包括轮胎阻力、传动系阻力和空气阻力,式(1) 中阻力系数A、B、C值确定后可以计算任意车速下滑行阻力值。
图2 为双模越野车型在阿拉善沙漠天鹅湖和铺装公路实测的滑行阻力曲线对比,前者滑行阻力曲线为y=3588+11x+0.12x2,后者滑行阻力曲线为y=304+1.81x+0.12x2,其中x 为车速,y 为滑行阻力,可以看出,沙漠工况的滚动阻力系数A 和传动阻力一次项系数B 均大于公路铺装路面,空气阻力二次项系数二者相同。沙漠不属于铺装路面,其车辆滑行阻力影响因素多,包括沙子深浅、湿度、软硬、车辆胎压、车重等,各种因素综合作用,图2 中滑行阻力曲线仅表示阿拉善沙漠天鹅湖的特点,不代表其他沙漠工况,因此台架模拟选用图2 中沙漠工况滑行阻力会存在一定误差。
台架控制模式仅可以加载固定滑行阻力,参考图2 中曲线进行加载,并通过修正X 轴倾角α 实现轮端驱动力等效以弥补上述误差。
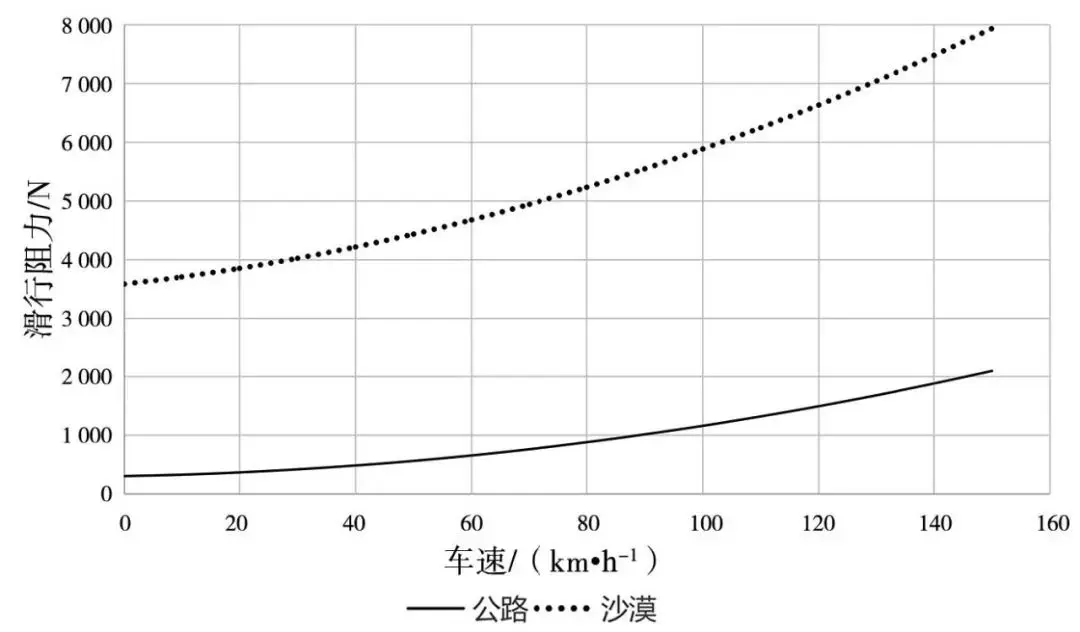
图2 不同路面的滑行阻力曲线
台架加载X 轴倾角α 可通过式(2) 汽车动力学公式 [3] 计算得到
Ft=F滑行阻力+Fi+Fj (2)
