




 广告
广告





















































海外洞察|AR-HUD: L2级自动驾驶故障下的视觉支持

【译者按】
2021年,国际权威期刊《IEEE Transactions on Intelligent Transportation Systems》发表了题为《AR-HUD: L2级自动驾驶故障下的视觉支持》的学术研究。该研究对L2级别自动驾驶故障期AR-HUD是否能有助于驾驶员接管车辆进行研究,选取了52名参与者进行驾驶模拟实验,考虑了横向和纵向两类故障类型,提出了基础和ARHUD两类HMI设计,并根据结果表明AR-HUD可以更好的支持驾驶员在L2级自动驾驶下遇到故障时的接管。国家智能网联汽车创新中心战略研究部对该研究进行了编译,期望对我国智能网联汽车发展提供帮助,并提出了具有针对性的HUD产业思考与发展建议。
【关键词】
AR-HUD HMI 自动驾驶 故障 接管
一、AR-HUD成为车内人机交互(HMI)的重要入口
HMI是应用在车辆上的人机交互系统,是人与汽车互动的通道,能够直接影响驾驶员驾驶过程。驾驶者通过该系统,获取车辆信息、车辆报警,并且进行车辆设置、实现娱乐功能等。驾驶员在驾驶的过程中接受信息的主要通道是视觉,其次是触觉和听觉,在信息接收和编码之后,通过人机交互行为表达出来。
在汽车发展初期,驾驶员与汽车交互,主要依靠仪表接收信息,通过仪表显示来了解车辆整体运行状态。但随着交互的智能化升级,显示和自动驾驶技术的发展以及ADAS的应用,HUD在提高驾驶员的安全性、舒适性和便利性上有非常明显的优势,逐渐成为车内驾驶员最重要的交互入口。
HUD是将车速、油耗、导航等信息显示在驾驶员正前方的平视显示系统,让驾驶员无需转移视线就可以便捷地查看行车关键信息,时刻保持注意力在路面,提升行车安全。HUD经历了从C-HUD(Combiner HUD)到W-HUD(Windshield HUD)再到AR-HUD的发展过程。
AR-HUD相较于传统HUD具有更大的优势,AR-HUD不仅可以帮助驾驶员掌握自身车辆信息,还能随时获取周围环境路况等外部信息。AR导航可实现基于实际道路的路线指引,提升复杂道路场景下的导航精准性;配合 ADAS在真实路况之上以醒目的方式,对行人、路障、交通标志标线、前向碰撞、车道偏离等情况进行标注和警示,便于驾驶员及时发现风险,减少驾驶员因为疏忽或者注意力不集中导致的安全风险。此外,在开启驾驶自动化功能时,AR-HUD融合ADAS信息,能够将车辆的自动驾驶信息即时呈现在驾驶员眼前,让驾驶员清楚知道车辆的目标和事件探测与响应状态行为,逐步提升对自动驾驶技术的信心与信任。
相比于传统的仪表和HUD,AR-HUD让驾驶员用最少的注意资源完成尽可能多的任务,减少分心和认知负荷所带来的安全隐患。同时,在使用AR-HUD时驾驶员对驾驶环境的关注度也更高,提高了自动驾驶时的感知程度,为接管提供了一定的便利。
二、研究内容:AR-HUD对L2级自动驾驶故障接管的影响
1.研究设计:2x2两因素混合实验
该研究采用两因素混合实验设计,首先定义了两种HMI概念:基线和AR-HUD(基线包含一个显示驾驶与自动驾驶最相关信息的仪表盘以及安装在挡风玻璃底部的LED灯条),以两种HMI概念(AR-HUD或者基线)作为组间因素进行比较。同时定义了两类故障场景:纵向故障场景和横向故障场景,作为被试内因素。
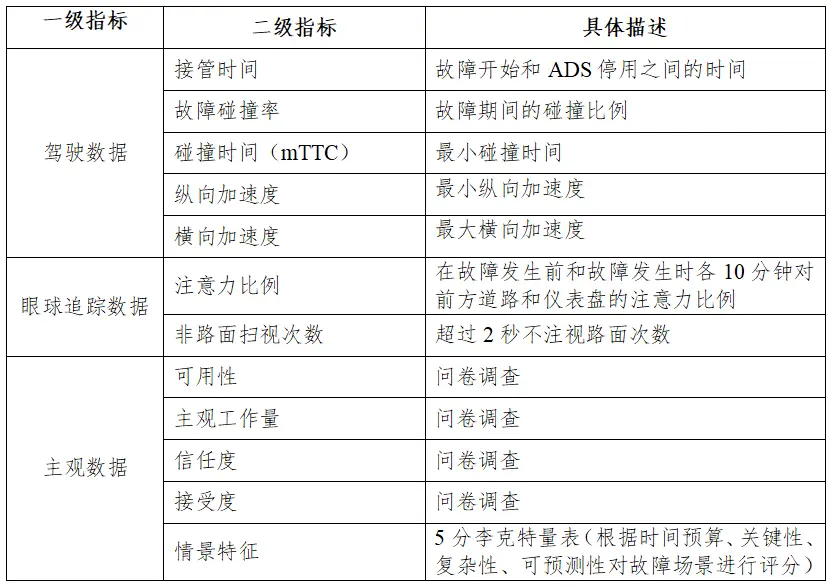
对于因变量方面,充分考虑了主观以及客观指标,主要分为驾驶数据、眼球追踪数据、主观数据3个一级指标,及12个二级指标以评估接管时间、接管质量、驾驶员注意力影响以及主观感受。
该实验轨道为27分钟的自动驾驶,包括7分钟的自动驾驶,在7分钟后出现两个十分钟的自动驾驶场景,包含横向或纵向的故障场景。共52名实验者,3名参与者中止,总共48个有效数据集。
表1 因变量指标
2.研究结论
(1)AR-HUD故障下接管时间更短,碰撞率更低
实验结果上,纵向故障中基线组和AR-HUD组的碰撞率分别是41.7%和25%,横向故障中基线组和AR-HUD组的碰撞率分别是83.3%和37.5%,AR-HUD在两种故障情况下发生碰撞的几率都大大减少,同时各组的横向故障的碰撞率大于纵向故障。根据实验数据结果进行统计分析(见表2),AR-HUD的接管时间均值更短,在横向和纵向故障下,AR-HUD在纵向故障下明显能够更快的响应,横向故障下AR-HUD可以帮助驾驶员更好的预测AV的轨迹,从而更快的识别必要的干预措施。
接管质量方面,由于根据纵向和横向加速度剔除了部分参与者,导致样本量过小,无法对加速度和mTTc进行分析。
表2 接管时间和质量相关指标的均值与标准差

