




 广告
广告





















































「鞭打试验」Euro-NCAP 2023版前排座椅鞭打规程

Euro-NCAP作为国际权威的汽车安全评价体系,是中国主机厂向外展示自身产品质量的重要窗口。蔚来、比亚迪、奇瑞和长城已有车型在欧洲执行Euro-NCAP并获得5星成绩,其中比亚迪ATTO元的鞭打更是获得3.9的高分(满分4分)。
此外,随着中国汽车出口步伐不断加快,越来越多的车型正对标国外法规或评价体系。因此作为座椅产品工程师,熟悉这些技术标准的任务也变得愈加紧迫。
本文就大家较关注的Euro-NCAP 前排鞭打评价规程和试验规程进行介绍,重点对静态测量的步骤进行了拆解,并做了举例说明。
一 评价规程
前排座椅静态评价和动态评价结合,静态2分,动态6分。详细说明如下,
1. 静态评价规程
静态评价总分2分,需要分别评估头枕在中间位置和最差位置的有效高度和头后间隙,两个位置各占1分。
中间位置静态取以下两者较差的结果,得分-1分到1分之间:
头后间隙小于等于45mm得1分,否则得-1分;
有效高度-1分~1分,755-825mm插值计算。
最差位置静态得分为1分或0分:
头后间隙小于等于70mm得1分,否则得0分;
有效高度大于等于790mm得1分,否则得0分。

举例1:某座椅中间位置头后间隙31mm,有效高度838mm,最差位置头后间隙48mm,有效高度809mm,那么该座椅静态测量得分应该为1+1=2分。
举例2:某座椅中间位置头后间隙46mm,有效高度838mm,最差位置头后间隙58mm,有效高度809mm,那么该座椅静态测量得分应该为-1+1=0分。