式中:Ft为车辆驱动力;F滑行阻力可由式(1) 计算得到;Fi为坡度阻力;Fj为加速阻力。
坡度阻力Fi为
Fi=mg·sinα (3)
式中:m为双模越野车质量,取值3 550 kg;g 为重力加速度,取值9.8 m/s2;α 为X轴倾角。
加速阻力Fj 为
Fj = ma (4)
式中:a为车辆加速度,通过车速对时间求导计算得到。
通过式(2)、(3) 仿真计算得到修正后台架加载X轴倾角α。
以小V 沟刷锅工况为例,得到实车测试与台架加载的路谱曲线,如图3、4 所示。
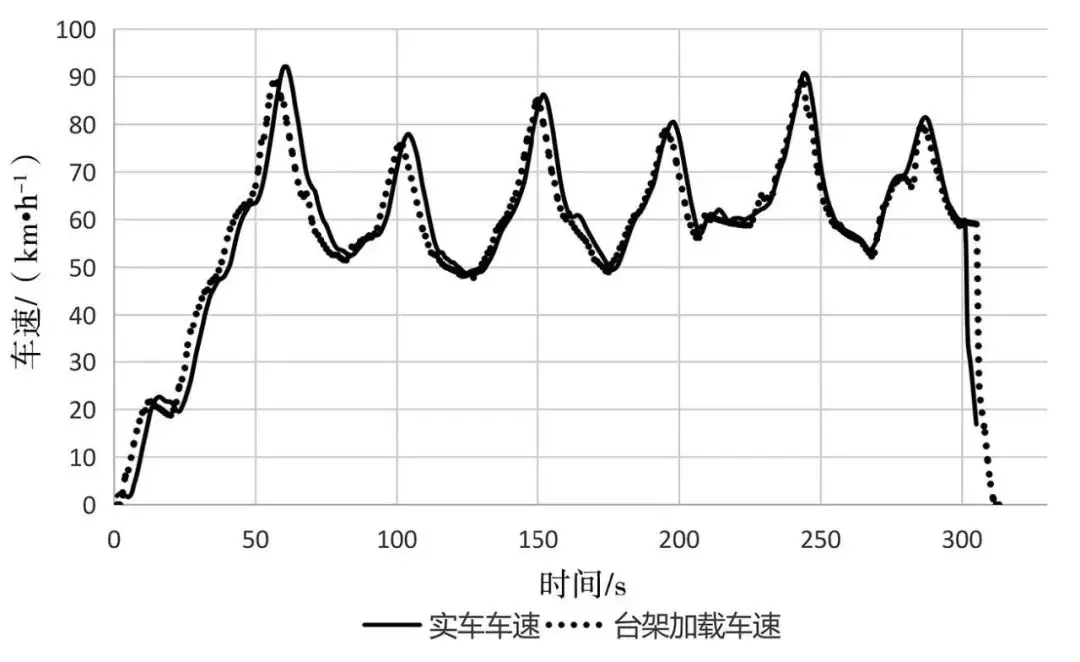
图3 实车车速及台架加载车速
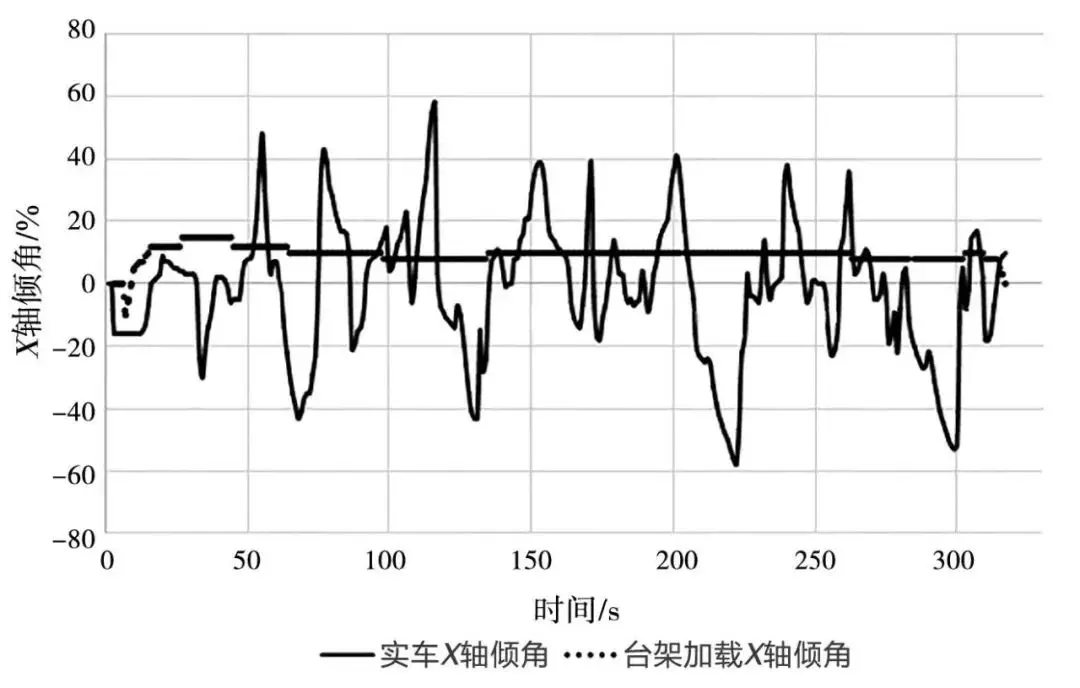
图4 实车X 轴倾角及台架加载X 轴倾角
2.3 实车对比
采用双模越野车沙漠滑行阻力曲线、车速和X轴倾角曲线进行四驱转鼓台架试验,并对比实车试验,结果如图5、6 所示。图5 中台架测试车速基本跟随实车车速,平均车速偏差为3%,符合试验预期;图6 中台架的轮端功率基本跟随实车测试结果,轮端平均功率的台架测试值为147 kW,与实车测试值144 kW基本一致,符合预期,但最大轮端功率台架测试值为350 kW,与实车测试值450 kW差异较大。台架测试可用于开发与验证越野车型的沙漠越野热管理性能和电平衡能力,但无法复现车轮瞬态打滑导致的轮端功率突升工况。
