




 广告
广告





















































动力传动系统激励的boom音/粗糙度

1 问题描述
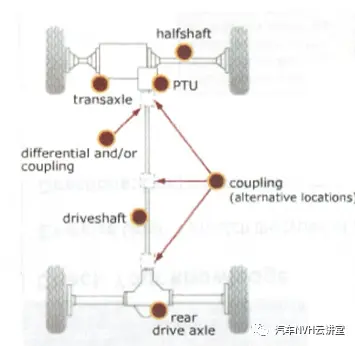
在乘客车厢里面的感受到的动力传动系统的声音和振动是由传动系统低阶次旋转激励而成的。经验得知它们大多发生在75Hz以下,包括30-75的可听到的和0-75Hz可触到的感觉,后轮驱动的车用一根传动轴给变速箱动力但是容易受质量不平衡、轴的小齿轮失效、不统一的运动连接点激励的影响。前轮驱动车可触到的响应主要是由于较大的半轴不连续速度接点的工作角度产生的。
2 激励源
传动系统的激励源可以按照它们工作时的阶次分,最重要的还是一阶和二阶。
2.1 一阶传动系统的激励
一阶激励通常来自于传动轴与相应法兰盘的质量不平衡和车轴小齿轮的牙距错误,连杆不直,总的激励是这些激励的矢量和。
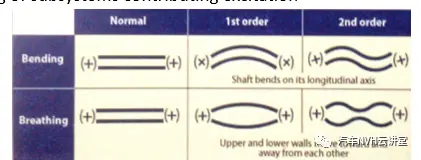
1、为了结构的整体性,传动轴设计时应注意在最大转速时它的弯曲度较小,这就必须将轴向质量不平衡带来的前后联轴器残余问题考虑在内。尽管经验显示目前大多数一阶激励来自传动轴后部位置,但是我们不应该局限在此,尤其设计到双传动轴与非独立悬架系统,总的来说,这里讲的质量不平衡会带来一个随转速增加的力。
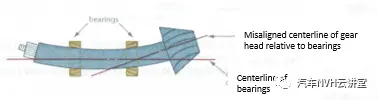
2、一阶车轴齿轮的跳动也是一个主要的激励源,在生产加工过程中的热处理、研磨和轴承径向精加工,一种叫偏心率的现象就被引入造成齿轮牙齿不同的几何中心线,在齿轮和轴旋转时这种错误就会产生一个瞬时的速度变化,像凸轮一样每转都会产生一个持续的位移超差。
2.2 二阶次激励
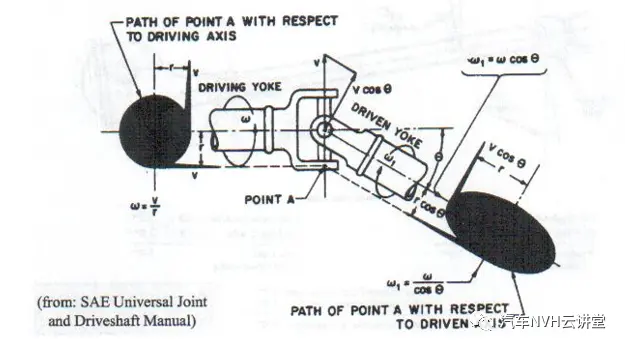
由于成本和包装的原因,CARDON和HOOKE万向节广泛应用于汽车的传动系统,当它的工作角度大于零时,这种非连续转速的万向节就会产生二阶次转速的不平衡。
3 传动系统运转不平衡设计注意事项
3.1 单传动轴与双传动轴
总的来说,双传动轴有这种减少传动轴本身质量和降低不平衡性及增加弯曲频率的优势。这种优势可以用来补偿短轴万向节角度大而引起的二阶次问题,除此之外,由于结构需要中心轴承支架应靠近底板对称中心,根据北美整车及传动轴经验,我们认为传动轴运转不平衡主要还是发生在单传动轴上。这种设想需要后悬架在满载时提供静态万向角度,车轮运行工况,以及大量的加工制造规范必须得到证实。在欧洲是不允许用单传动轴的,因为对于4缸机来说在高转速时,单传动轴会降低传动系统的弯曲频率,会在二阶次产生BOOM声。
3.2 传动轴中万向节角度
总的来说,设计小角度的万向节,使用成本和重量都适合的单CARDON万向节是值得的,一个整体设计需求应该考虑这两个角度和任何一个万向节角度的最大值不同,传动轴万向节角度的前后相位通常被定住,以至于在连接套管上的二阶次激励也没有了,考虑到前面提到的惯性扭矩问题,强烈建议CARDON万向节不应在大于3度的条件下工作,整个角加速度应小于疲劳寿命需求300rad/s*s,如果这些条件不能满足的话,强烈建议改换双CARDON万向节的传动轴或等速万向节传动轴。
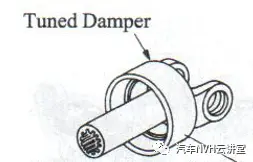
3.3 柔性联轴器
