




 广告
广告





















































吉林大学朱冰教授团队研究成果:智能网联汽车协同感知信任度动态计算与评价方法

《汽车工程》2023年第8期发表了吉林大学朱冰教授团队研究成果“智能网联汽车协同感知信任度动态计算与评价方法”一文。针对智能网联汽车协同感知过程中面临的检测信息真实性与协同车辆可信度问题,结合车辆协同网络中共享的检测结果信息,论文提出了一种基于遮挡状态判别与检测有效性识别策略的智能网联汽车信任度动态评价方法。仿真验证表明,该方法可提升协同感知车辆对检测结果的可信度,增强智能网联汽车协同感知过程的鲁棒性。
一、研究背景
受限于传感器的感知范围,传统的单车感知已难以满足智能网联汽车在复杂交通场景的感知需求。通过同一区域内多个智能网联汽车的传感器感知信息共享进行协同感知已成为发展趋势。但智能网联汽车的通信网络具有开放性、动态性和分布式等特点,并可能存在恶意攻击和不真实信息等干扰,因此协同感知过程中车辆间共享信息的真实性与可信度是亟待解决的问题。
二、研究内容
1. 智能网联汽车的检测信任度计算与评价方法架构:包含车辆的三维感知检测、检测对象匹配评估与遮挡判别、检测对象有效性识别与协同信任度计算三个模块。整体架构运行于各智能网联汽车中,协同网络中车辆通过车载通讯单元(On Board Unit,OBU)实现各功能模块数据信息的广播与接收。
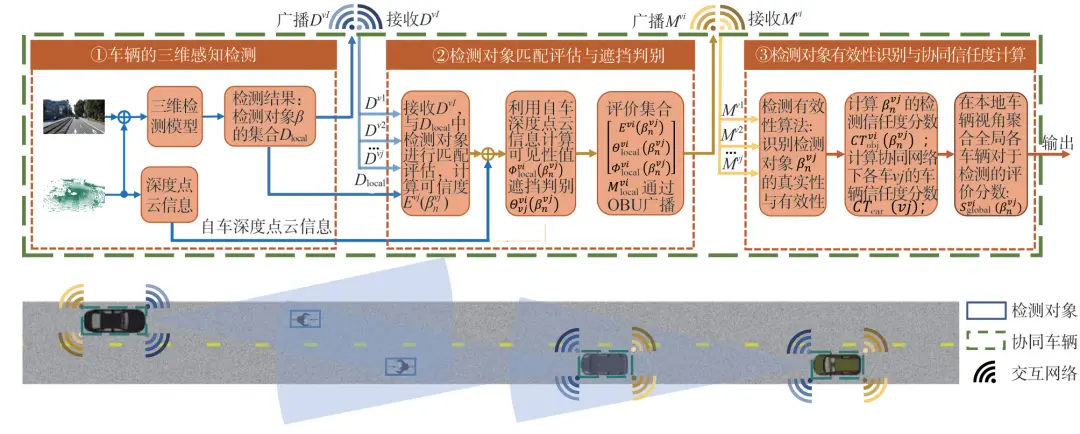
图1 检测信任度计算与动态评价方法架构
2. 检测对象匹配评估与遮挡判别:首先,协同车辆接收其他车辆的检测集合广播,进行检测对象间的坐标与阈值匹配;然后,将检测对象间包围盒三维交并比(Intersection over Union, IoU)超过阈值的认定为同一检测对象;同时,基于车辆视角下的视锥体模型,判断各检测对象在不同协同车辆视角下的遮挡状态,完成各协同车辆间的互相评价过程;最后,协同车辆将上述关于其他车辆及检测对象的评价结果,通过OBU再次广播给协同网络内的其他车辆。
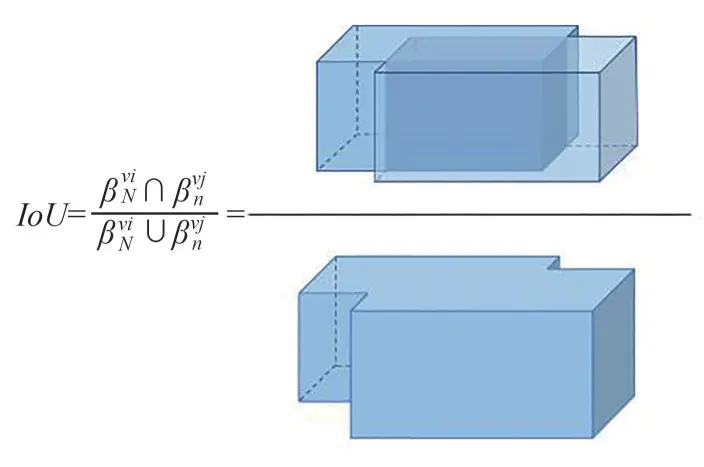
图2 IoU计算示意图
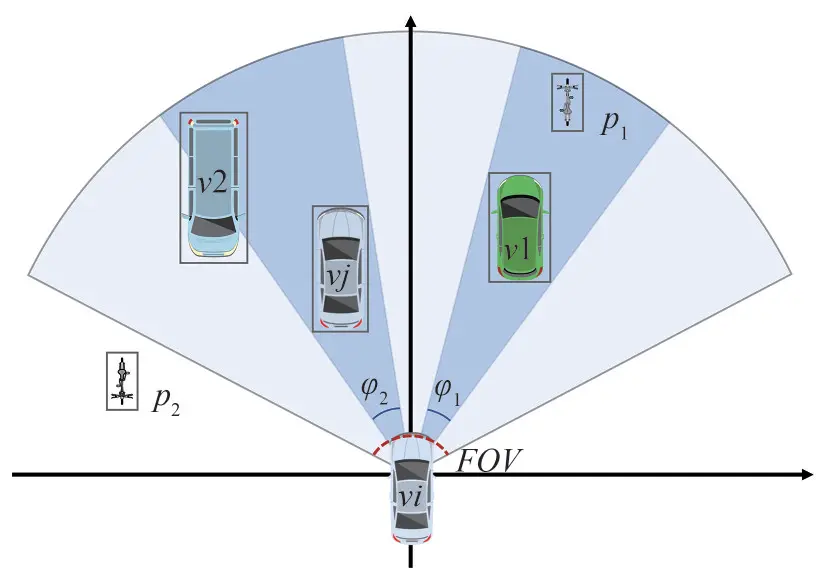
图3 视角遮挡关系示意图
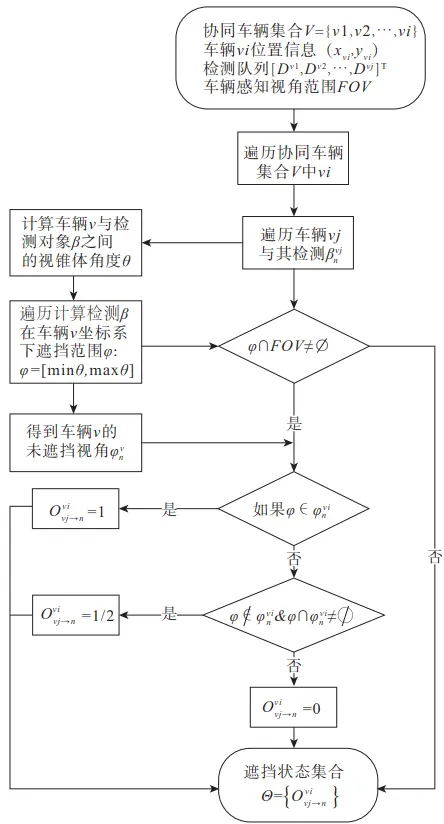
图4 遮挡判别算法流程图