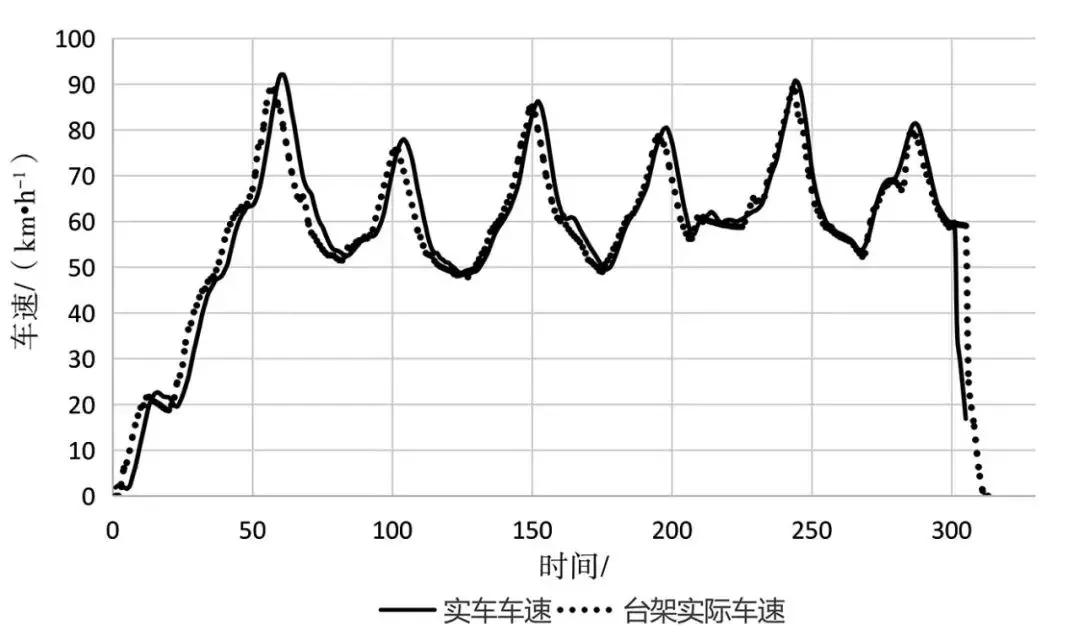
图5 实车与台架测试车速对比
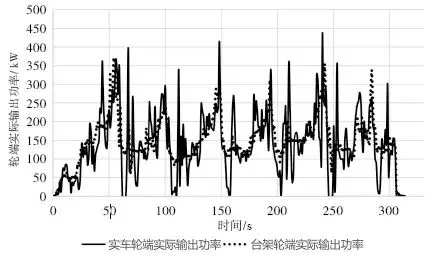
图6 实车与台架测试轮端功率对比
3 四电机能量流台架试验
3.1 台架控制模式
四电机能量流台架通过拆除车轮并使用工装与传动轴连接,即将台架的4 个电机作为车轮,通过加载装置为转鼓施加负载模拟车辆在铺装道路的行驶阻力,其主要控制模式有3 个:(1) 加速踏板速度模式,加速踏板控制驱动电机,速度控制负载电机;(2) 扭矩速度模式,扭矩控制驱动电机,速度控制负载电机;(3) 惯量模拟模式,按照车辆滑行阻力方程式(1) 进行力加载,其中需要为台架输入道路模拟谱,即车速V和X轴倾角α。
3.2 台架参数
台架测试采用加速踏板速度模式,通过控制车速和加速踏板深度实现沙漠越野工况复现。台架加载车速与实车测试车速保持一致,台架加载加速踏板深度可通过车辆加速踏板MAP 表得到,双模越野车沙地模式加速踏板MAP如图7 所示。
