




 广告
广告





















































基于HIL系统的高级驾驶辅助系统(ADAS)测试

随着汽车智能化、网联化的快速发展,高级驾驶辅助系统(Advanced Driver Assistance System,ADAS)作为一项重要的主动安全措施,在有效提高汽车安全性和舒适性的同时,也是向汽车自动驾驶终极目标迈进的必由之路。
近年来随着ADAS技术的逐渐发展,测试需求也在不断增多,测试难度也越来越大。采用硬件在环仿真测试(Hardware-In-the-Loop,HIL)方法,结合实时虚拟仿真技术,并利用硬件在环技术(HIL)路线搭建测试平台框架,能够更好地对所开发的ADAS控制器进行测试分析,缩短开发周期,对车辆ADAS进一步的开发及测试奠定良好的基础。

ADAS hil测试系统架构
1、ADAS测试平台原理及架构
先进驾驶辅助功能(Advanced Driving Assistance System,ADAS)的地位正在凸显有别于传统的汽车技术,ADAS系统开发过程中将出现大量的新科技和新功能。如何进行ADAS系统的测试是目前公认的难题,也是产业发展中亟需解决的问题。
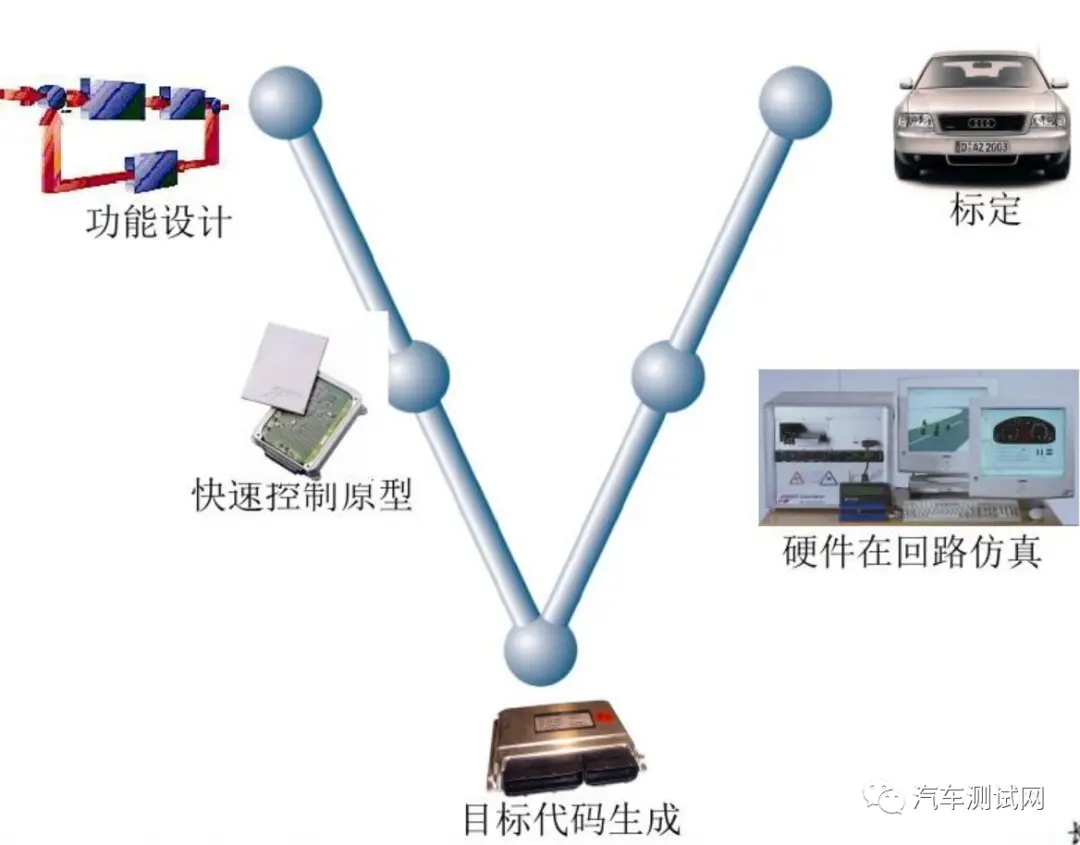
“V”模型开发流程
ADAS系统功能的开发遵循“V”流程,测试阶段包括模型在环(MIL)、硬件在环(HIL)、实车路试等。相比于纯计算机建模仿真,ADAS硬件在环测试这种半实物仿真技术能实时检测系统的数据,更接近实车测试。相比于实车测试,可以很好的规避测试中重复性验证、开发周期长、成本高等问题。
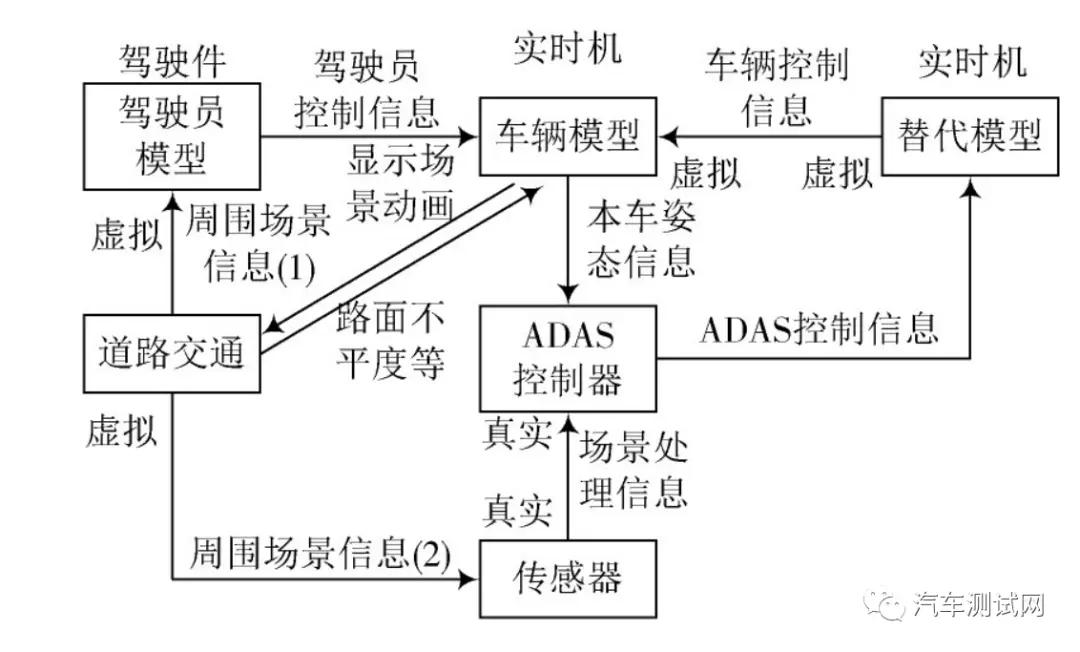
ADAS控制器硬件在环测试技术路线
ADAS测试系统主要由上位机、I/O通道系统、实时仿真系统、被测域控制器等组成。在ADAS硬件在环实验中,实时系统运行仿真模型,然后通过I/O接口与被测ADAS域控制器通信,利用自动驾驶仿真软件中的虚拟摄像头采集视频信号或者虚拟雷达采集障碍物信号来模拟实车行驶环境,使控制器误以为处于实车行驶的环境中,从而达到对ADAS域控制器测试的目的。