注:横向故障因碰撞对象不在自动驾驶汽车车道内,因此缺少记录数据,无法确定横向故障的mTTC。
(2)驾驶员视觉注意力上,AR-HUD没有明显差异
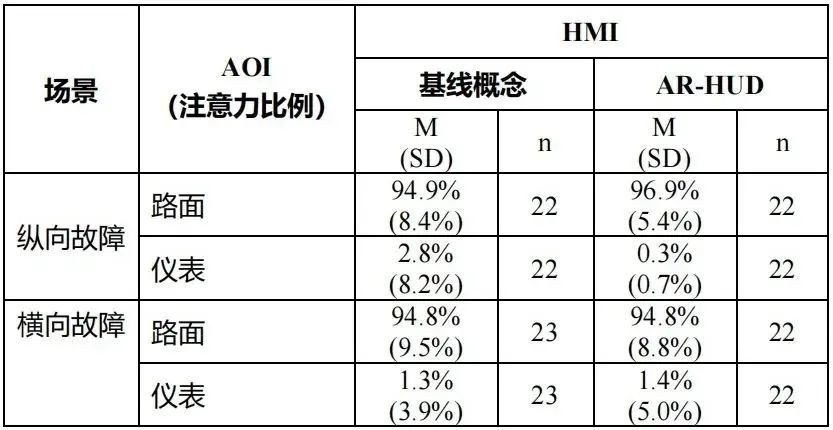
两组对前方道路都有高度的视觉关注(见表3),虽然基线组对仪表的注意力比例较高,但是对两组的非路面撇视次数(大于2秒)进行Mann-Whitney检验后,发现二组无显著差异(U=234.5,p=0.657)。所以,基线组对仪表盘的较高比例的注意力不会产生驾驶员长时间非路面撇视的影响。
表3 视觉注意力相关指标的均值与标准差
(3)AR-HUD可用性更高,驾驶员信任度有明显提升
研究结果显示,基线可用性均值M=66.04(SD=16.12),AR- HUD可用性均值M=73.85(SD=14.01),AR-HUD显著提高了可用性,驾驶员主观上认为AR-HUD在处理故障和监测自动驾驶方面更加有效、高效。在接受度上,两组没有显著差异。信任度方面,基线均值M=2.70(SD=0.58),AR- HUD均值M=3.00(SD=0.51),AR-HUD信任度更高。
三、思考与产业发展建议
1.AR-HUD提升智能汽车的信任感,建立人与系统之间的连接
安全是汽车发展的永恒主题,自动化、智能化的发展过程实质上也是安全功能不断升级的过程。出于对安全方面的担忧,公众对高度自动化的车辆普遍存在不信任。AR HUD可以作为实时显示系统状态的可视化媒介,能够实时传递路况信息和车辆状态,并对信息进行可视化处理,以清晰的视觉效果增加信息可读性,缩短驾驶员响应时间,提高驾驶安全性,提供自动驾驶汽车的可信度。
2.AR-HUD发展空间巨大,还需提升软硬件能力,跨领域协同发展新生态
随着智能网联汽车技术的发展,汽车不断逼近自动驾驶的形态,同时智能座舱的功能越来越丰富和个性化,这也为AR-HUD的应用提供了巨大的空间和使用场景。AR-HUD作为新型人机交互方式,新的交互方式意味着新的生态。但是,完整健康的生态体系需要产业链各环节之间相融相促以及推进,需要传感器数据融合、人工智能算法匹配、专属应用适配等软件能力与硬件能力共同协作。同时,这一发展将不仅仅局限在汽车自身的固有领域,将会有更多的软件、硬件公司,非汽车类的娱乐、服务等圈外企业加入进来。
本文译自:
译自:Augmented Reality Head-Up Display: A Visual Support During Malfunctions in Partially Automated Driving
本文作者:
中国汽车工程学会
国家智能网联汽车创新中心
中国智能网联汽车产业创新联盟
张懿坤



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
