




 广告
广告





















































如何应对场景库在自动驾驶测试验证中的挑战?

前言
不断提升场景覆盖度已经成为自动驾驶从量变到质变、向高级别持续演进的主要抓手。过往L2级及以下辅助驾驶系统的开发由技术驱动,但其在复杂道路场景的表现并不理想;随着高级别自动驾驶的发展,场景数据驱动的自动驾驶模型成为研发重点,在持续积累驾驶里程的基础上,连结数据流通的各个环节、构建面向自动驾驶算法开发与测试验证的数据闭环成为解决长尾问题、实现全场景自动驾驶的关键突破口。
行业已基本建立了支撑L2级辅助驾驶测试验证的场景数据库,但L3级及以上高级别自动驾驶对场景库提出了更高要求。当前,主要行业机构和部分企业已经基于道路采集、场景重构、深度学习等方法,构建了标准法规场景、自然驾驶场景、典型事故场景、预期功能场景等典型场景数据集,可以支撑L2级辅助驾驶功能的开发和验证。随着法规政策放开,国内自动驾驶等级从L2向L3跃升已成为不可逆转的趋势。此前L2级测试验证主要针对设定条件下某一功能的完成度及安全性,功能单一且场景数量要求少;而L3级测试验证则需要综合考虑车辆在完成自动驾驶时的安全性及接管条件,功能融合且涉及多车交互,场景复杂度显著提升。
面向高级别自动驾驶的测试验证需求,场景数据的生成方法与体系生态均需进一步优化完善:一是重点构建对自动驾驶模型性能提升有重大贡献的高价值场景,自然采集、经验复现、影子模式和智能合成等方法将实现优势互补,共同助力高价值场景的挖掘与生成;二是建设基于场景的验证体系与应用生态,建议行业共建共享高价值场景数据库,打通“仿真测试、场地测试、道路测试”验证体系,高效支持高级别自动驾驶安全测试。