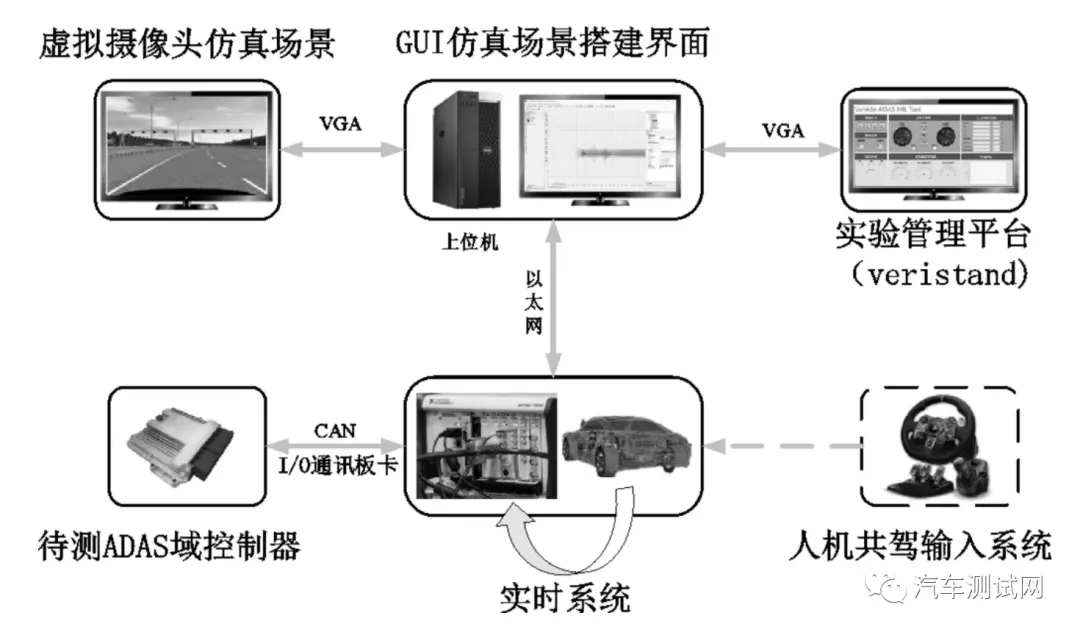
ADAS域控制器硬件在环测试整体架构
ADAS系统测试所需要传输的I/O信号类别:
(1)模拟信号:即用连续变化的物理量表示的信息,如方向盘转角、制动压力等连续输入量。
(2)数字信号:通常为一些设备或者功能的开关信号,如点火开关、功能开关等,用来检测功能的状态。
(3)CAN信号:主要为车身各个传感器、执行器与各个控制器间的交互信号。在硬件在环测试中即为被测控制器与受控模型间的信号传输。
2、HIL测试系统原理
硬件在环仿真测试(Hardware-In-the-Loop,HIL)提供了一个可重复的实验室环境,用于安全、灵活和可靠的控制器验证。HIL的完整系统可以是真实的,也可以是虚拟的,包括传感器、执行器和控制器。
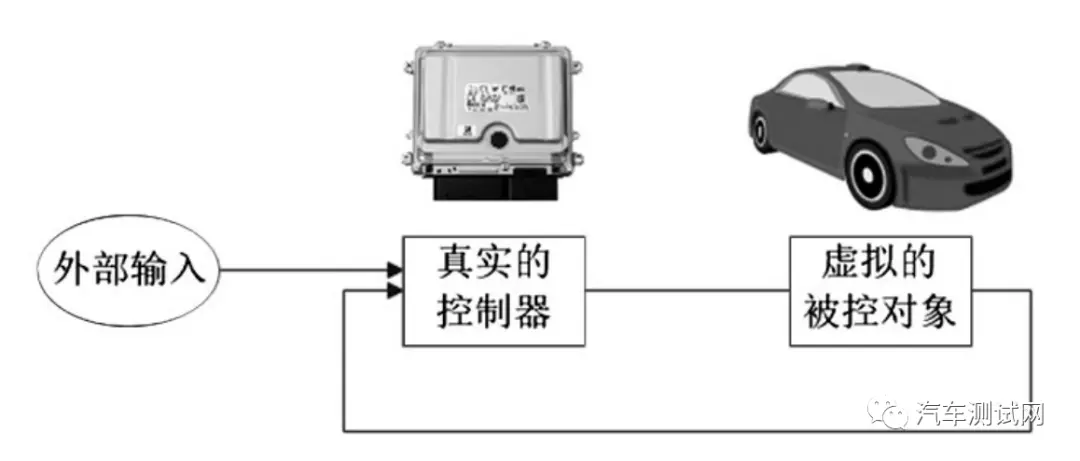
HIL系统示意图