举例3:某座椅中间位置头后间隙31mm,有效高度800mm,最差位置头后间隙48mm,有效高度789mm,那么该座椅静态测量得分应该为0.29+0=0.29分。
2. 动态评价规程
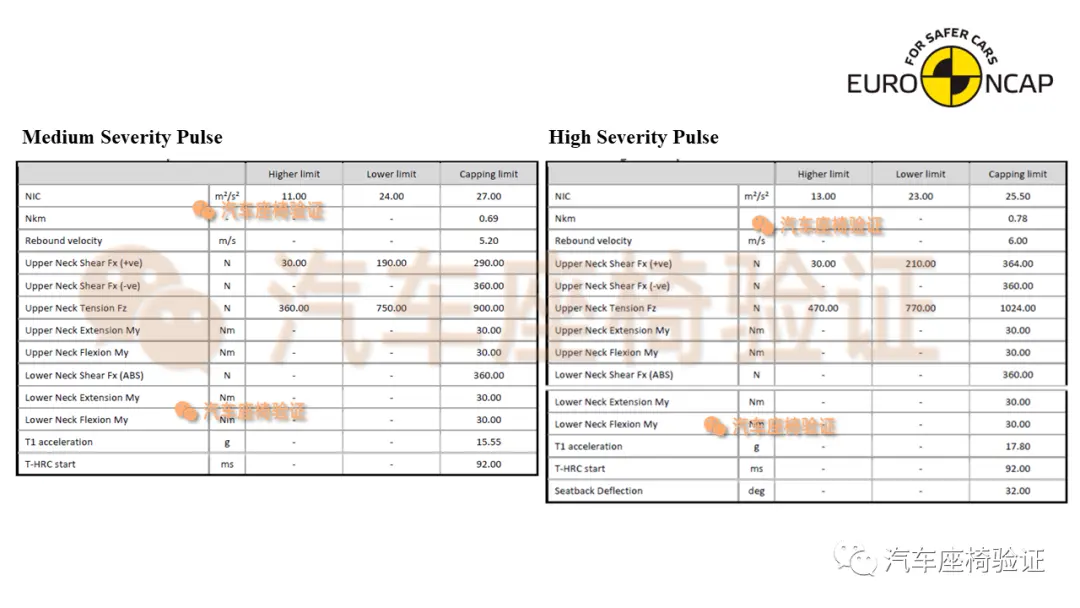
动态试验总分6分,高、中两种波形试验各3分,评分方法如下,
首先,三条得分指标各1分,最高得3分:
颈部损伤NIC,0-1分;
上颈部剪力, 0-1分;
上颈部拉力, 0-1分;
另外,有14条capping指标,超出阈值动态得分为0分。其中T1加速度和头部接触时刻需要同时超过阈值才生效。
最后,有2条扣分指标如下,
如果靠背变形角度大于等于32°,扣3分;
“Dummy Artefact Loading”,扣2分; (针对主动座椅/头枕,防止对人造成伤害)
举例4:某座椅中值曲线动态试验,NIC 18,7,UFx=6,UFz=562,无capping超出,那么该中值动态试验得分为0.41+1+0.48=1.82分。
举例5:某座椅中值曲线动态试验,NIC 18,7,UFx=6,UFz=562,Nkm=0.72,因为Nkm超出限值0.69,该中值动态实验直接0分。
3. 最终得分
静态和动态总分为8分,但最终需换算到3分制,计算公式如下:
最终得分=(静态+中值动态+高值动态)*3/8
其中静态得分=中间位置+最差位置,动态得分=NIC+上颈剪切+上颈拉力。
举例6:某座椅静态测量为2分,中值曲线动态得分1.82分,高值曲线动态得分2.8分,那么该座椅最终得分为:(2+1.82+2.82)*3/8=2.49分。
二 静态试验规程
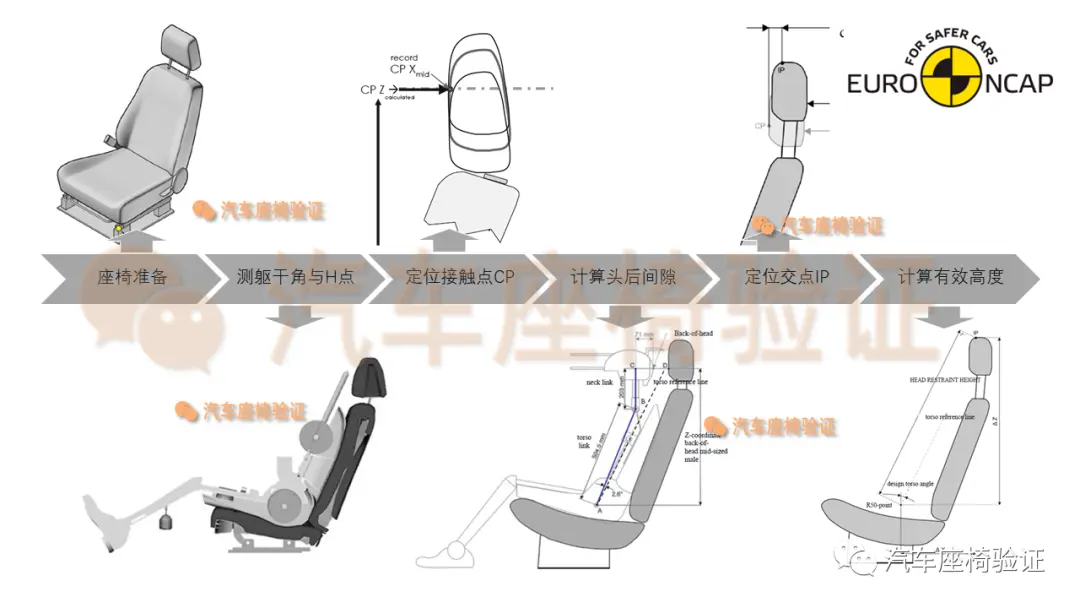
现行Euro-NCAP静态测量取消了HRMD,相比原先的流程复杂一些。以头枕在中间位置的静态测量为例,大致思路如下:
1)座椅准备 -> 2)测躯干角与H点 -> 3)定位接触点CP -> 4)计算头后间隙 -> 5)定位交点IP -> 6)计算有效高度。
1. 座椅准备
安装地板夹具、脚踏板夹具;使用三坐标测量装置,建立坐标系;
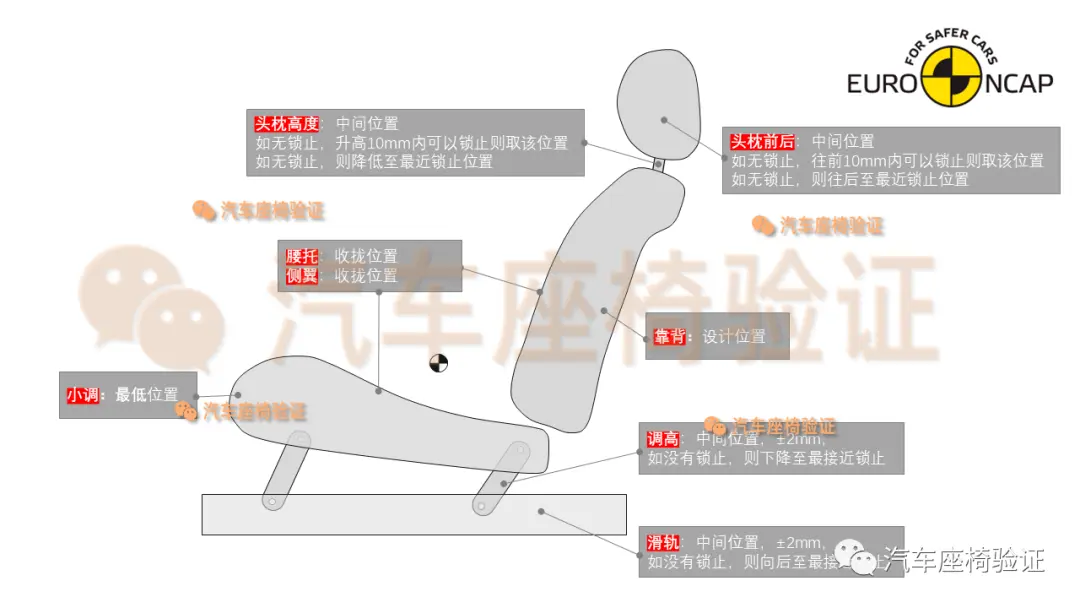
安装座椅样件,并完成初始化调节,滑轨最后,调高最低,小调最低,腰托、侧翼、扶手等机构调节到收拢位置;
滑轨调节到到中间位置,偏差±2mm,如若没有锁止位置,则向后调节至最接近中间位置的锁止位置;
高度调节到中间位置,偏差±2mm,如若没有锁止位置,则将其向下调节至最接近中间位置的锁止位置;
靠背调节到设计位置,可基于座椅骨架或塑料上的参考点,确认靠背已调节到位;
头枕高度调节到中间位置,该处为最高锁止和最低(头枕与靠背接触)位置的中间,如此处无法无锁,将头枕升高10mm内可以锁止,则取该位置。若还没有锁止位置,则将头枕向下调节到最近的锁止位置;
头枕前后调节到中间位置,该处为最前锁止和最远(头枕与靠背接触)位置的中间,如此处无法无锁,将头枕前调10mm内可以锁止,则取该位置。若还没有锁止位置,则将头枕向后调节到最近的锁止位置。
其他调节结构保持在初始调节位置。
2. 测躯干角与H点
根据要求安装HPM;测量座椅躯干角,测量结果要在设计躯干角±1°以内;测量座椅H点,左右侧偏差在±2.5mm以内,平均值与设计值偏差应在±10mm以内;
如没有提供躯干角或H点的设计值,或测量躯干角超出偏差范围,或测量H点超出偏差范围,则需要进行重复测量,计算最后连续3次测量的躯干角与H点的平均值,两者均应在各自的偏差范围内,如果H点平均值依旧超出偏差,则在后面的程序中采用实测H点。
关于重复测量的几点说明:
重复测量需要将配重块和HPM设备全部移除后,再根据规程重新测量。
连续重复测量时不能调节靠背,如果因为要满足与设计值的偏差要调节靠背,则需要保证最后连续3次测量靠背位置不变。
连续3次测量H点结果之间相差应不超过5mm。

3. 定位接触点CP
首先头枕此时应在中间/中间位置。
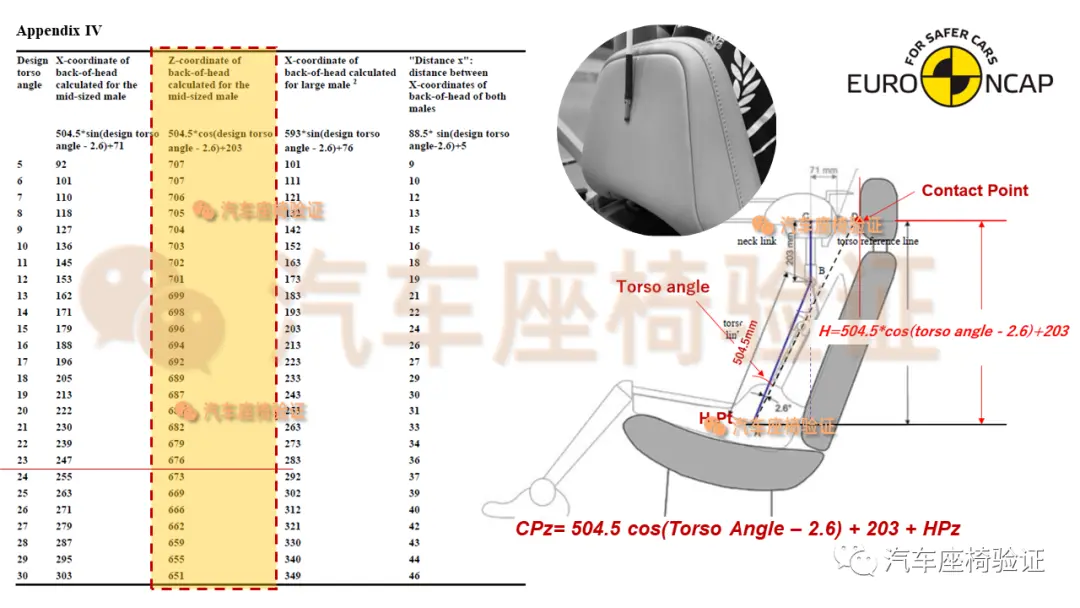
基于躯干角与H点坐标,通过如下公式计算接触点高度线CPz,该高度线与座椅中轴面在头枕前表面的交点即为接触点CP。该公式基于HPM与HRMD设备的几何关系推导而来。
CPz= 504.5 cos(α– 2.6) + 203 + HPz
也可基于设计躯干角,在附录IV表格第三列找到对应的值,然后加上HPz即可。打个比方,如果设计躯干角度为23°,检索表格返回的值为676,那么上述公式可简化为,
CPz= 676+ HPz
如果接触点的Z坐标水平线超出头枕顶部,则应将头枕向上调节到可以确定接触点CP的锁止位置。
如果还是没有交点,则取头枕最高水平点为接触点CP,若多个水平点,则取最前面的为接触点CP。
如果头枕前端有间隙导致无法确定接触点CP,应将采用165mm球型,球心高度与CPz一致,往后移动直到接触头枕,球型水平中心线上的最后点即为CP点。
4. 计算头后间隙
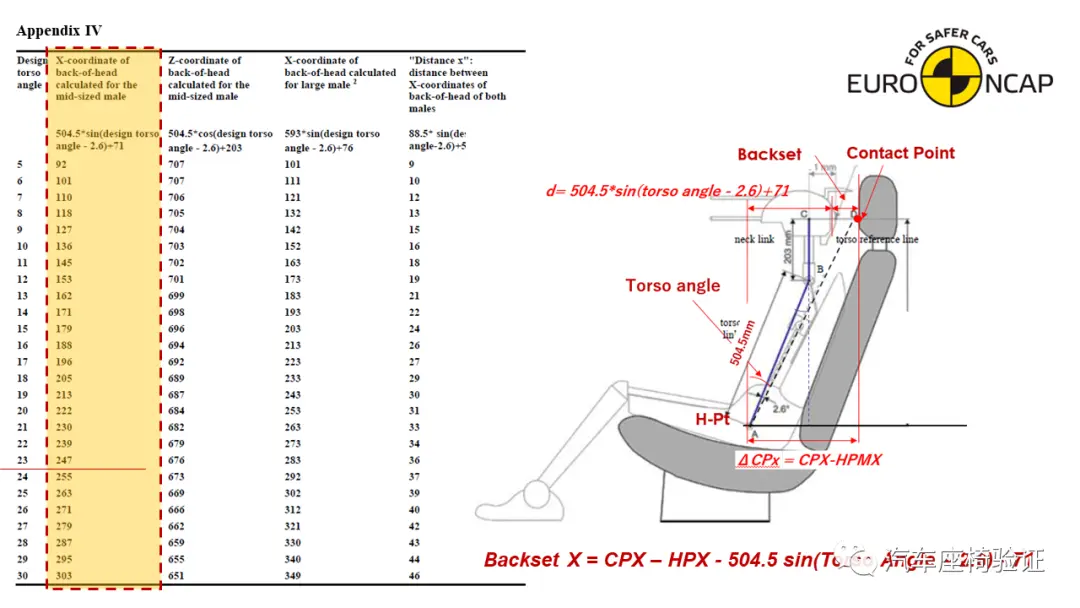
在头枕上找到接触点CP后,测量接触点在X方向的坐标值CPx,然后基于如下公式计算出头枕在中间位置的头后间隙值。
Backset X = CPX – HPX - 504.5 sin(α – 2.6) - 71
也可基于设计躯干角,在附录IV表格第二列找到对应的值,然后用CPx减去HPx和该值即可。
5. 定位交点IP