一个单CARDON万向节的代替品就是一个弹性连接的万向节,柔性联轴器可以提供非等速万向运动且万向角度小与2度,柔性连接可以提供弹性吸收各个方向的冲击,这种具有低冲击高阻尼的传动方式可以大大增加传动部件的服务寿命和减少传动不平衡。通常柔性连接装置利用一个相对简单的多边形构成,这个多边形由装着硫化橡胶的衬套构成。其他的设计通常采用橡胶包线带着一个相邻的弹性材料的连接衬套,所有这些设计都运用非金属材料连接而且对提高整车的NVH有很大的帮助。
3.4 小齿轮角度控制
通常在低载荷和扭矩情况下设计较小的二次万向节激励还是比较容易的,但是当载荷和扭矩增加时,问题就出来了。因为后部悬挂参数较大的万向节角度可以改变,而且能控制小齿轮角度变化。
这个悬架可以提供有效的回转振动率(簧下质量绕Y轴转动)来承受传动轴扭转的最大值,不会造成小齿轮角度变化过大,也可以保持后等速万向节角度不会发生跳动,EAO已经确立了一种后轴回转振动的规范并广泛应用,5度30分为传动轴的角度,2度为独立式后悬架角度,满足这些条件的扭矩臂悬架已经显示出良好的低传动系激励灵敏度,悬架利用带有短跨距要求刚性衬套的短控制连接控制齿轮跨距,但这些刚性衬套可能不会有太大的隔振效果,整车NVH水平可以在优化万向节工作角度同时得到提高。
4 传动系统不平衡加工注意事项:
为了获得较好的传动水平,一下加工注意事项应考虑,下面给出的是基于实际观测到的整车传动情况下的建议统计规范,在整车测试和主观评价允许下,这些规范可以适当放松,如果NVH问题恰恰是和提到的部件有关,那么相应的设计更改就是必要的。
4.1 传动轴质量不平衡质量
不平衡可以在两端减少来保持平衡,对于传统的刚性传动轴,减少0.3Kg.mm就可以了,对于较轻的材料可以适当降低这个值,必须注意的是在运输和装配过程中我们应保持平衡状态。
4.2 轴向间隙
UJEP(万向节轴向间隙)会增加传动不平衡性,除了会造成离心力的不确定因素,还和CFRO有同样的影响,因为这个原因,它不能被点标示而且不能分度其他的部件,同时万向节将非常松弛而达不到旋转扭矩的要求,不均匀的旋转扭矩将会产生传动不平衡性。
4.3 焊接拨叉相位
传动轴的焊接拨叉相位相当重要,因为它会影响万向节的二节次激励,相位误差控制在3度以内。
4.4 复合式结合法兰的跳动
包括小齿轮在内的单个部件花键配合规范应该保证复合式结合法兰的装配应控制在0.12mm以内,这就相当于在传动轴和法兰盘质量为5kg时的0.3kg.mm的不平衡度。
4.5 小齿轮牙距错误
在轴内小齿轮的偏心量被视为节线跳动,在测量PLRO(节线跳动)时,不同的测试技术会得出不同的答案,一种测量径向距离的球形计量器被用来测量转过2个牙齿时球下降的距离,通过测量部分或所有配对的牙齿,一种代表PLRO(节线跳动)的偏差范围就出来了,这种测量技术的一个缺陷就是这个计量器不能测量转动与侧滑的综合影响,既然牙齿的传动和滑动面是用来分开准双曲面齿轮的运行,那么这个球形计量器就不可能将每个牙齿都精确的测量。
一个较好的方法就是测量单侧面的位置误差,这儿可用一个指示器从旋转轴或安装面以一定的距离指示牙齿的基准面。用一个带指针的装置旋转小齿轮一个理论齿距,然后重复测量。每次从指示位置读出的值就是误差大小的数值,定义第一个读数为0,读出总的测量值并得到一个范围就作为PLRO(节线跳动)的误差值,基于这种测量,PLRO值应保持在80mm以内。



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