HIL提供了模拟的灵活性,使用真实组件可以提高模拟的可靠性。控制器的性能和稳定性可以在不受其他外部干扰的情况下进行测试,还可以通过控制抖动和故障注入来验证可靠性。由于在HIL系统中可以模拟所有的车辆部件,因此在早期开发阶段可以解决原型车和真实部件缺失的问题,加快开发进度。

HIL系统架构
HIL系统的基本功能需求如下:
(1)实现系统集成、配置、测试环境界面;
(2)实现模型所有测试变量、参数的任意调用、实时记录、曲线显示;
(3)实验环境数据采集速率满足1ms、10ms等要求;
(4)实现仿真过程的在线控制(启动、停止),并具备测量、标定、诊断功能;
(5)任务调度的监视、各个子系统运行周期的监视;
(6)能用脚本调用完成自动测试。
3、ADAS HIL测试系统架构
为实现高级驾驶辅助系统的仿真测试,解决传统实车验证中费用高、周期长、测试场地复杂等问题,构建ADAS HIL测试平台。采用硬件在环仿真测试方法,结合实时虚拟仿真技术,并利用硬件在环技术路线搭建的测试平台框架,提出了一种基于HIL的ADAS仿真测试平台。
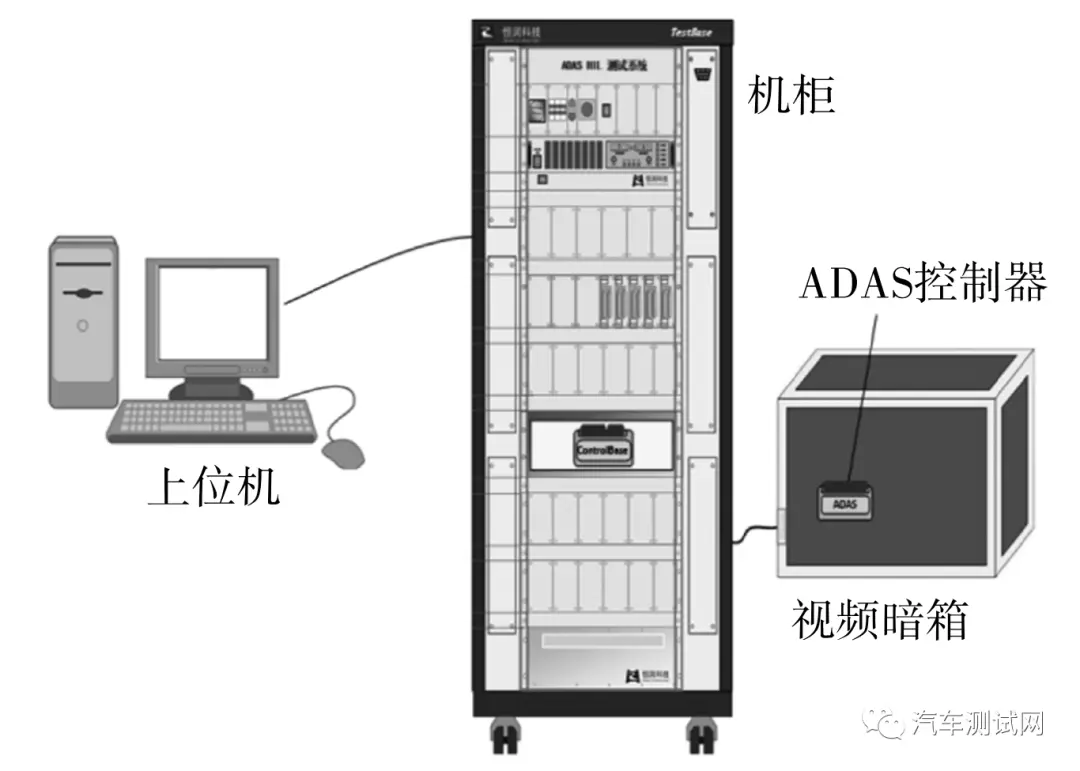
ADAS HIL测试硬件主要包括上位机、机柜、视频暗箱等。