将头枕调节高最高位置,前后位置不变。基于设计躯干角和已知的CPx,计算出IP点X方向的坐标值,计算公式如下,也可基于设计躯干角,在附录IV表格第五列找到对应的值,然后加上CPx即可。
IPX = 88.5* sin(α-2.6)+5 + CPX
该垂线与座椅中轴面头枕前表面的交点即为交点IP。
如IP点在头枕水平最高点后方,则IP点标注在头枕水平最高点。如不存在实际IP点,则IP点标注在头枕水平最高点。

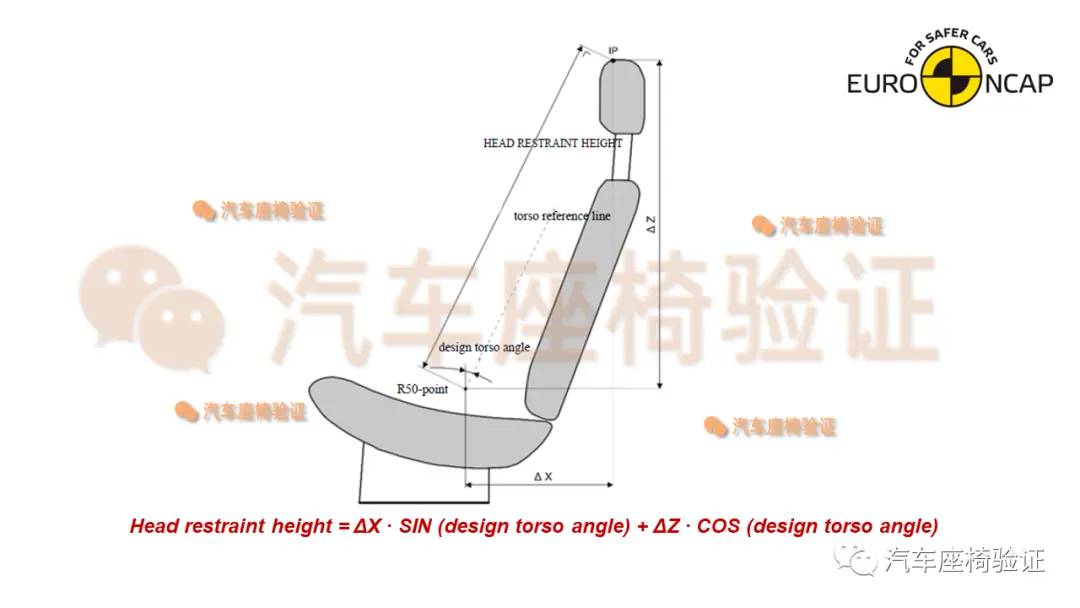
6. 计算有效高度
确定好交点IP后,将头枕调整到中间/中间位置,并测量交点在该位置X和Z向的坐标值,计算H点坐标和IP点坐标在X与Z方向的差值ΔX和ΔZ,基于如下公式,计算中间位置的头枕有效高度,
Eff. height = ΔX∙sin(α) + ΔZ∙cos(α)
举例7:某座椅,
设计值:HPx=1282.70mm,HPz=516.00mm,躯干角=23.00°,实测值:HPx=1280.70mm,HPz=524.27mm,躯干角=22.97°,计算步骤如下,- 由于测量结果在偏差内,则应该基于设计值,计算CPz=676+516=1192mm,
- 基于CPz值,在头枕前端找到接触点CP,并记录CPx=1547.10mm,
- 基于CPx值,计算Backset =1547.1-1282.7-247=17.40mm
- 基于CPx值,头枕调节到最高位置,计算IPx(um)=1547.10+36=1583.10 mm,
- 基于IPx值,定位IP位置,然后将头枕调节到中间位置,测量IPx(mid)与IPz(mid),
- 基于IPx(mid)与IPz(mid),计算得出中间位置头枕的有效高度Heff.(mid)=832.89mm.

