




 广告
广告





















































基于空气悬架“高度阀统一应用模型”的智能空气悬架系统

摘要
根据目前空气悬架高度阀应用实际情况,简要分析了诸如常规高度阀、快速排气高度阀以及多级高度调节 阀等各种不同类型高度阀和 ECAS 空气悬架系统各自的应用技术状态和特点。基于上述分析结果,率先提出了空 气悬架“高度阀统一应用模型”(UAM),该模型对目前所有商用车空气悬架系统中包括高度阀在内的阀类零部件 的应用状态进行了高度概括和统一。并以此模型为基础,设计出一种可自动调节长度的高度阀连杆,与最普通的高 度阀配合使用,在保留高度阀实时进、排气的优势下实现对气囊高度无级、多样化调节,再结合气囊压力监测装置 和中央处理单元,最终实现空气悬架系统的智能控制。
关键词:空气悬架;高度阀;UAM 模型;统一应用模型
前言
商用车空气悬架自诞生以来,除了ECAS系统之外,其它应用系统的基本工作原理和主体结构至今并无根本性变化,主要包括高度阀,高度阀纵向连杆以及气囊减震器等 元件。有一些全球化阀类制造厂为实现车身高度自动升降或侧跪,在普通高度阀基础上陆续设计出了可以实现气囊高度多级变化的多高度阀,这些阀结构复杂,尺寸较大、 成本也相对普通高度阀增加了三四倍。这些阀与ECAS系统一起,基本上涵盖了目前全球所有商用车空气悬架应用形态。
纵观上述所有的空气悬架应用形态,可以发现一个特点, 这些阀类产品有着千差万别的设计状态,但是,连接高度阀(或 ECAS 传感器)与车身(或底盘)的纵向连杆长度都是固定的。虽然它是设计成可以调节的,但是在实际应用中,只是偶尔手动调节一下,然后重新锁紧,其目的是为了补偿车辆装配误差造成的多个气囊之间的高度差异,在空气悬架正常工作过程中,该连杆长度保持固定不变[1]。
一、目前商用车空气悬架应用中的问题
1.1 多气囊高度调节阀
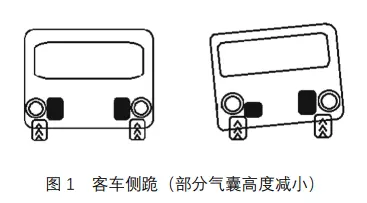
商用车驾驶室和底盘空气悬架中,最普通的高度阀仅能维持一个气囊高度,即正常情况下,车身相对底盘的高度始终不变[2]。实际应用中,当车辆通过限高杆时需要适当降低车身,或者通过坏路(或减速带)时需要适当抬高车身,或者客车需要进行侧跪(前跪)时需要降低部分气囊高度[3], 如图 1 所示。此时,需要对全部或部分气囊高度进行适当的调节,但普通高度阀无法做到这一点。因此,全球很多阀类厂家根据各种实际需求,开发了多种多样的多气囊高度调节阀。
这些产品的应用解决了气囊高度多样化的问题。但是,众所周知,这些产品相对普通高度阀的尺寸、重量和成本等方面均大幅增加。另外,为实现气囊高度调节功能,它们还需要布置相应的控制电路、气路等复杂的外围零部件和系统。这两方面的问题,将对各大车辆生产厂的整车总布置、轻量化设计以及成本控制等方面形成巨大挑战。同时,也会造成行业发展的瓶颈,不利于空气悬架在商用车领域的全面推广。
1.2 ECAS 系统
ECAS系统涵盖车辆气囊高度信息采集、信息处理、信号输出以及阀块进、排气等执行机构,对车辆空气悬架系统实现了精准控制。但是,其成本高昂、结构复杂、标定繁琐,售后维修需要专业人员完成,这对车辆生产厂的空气悬架推广应用同样具有负面作用。
另外,相对普通高度阀,ECAS无法对气囊的高度变化提供实时快速的响应。大量道路对比试验已经证明,高度阀快速的响应对驾乘舒适性存在有利的影响[4]。
二、空气悬架高度阀统一应用模型
2.1 传统空气悬架多气囊高度或系统实现的功能
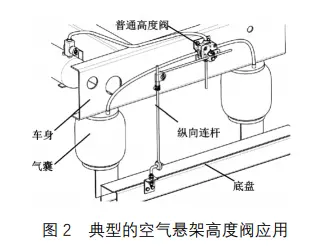
典型的商用车空气悬挂应用系统如图 2 所示。对于普通高度阀,气囊高度始终维持在一个值不变。
如果要改变气囊高度,则需要将普通高度阀更换为多气囊高度阀或系统,同时增加复杂的控制电路、气路等外围零部件和系统。目前的商用车空气悬挂应用场景中,多气囊高度阀或系统通常能实现下列单一或组合功能:
(1)锁闭气囊(防止气囊无压力时承载造成气囊损坏);
(2)比正常行驶高度高一些的第二行驶高度(便于通过坏路、减速带等障碍物);
(3)正常行驶高度(普通高度阀保持的高度);
(4)比正常行驶高度低一些的第二行驶高度(便于通过限高或获得更优空气动力学性能);
(5)排空气囊(最低位置);
(6)提升桥(多个气囊和阀组合实现);
(7)侧跪(多个气囊和阀组合实现);
(8)前跪(多个气囊和阀组合实现);