1、重点构建高价值场景
在自然驾驶过程中,可能仅有一小部分关键场景和节点对自动驾驶环境感知、行为预测、决策规划等核心任务和整体模型开发和优化有贡献,因此,如何高效挖掘这些高价值场景(包括危险场景、边缘场景、特殊场景等)、提升识别与复现能力是未来高级别自动驾驶开发的关键基础支撑。
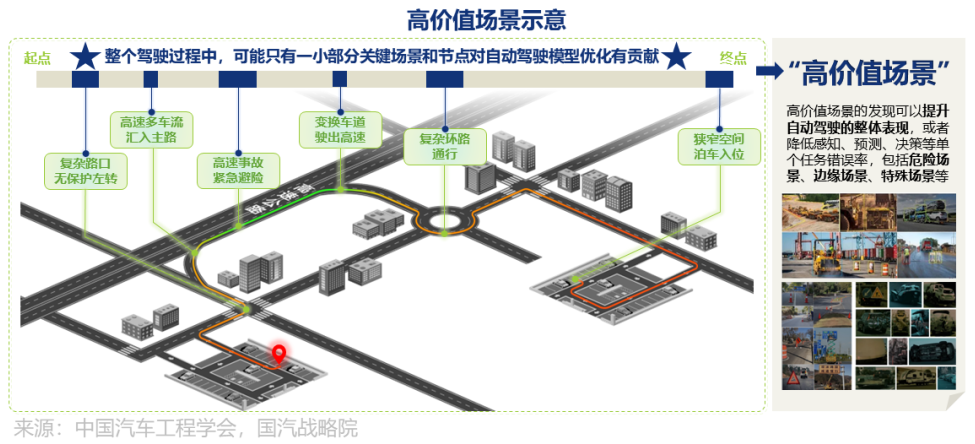
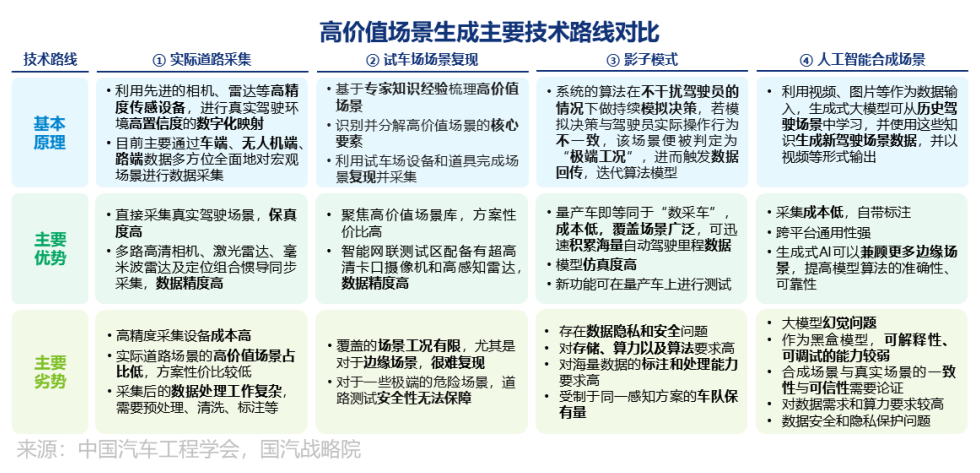
目前高价值场景生成的主要方法包括自然采集、经验复现、影子模式和智能合成等,未来各技术路线产生的真实数据与合成数据有望实现优势互补,共同促进自动驾驶高价值场景数据库的建立和丰富,协同助力高级别自动驾驶开发。
自然采集利用真值系统对实际道路数据进行采集和分析,真实度最高,是其他技术路线的重要基础。真值系统一般由高清摄像头、高性能激光雷达、毫米波雷达、高精度组合惯导等车载传感器外加高效的数据记录设备组成,可在车端、路端、无人机端部署,实现对真实行驶场景和交通流的高置信度数字化映射。该方法具有保真度高、数据精度高等优势,是进行场景泛化的理论基础,但由于采集设备成本高、实际道路中高价值场景占比低、后续数据处理工作复杂等原因,整体性价比较低。
试车场经验复现可显著提升高价值场景的构建效率,是进行自动驾驶功能测试验证的重要手段。该方法基于交通事故数据和自然驾驶数据的真实紧急事件以及专家知识经验梳理高价值场景,识别并分解其中的核心要素,再利用试车场设备和道具完成场景复现和数据采集,也可为自动驾驶汽车提供真实测试环境。试车场复现聚焦高价值场景,与自然采集方案相比更具性价比,但由于安全性难以保障等问题,仍无法覆盖极端边缘场景,特别是基于特殊天气和复杂交通参与者的危险紧急场景。
影子模式可收集真实世界中自动驾驶系统应对不佳的场景,是高效即时验证算法性能与应对表现的重要模式。影子模式由特斯拉率先提出并实现,其程序算法在后台持续基于感知数据模拟驾驶决策但并不参与车辆实际控制,若系统决策与驾驶员行为不一致,则触发场景数据回传,帮助云端模型完成算法修正和迭代。该方法利用量产车进行数据采集,具备采集成本低、场景覆盖广泛、数据积累迅速等优势,但也对车队保有规模、车端边缘计算能力、数据接入对比能力、数据智能处理能力、云端传输存储能力以及仿真平台搭建能力等提出了更高要求。
智能合成利用生成式人工智能大模型的学习与泛化能力,是未来边缘、极端、危险场景等高价值数据的重要来源。长久来看,高质量的真实数据会成为越来越稀缺的资源,生成式AI有望在很大程度上解决自动驾驶的“数据饥渴”问题,具有采集成本低、自带数据标注、跨平台通用性强、规避用户隐私问题等优势,甚至能有针对性地生成潜在危险场景和补充边缘场景,显著提升高价值场景的构建效率。目前,以DriveDreamer、GAIA-1为代表的世界模型因其理解复杂环境并和环境交互的能力,正在自动驾驶领域引起广泛关注,其不仅可以作为一种仿真工具来生成高质量驾驶场景视频,更有望成为自动驾驶的基石模型,助力感知决策一体化的端到端解决方案持续升级。
2、基于场景的验证体系与应用生态
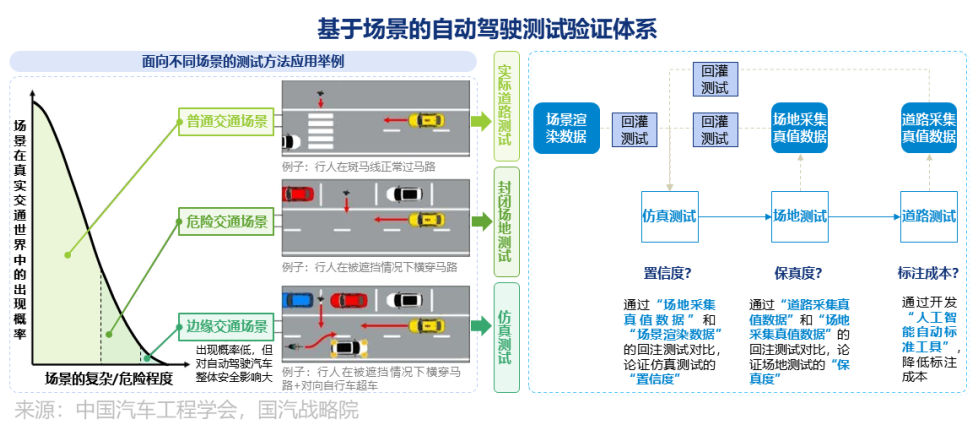
虚拟仿真测试、封闭场地测试、开放道路测试是评估自动驾驶安全的三种重要手段。与传统车辆相比,影响自动驾驶汽车的安全因素、场景变量显著增加,传统的场地测试和台架测试难以评估影响安全的所有变量,因此世界汽车组织(OICA)创造性地提出了自动驾驶汽车“仿真测试、场地测试、道路测试”相结合的测试体系,综合缩短测试时间、危险测试可重复、交通参与者可交互等优势,兼顾低成本和高保真,协同助力自动驾驶的安全测试。
以场景数据为抓手,打通“仿真测试、场地测试、道路测试”,实现自动驾驶在不同测试模式下的高效对比验证。对于每一类确定的高价值场景,可首先采用仿真测试快速确认应对的最优策略,确定其关键参数的分布区间及其典型值,再通过场地复现的方式验证仿真测试的置信度;场地测试的保真度则通过场地测试和道路测试的真值数据回灌测试对比来验证。
共建开源开放、脱敏脱密、感知方案相对统一的高价值场景数据库将有利于加快全行业的自动驾驶开发进程。由于危险场景等高价值场景在真实道路测试过程中发生概率的较低,同时其场地复现难度也较大,因此基于实车真值采集并泛化的高价值场景数据库,是行业内稀缺的资源,建议整车企业、科技公司、高校、检测机构以及智能网联示范区可以共同组建高价值场景数据开放联盟,推动建设基于统一感知方案的场景数据库,实现数据自循环应用,形成统一测试评价标准与流程,建设符合准入要求的测试能力和管理体系,助力自动驾驶功能与性能表现持续优化升级。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