三 动态试验规程
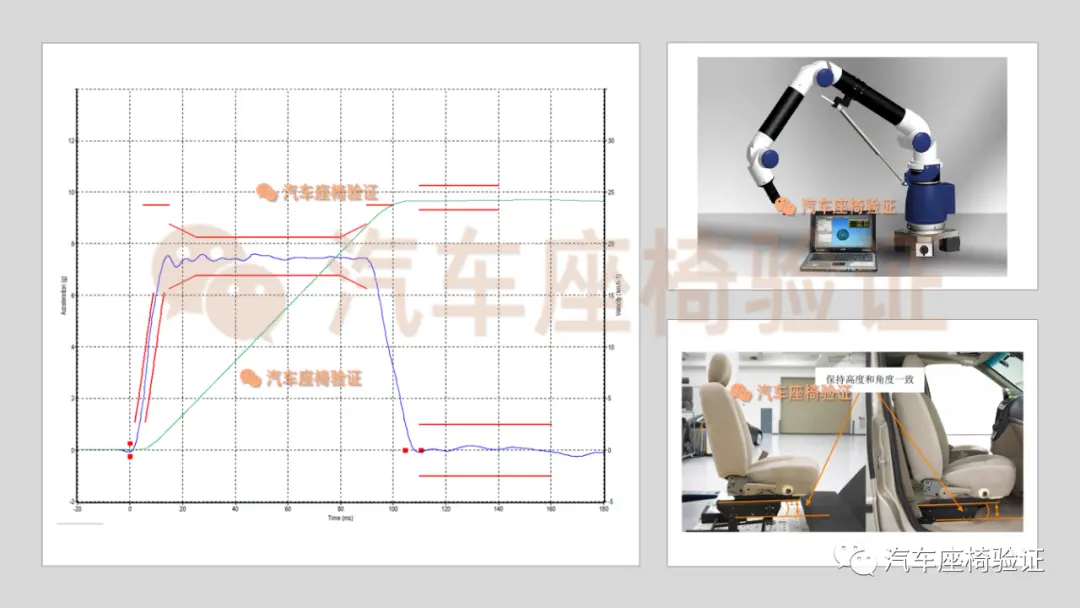
1. 试验准备
可将座椅固定到白车身或工装上进行该试验;
安装地板夹具、脚踏板夹具,安全带固定点夹具;
标定滑车系统的加速度曲线,高值曲线约24km/h,中值曲线约15km/h;
使用三坐标测量装置,建立坐标系;
安装座椅样件,并完成初始化调节;
安装安全带,以防止假人在冲击过程中飞出;
对于主动式头枕,需要设置好触发时间、触发电压。
2. 座椅调节
与静态测量(头枕中间位置)相同。
3. 静态测量
与静态测量(头枕中间位置)相同。
4. 假人摆放
摆放Bio-RIDII假人;
调节和检查假人骨盆倾角,设计躯干角+1.5°,偏差±2.5°以内;
调节和检查假人H点坐标,静态记录结果往前10mm,X&Z方向偏差±10mm以内;
调节假人大腿和小腿距离,距离200mm±10mm;
调节假人鞋在脚踏板位置,鞋尖位置在踏板230mm~270mm;
调节假人大臂和手指位置,上臂接触座椅靠背,肘部弯曲,双手掌心与大腿两侧相对,小指与座垫的上表面接触;
调整和检查假人头部倾角,水平±1°;
调整和检查假人的头后间隙,静态记录结果+15mm,偏差±5 mm以内,如头后间隙无法满足,可以通过调整头部倾角、骨盆角、H点使头后间隙满足偏差要求;
最后调整安全带松紧,一切准备就位,拍照记录后便可发射台车。







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