(9)整体升降(多个气囊和阀组合实现);
(10)气囊高度无极调节。
以上多种多样的功能,在现有的空气悬架应用策略下,显然无法用某个单一的系统将它们全部概括统一起来。但是,在适当改变现有应用的模式的某些固有技术特征之后,这种概括统一则变成了一种可能。
2.2 空气悬架高度阀统一应用模型
如前文所述,目前商用车空气悬架应用中,连接高度阀(或 ECAS 传感器)与车身(或底盘)的纵向连杆长度都是固定的。但是,当把这个纵向连杆长度看成可以实时调节的时候,将它与一只最普通的高度阀组合成一个简单的应用模型——空气悬架高度阀统一应用模型(UAM 模型)。可以发现,这个模型能很容易地描述前文所述的所有高度阀(含 ECAS)的应用形态,即,该模型可将上述所有应用形态概括统一起来。
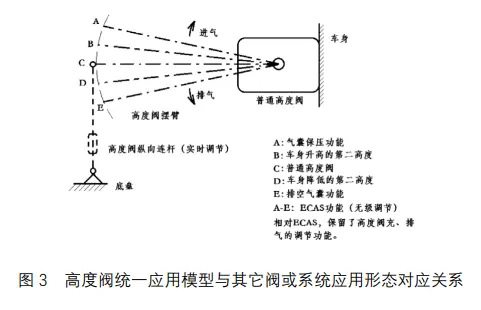
图 3 是空气悬架高度阀统一应用模型的各种应用形态与其它阀或系统的对应关系。此图只展示了单独一只高度阀的情形,对于需要多个气囊和高度阀组合实现的功能,将该模型简单叠加组合即可。
上述模型中,连杆长度在 C 位置时,高度阀维持气囊的正常高度。连杆长度在 A 位置(稍高于气囊拉伸极限位置)时最长,将使高度阀摆臂始终处于进气位置,气囊无法通过高度阀排气从而保持内压,此长度需要根据车桥和车身具体限位确定合适的值。当连杆长度位于 A 和 C 之间时,气囊(车 身)将会高于正常高度,当连杆长度位于 C 和 E 之间时,气囊(车身)将会低于正常高度,这两个第二高度具体取值, 同样要根据车身和车桥具体设计来确定。连杆长度在 E 位置 (稍低于气囊压缩极限位置)时最短,此时气囊排空。
特别注意,在确定 A 和 E 两个位置的连杆长度时,要仔细研究各个限位的几何尺寸并考虑高度阀的死区范围,为确保可靠地保持气囊压力或者可靠地排空气囊,应该在临界位置附近合理取值。
如果将该纵向连杆设计成连续可调节的,对于专业人员,可以设置合理调节步长,方便快速调整;对于一般驾驶员等非专业人员,则可在人机接口处,合理设置“一键到位”的按键,便于快速操作。
三、基于空气悬架“高度阀统一应用模型”的智能 空气悬架系统
3.1 基本原理和结构
如前文所述,上述空气悬架“高度阀统一应用模型”可以便捷地描述目前所有高度阀(含 ECAS)的应用形态,而且其在产品尺寸、重量、成本、简洁度等方面具有无可比拟的优势,因此,以此模型为基础建立一个商用车智能空气悬架系统具有较大可行性。
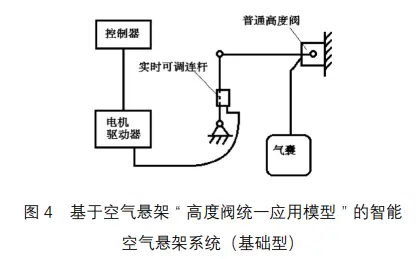
图 4 是不带压力监测的基础型应用原理图,操作者通过人机接口的控制器,在一定范围内自行调节部分或者所有气囊高度,快速实现车身高度的调节。
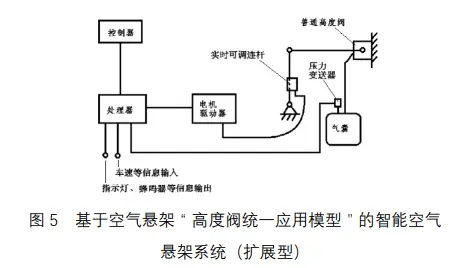
图5 是带气囊压力监测并采集车速等信息的扩展型应用原理图,操作者通过人机接口的控制器,在一定范围内自行调节部分或者所有气囊高度,快速实现车身高度的调节,但这些操作受限于气囊压力、车速等信息的限制,能更加确保调节过程不影响车辆安全性。同时,对车辆自身在焊接、装配过程中造成的累积误差具有更好的兼容性。另外,在气囊高度变化时,提供声光报警等提示信息。
3.2 关于人机接口的控制器功能
人机接口的控制器,应该能提供便利的操作,以便快速准确地调节气囊高度,同时也要防止操作者将气囊高度调节到极限状态(例如气囊高度过高,各个气囊高度偏差过大造成车身倾斜或扭曲)造成行车安全隐患。对于各个气囊,既要能单独调节,也要能组合部分或全部气囊统一调节,以实现侧跪、前跪、整体升降、提升桥等功能。
四、结论
商用车空气悬架应用是大势所趋,目前使用空气悬架高度阀或系统应用中,纵向连杆均是固定长度,这就造成了各种不同样式的空气悬架高度阀或系统。本文率先将纵向连杆变成可实时调节的形式,创立了一种简单模型——空气悬架高度阀统一应用模型(UAM 模型),将目前所有空气悬架高度阀或系统概括统一起来,并基于此模型,提出智能空气悬架系统的构想,以期推动整个空气悬架行业的技术进步和更广泛的应用。



编辑推荐




最新资讯
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
-
EMC成为新贸易壁垒,零跑在乌兹被全面叫停
2025-04-07 08:37
-
Euro-NCAP 2026 鞭打规程解读
2025-04-07 08:36