上位机:用于运行测试管理软件及显示车辆运行时摄像头视角小的场景动画,其通过实时回读下位机回传的信号更新;
机柜:主要由下位机、I/O板卡及电源模块组成,运行时,下位机从上位机下载车辆模型并编译,然后实时运行车辆模型,之后通过I/O板卡与被测控制器实时通信;
视频暗箱:主要由被测控制器及播放场景动画的显示屏组成,含有摄像头的ADAS控制器放置于视频暗箱内,对相机进行标定,消除安装误差后可以采集显示器播放的场景动画。
采用成熟的车辆仿真软件,按照测试需求设定相关参数,搭建测试所需的虚拟车辆模型和道路交通场景。配置输入输出接口参数(本车及周边车辆的油门开度、刹车压力、转向扭矩、位置坐标、车速及加速度等)和对应的替代模型,然后进行联合仿真。
硬件在环测试(HIL)可以弥补实车测试安全系数低的缺点,并且测试效率高、覆盖度广,还可以实现自动化测试。
4、模型设计与搭建
(1)仿真场景模型
根据ADAS系统的功能规范及测试用例,分析相关测试场景,设置不同道路参数例如道路的曲率、长度、车道数目、车道线标记等。添加必要的环境信息,如建筑物、基础设施、天气模型(如雨、雪、雾等)以及光源(如交通信号灯、太阳光、路灯等)等。