3. 检测对象有效性识别与协同信任度计算:针对协同网络中恶意攻击车辆向正常广播信息中插入虚假检测信息或瞒报检测信息,以干扰正常协同感知的复杂工况,通过接收其他协同车辆的广播信息,联合各协同车辆评价集合对车辆实体的信任度进行评价,进而从检测信息中甄别出虚假信息。
4. 仿真验证:为测试验证论文所提方法,设计了含有多元素交通参与者的双向会车场景,通过 Prescan 与 Simulink 软件联合仿真,完成对模型方法有效性的验证。
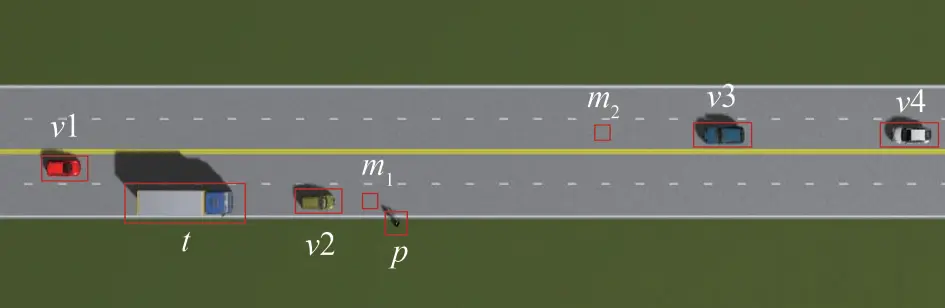
图5 仿真场景俯视图
三、研究结果
1. 协同车辆信任度的动态响应:在面对高信任度车辆的恶意攻击,论文所提方法能够快速响应,可准确甄别协同感知中的异常车辆,并在其恢复正常广播状态后,回调该车辆在协同网络中的车辆信任度。
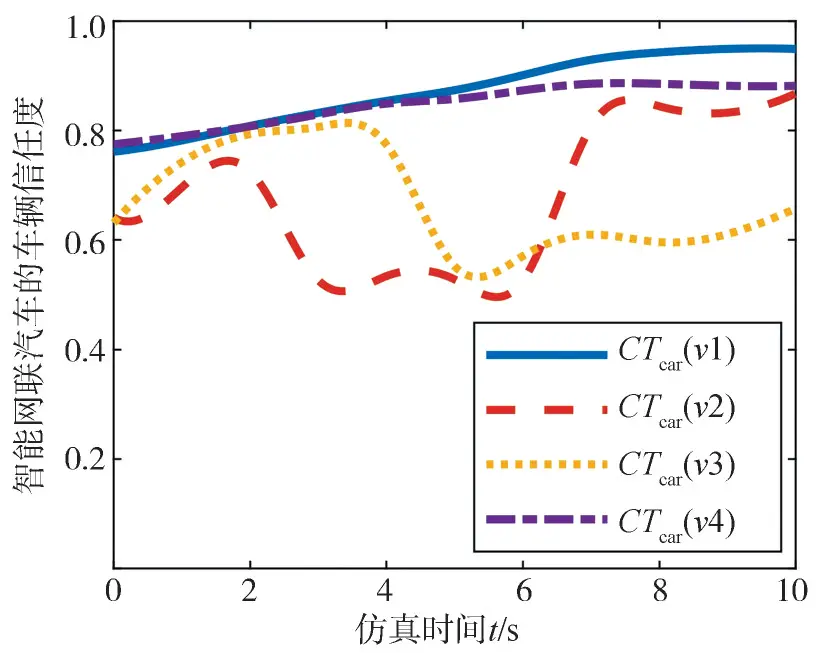
图6 协同感知下各车辆全局信任值
2. 截断状态检测对象识别:论文中提出的动态聚合方法显著提升了车辆 v1 对于被遮挡检测 v2 的感知评价分数,且面对车辆 v3 的恶意攻击行为,并未对检测曲线产生显著的波动影响,增强了协同感知车辆对检测结果的识别能力以及车辆协同感知过程的鲁棒性。