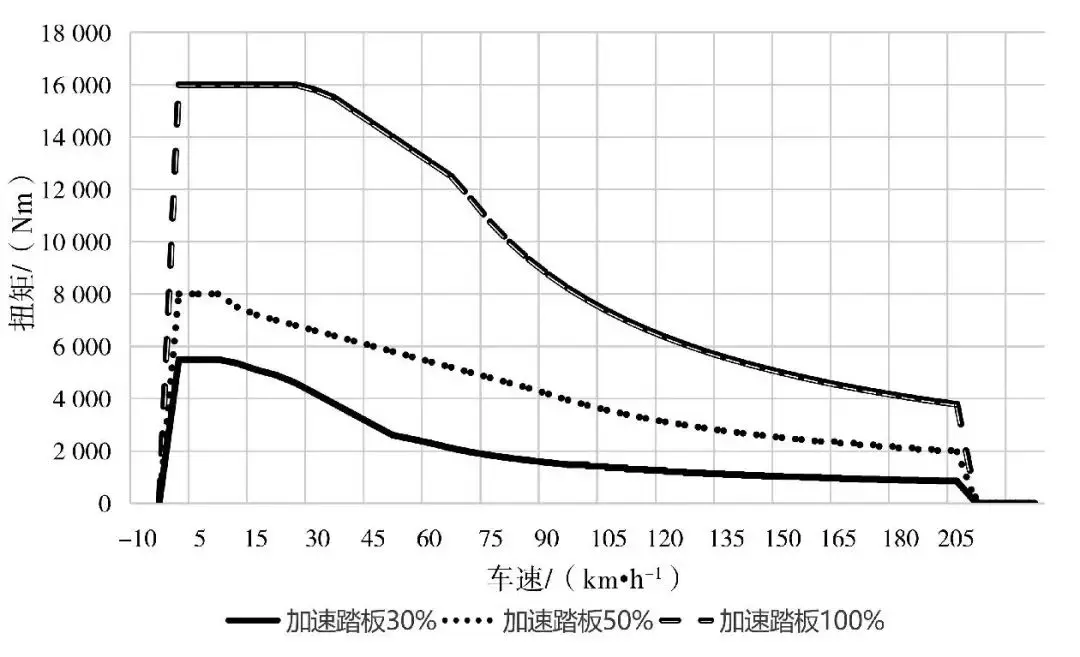
图7 双模越野车沙地模式加速踏板MAP
以沙漠刷锅工况为例,将车速与加速踏板深度信号去除尖点、毛刺等异常数据,得到车速、加速踏板深度曲线,如图8、9 所示。

图8 台架加载车速曲线
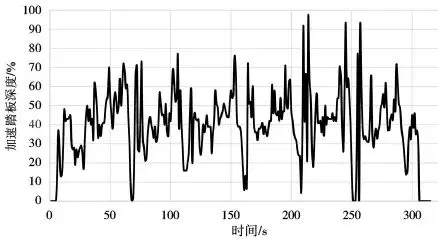
图9 台架加载加速踏板深度曲线
3.3 实车对比
将车速和加速踏板深度信号输入四电机能量流台架进行测试,如图10、11 所示,图10 中台架测试车速基本跟随实车车速,平均车速偏差为1%,符合试验预期;图11 为台架轮端功率趋势与峰值跟随实车测试结果的情况,轮端平均功率台架测试值为141 kW,与实车测试值144 kW基本一致,符合预期。通过台架测试可以复现沙漠越野工况车速及轮端功率动态变化过程,能够真实地验证热管理与保电性能,尤其可复现车轮瞬态打滑导致轮端功率突升的工况。

图10 实车与台架测试车速对比
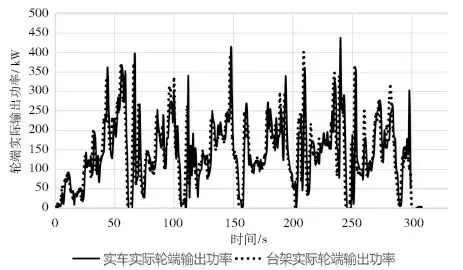
图11 实车与台架测试轮端功率对比
4 两台架试验对比
转鼓台架与四电机能量流台架复现沙漠工况结果对比见表1。
