




 广告
广告





















































标准发布丨ASAM OpenDRIVE 1.8.0

2023年11月,ASAM OpenDRIVE 1.8版本正式发布。作为ASAM自动驾驶仿真体系中的重要环节,本次ASAM OpenDRIVE 1.8版本具体包含了什么内容?相对于之前的版本究竟有哪些改进和提升?让我们共同来研究!
01 OpenDRIVE标准概述
ASAM OpenDRIVE描述了驾驶仿真应用所需的静态道路交通网络(以下简称路网)并提供了标准交换格式说明文档。该标准的主要任务是对道路及道路上的物体进行描述。OpenDRIVE标准涵盖对道路、车道、交叉路口等内容进行建模的描述,但其中并不包含动态内容(动态部分内容由OpenScenario标准进行规范)。
OpenDRIVE格式使用文件拓展名为xodr的可扩展标记语言(XML)作为描述路网的基础。存储在OpenDRIVE文件中的数据描述了道路的几何形状以及可影响路网逻辑的相关特征(features),例如车道和标志。OpenDRIVE中描述的路网可以是人工生成或来自于真实世界的。OpenDRIVE的主要目的是提供可用于仿真的路网描述,并使这些路网描述之间可以进行交换。
2016年,德国联邦经济与能源部(BMWi)启动PEGASUS项目,旨在开发一套自动驾驶功能测试程序,以促进自动驾驶技术的快速落地。PEGASUS项目内容包括定义自动驾驶车辆在仿真、测试场地以及实际环境中的测试与实验标准流程;开发一个持续的和灵活的工具链以维护自动驾驶开发与验证;在开发早期的阶段集成测试;创建跨整车厂的方法来维护高度自动驾驶功能等。
PEGASUS项目于2019年5月结项,其中一项重要研究成果就是Open-CRG、OpenDRIVE、OpenSCENARIO驾驶场景仿真格式标准。该标准已于2018年正式从戴姆勒和VIRES转交ASAM进行下一步标准维护与开发。以此为契机,ASAM于2018年新开创一类标准——仿真,用于制定和协调自动驾驶领域的相关仿真标准。
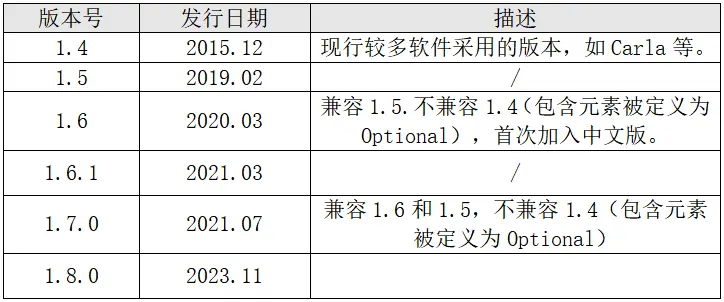
OpenDRIVE的版本更新历程如下表所示:
02 ASAM ASAM OpenDRIVE 1.8标准有哪些更新?
ASAM OpenDRIVE 1.8.0主要更新了以下内容:
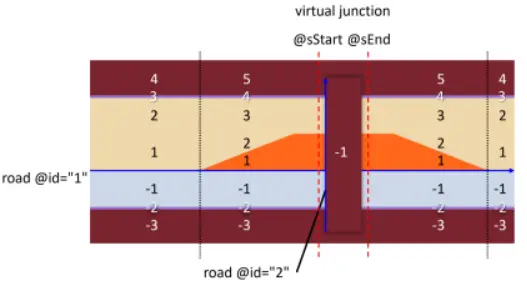
2.1 交叉路口优化
增强了交叉路口文件的可互换性,并且简化了建立交叉路口的过程。
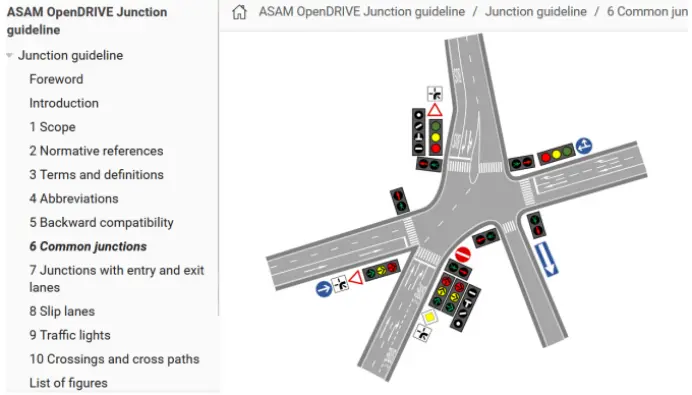
交叉路口展示
2.2 匝道优化
OpenDRIVE新增了匝道类型,并明确描述在哪里放置交汇点,以及何时使用入口和出口。
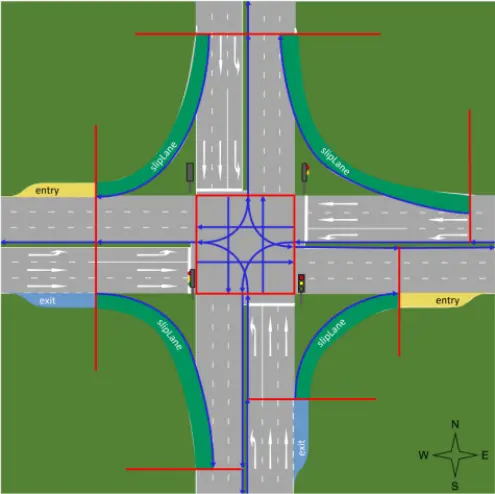
匝道描述优化
2.3 信号灯与停车线优化
在OpenDRIVE 1.5版本之后,弃用了物理位置(physicalPosition)来描述信号灯,转而采用标志依赖(signal dependency)和引用(reference)进行描述。
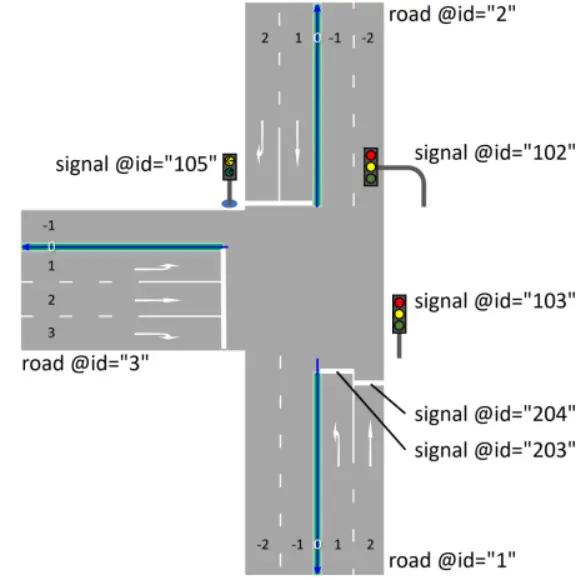
信号灯与停车线优化
通过OpenDRIVE1.8.0的优化,可以实现:
• 更简单、更统一的交通流仿真与控制
• 当交通信号灯放置在其实际位置时,传感器检测更容易
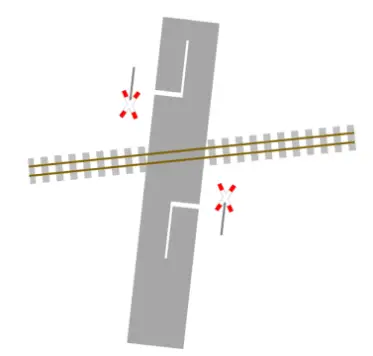
2.4 新增交叉路口形式
本次OpenDRIVE 1.8.0新增了以下2种新的交叉路口形式:
铁路与道路交叉;
人行道、自行车道与道路交叉
2.5 新增高程格网(Junction elevation grid)概念
高程格网为交汇点边界内的每个点提供和覆盖高程定义,是z值位于均匀分布点处的粗正方形格网。高程格网解决了连接具有不同 z 值和间隙的道路的问题。
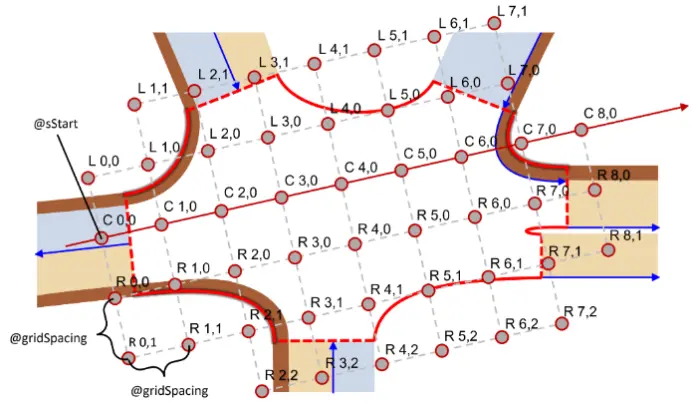
高程格网要求在每个方向上定义交汇点边界外的完整正方形。
最小高程格网由四个点组成,其中z值在交汇点边界周围形成一个方形边界框。如果四个点具有相同的z值,则此最小高程格网将提供具有恒定高度的平面。
2.6 新增物体骨架(Object Skeleton)概念
为了将物体描述得更加具体,OpenDRIVE 1.8.0新增了物体骨架(Object Skeleton)概念,即物体对象可以使用骨架折线(Skeleton Polyline)在此边界框中描述其形状。