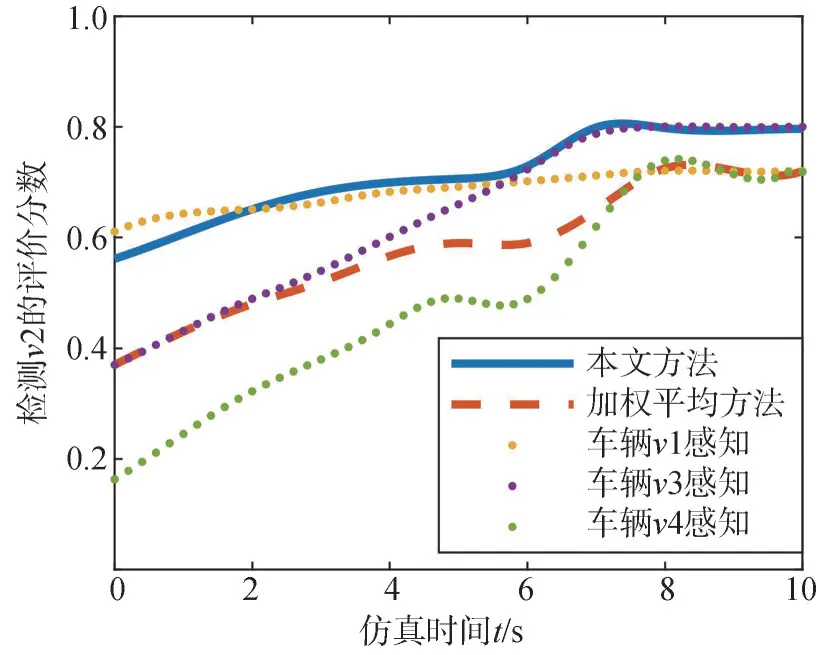
图7 协同感知下对截断检测的信任度
3. 被遮挡检测对象识别:论文所提方法通过有效性识别筛选异常车辆中的可信任信息,判别车辆 v2 与 v3 在检测对象p的广播信息中是否插入恶意攻击,以获得协同车辆在可信状态下的检测评价分数,获得了优于传统信任管理方法的感知性能。
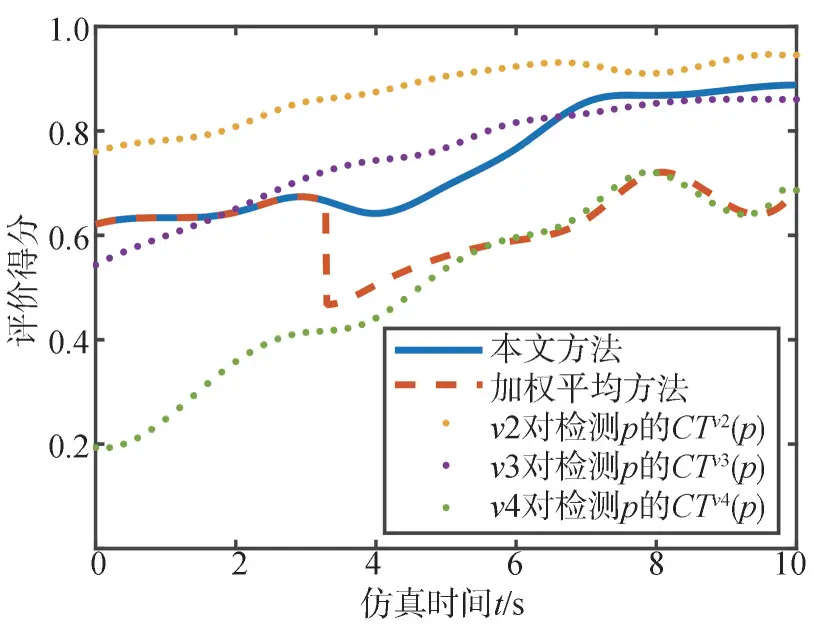
图8 车辆 v1 视角下被遮挡检测的评价分数变化
创新点与意义
针对协同网络中出现的异常车辆和恶意攻击信息会影响协同感知结果的真实性与有效性问题,论文提出一种基于遮挡状态判别与检测有效性识别策略的智能网联汽车信任度动态评价方法。该方法可准确识别智能网联汽车协同感知过程中的异常车辆与恶意攻击行为,提升协同感知车辆对检测结果的识别信任度,实现信任管理模型面对高信任车辆突发恶意攻击的实时动态响应,增强智能网联汽车协同感知过程的鲁棒性。该研究为智能网联汽车协同感知信任提供了可行参考,具有重要的工程应用价值与指导意义。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