表1 两台架复现沙漠工况结果对比
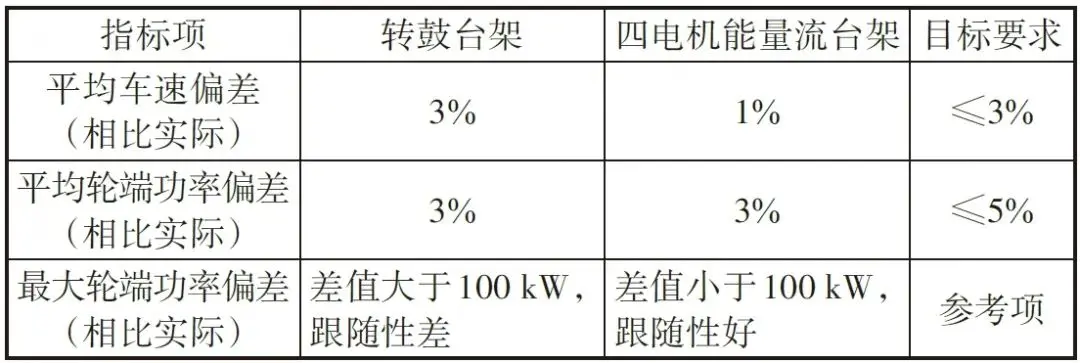
由表1 可知,四电机能量流台架复现沙漠工况的能力明显优于转鼓台架,并且可以复现车轮瞬态打滑导致轮端功率突升的工况,可进一步考核车辆动力性能。对转鼓台架与四电机能量流台架复现的沙漠工况进行整车保电和热管理性能考核,均符合预期要求,为有效验证这两项性能提供可能。
5 结束语
通过分析越野车沙漠行驶工况构建一个比较合理的沙漠越野综合工况,并通过分析四驱转鼓台架与四电机能量流台架的控制模式,对沙漠越野综合工况进行台架测试,结果表明,台架测试的等效程度符合预期要求,为验证双模越野车热管理与保电性能提供可能。
参考文献
[1]姜玉萍. 交流电力式底盘测功机的研究与开发[D]. 烟台:烟台大学,2017.
[2]王甲. 汽车道路阻力测算方法研究[J]. 北京汽车,2018 (5):6-10,46.
[3]刘会康 . 轮毂电机驱动混合动力越野车能量管理策略研究[D]. 武汉:武汉理工大学,2019.



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