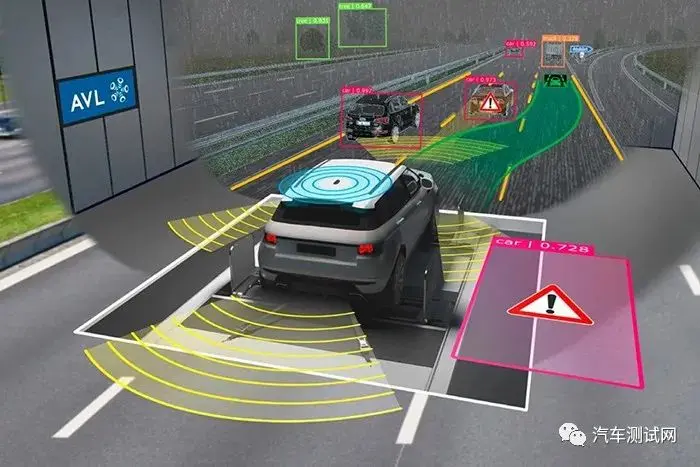
ADAS仿真场景
(2)ADAS传感器模型
还需要建立基于真实传感器参数的虚拟模型,进行传感器的参数化建模。例如单目、双目、全景摄像头,毫米波雷达、激光雷达等。涉及传感器的参数包括摄像头的像素尺寸、帧速率、FOV角以及安装参数等。
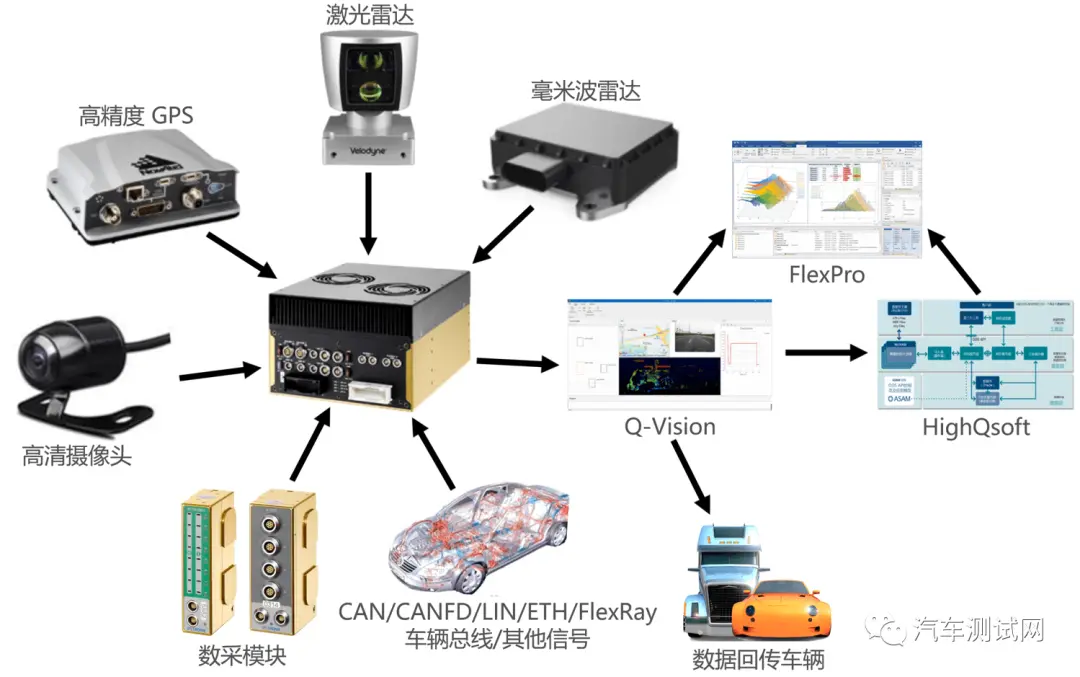
ADAS传感器
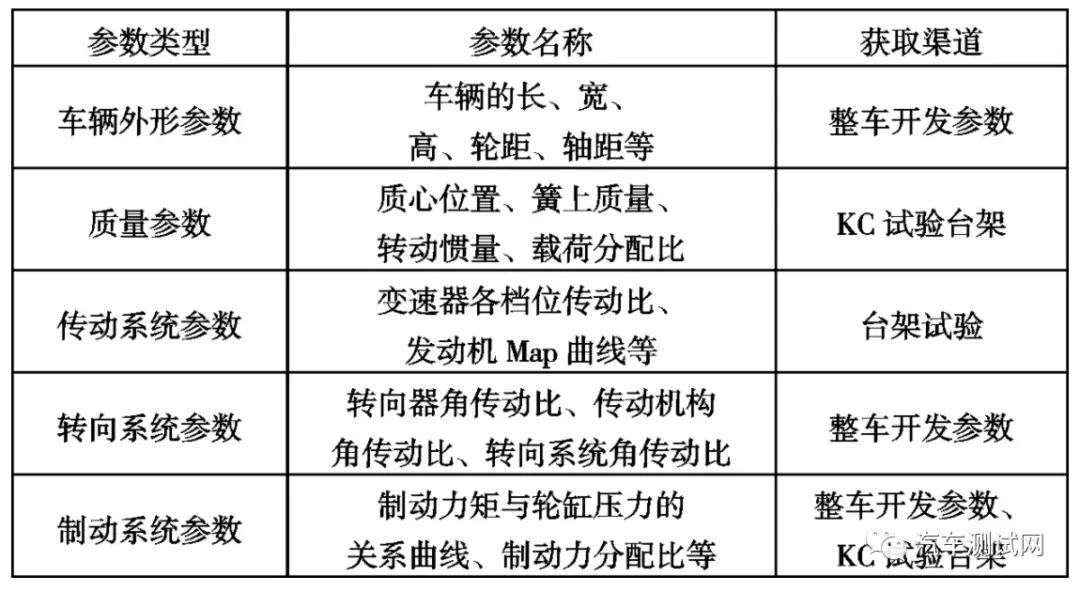
(3)车辆动力学模型
在HIL测试环境中,获得车辆对控制逻辑响应的真实信息需要搭建一个可靠的车辆模型。车辆模型能够根据模拟驾驶员的输入状况,计算出车辆的状态及位移,实时更新虚拟场景。根据实验目标车辆的开发参数及台架试验数据进行建模,整车动力学参数的类型及获取渠道可参考下表。
车辆动力学模性参数表
5、测试验证与分析
自动驾驶的测试分为基于场景和基于里程的测试,均可用于虚拟环境和真实路测环境。