该骨架可以通过一系列具有半径或宽度和高度的点来定义对象的适当部分。它还增加了定义@intersectionPoint属性的可能性,以描述该对象接触道路或地面的位置。
注意:只有具有特定 @type 属性值的对象才能使用这些骨架折线进行描述。
元素用作元素的包装器,而包含用于描述该折线不同点的其他元素。
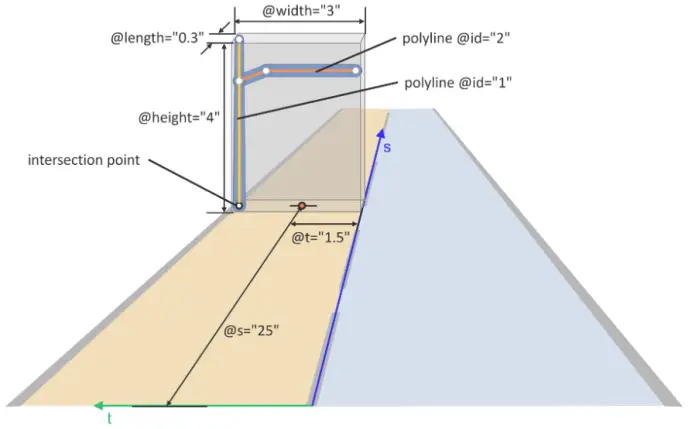
信号灯骨架折线示意
上图显示了一根交通灯杆的骨架折线,其延长臂横跨道路,可以用两条单独的折线来描述,一根用于定义交叉点的主杆,另一根用于延长臂。
2.7 道路高程描述优化
在OpenDRIVE 1.8.0中,道路高程的描述得到了进一步优化,目前可以实现多种情况的高程描述:
道路高程指定沿道路参考线的高程,即s方向的高程(elevation)。
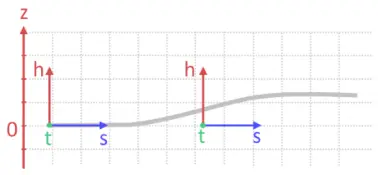
高程 Elevation
横向剖面图指定与道路参考线正交的高程,即t方向的高程(superelevation)。
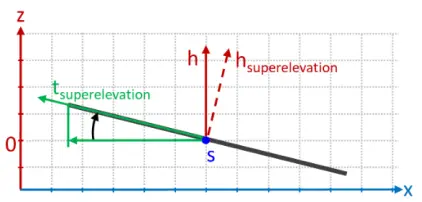
超高程 Superelevation
对于更加复杂的道路(如潮汐车道)情况,可以同时描述s方向和t方向高程来实现。
多种高程结合描述
2.8 道路标牌描述优化
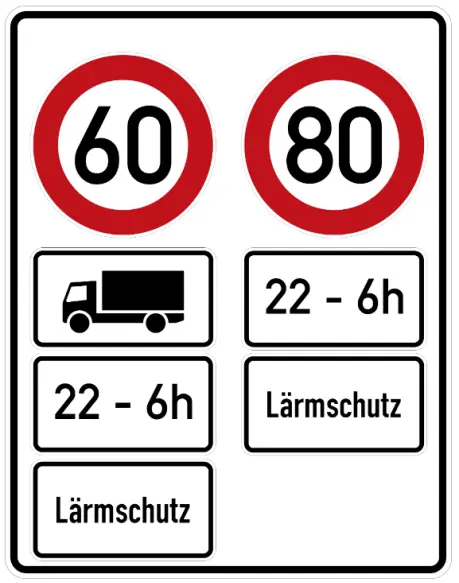
在之前的OpenDRIVE中,已经可以描述多种类型的交通标牌。但是在实际道路上,交通标牌并非总是独立的单块标志,多个信号标牌聚合在同一块信号板上的情况越来越普遍。下图就是一块典型的复杂道路标牌:
因此,OpenDRIVE 1.8.0优化了道路标牌的描述,使其可以描述以下类型:
静态标牌 @type=“staticBoard”
@type=“vmsBoard” 多参数道路标牌(variable message board)
由静态和动态信息混合的道路标牌 @type=“multiBoard”



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