基于场景的测试主要是针对被测功能或部件,通过预先设定的测试环境进行测试。
基于里程的测试较为连续,不需要特定某项环境设置就可以连续不断地测试和采集,在大量的车辆数据中对功能和部件的工作效果进行分析。

ADAS HIL测试系统可以按照事先编写好的测试用例表对系统进行自动化测试的方法。自动化测试建立在测试环境已经搭建调试完成的基础上,用自动化测试程序对测试用例的输入信号依次进行赋值,再根据测试用例的输出值进行比较确认。测试完成后,会自动生成本次测试的测试报告,测试报告的内容包括:测试结果和预期结果是否一致、信号期望值与实际值之间的比较(包括误差和允许误差范围)等。
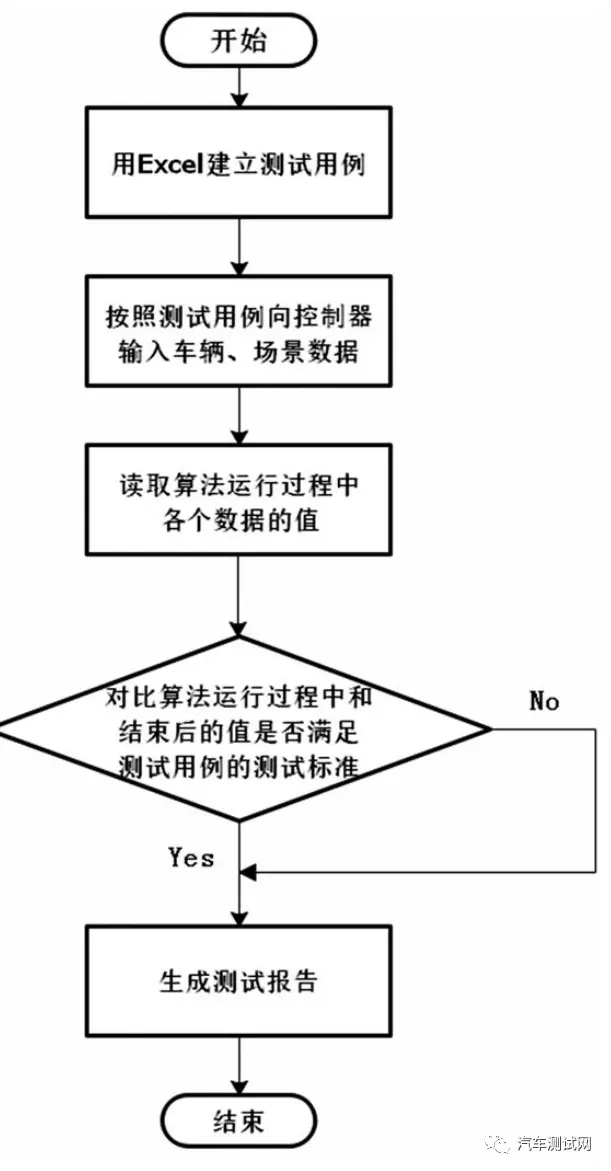
ADAS自动化测试流程
ADAS HIL测试系统通过在上位机软件中开发实验管理的人机交互界面,便可在虚拟条件下完成针对ADAS不同功能、不同工况下的硬件在环测试。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
