




 广告
广告





















































车辆学院李骏院士团队在自动驾驶安全性在线监测方面取得突破性进展

自动驾驶安全第一。清华大学车辆与运载学院李骏院士团队提出包含AI算法健康状态在线检测、ODD边界在线检测以及道路交通法规符合性在线监测技术构成的自动驾驶车载预期功能安全防护系统。近日,团队王红副研究员具体提出了道路交通法规数字化及符合人类驾驶员行为分布的合规性阈值选取新方法,在道路交通法规符合性在线监测方面取得突破。
研究团队认为,道路交通法规作为人类总结的最成体系的驾驶经验和安全驾驶底线,自动驾驶遵循道路法规是其最基本安全要求。然而现有道路交通法规是面向人类驾驶员的自然语言法规,其天然的模糊性,尤其是部分条例的模糊表述,使得各自动驾驶汽车企业对其理解不同,进而导致自动驾驶汽车的行为出现分歧。让自动驾驶汽车在各种情况下像人类驾驶员一样遵循自然语言编写的道路交通法规仍然是一个难题。
为解决这一问题,李骏院士团队提出了自动驾驶“合规性在线监测”技术,该技术所构建的系统独立运行于自动驾驶系统,通过获取自动驾驶汽车行为信息来判断车辆行为是否合规。该技术提出了一套道路交通法规数字化方式和基于触发的分层合规性在线监测架构,该架构通过设置触发条件保证不同法规条例在恰当的运行环境下触发,并且方便扩充及容纳数字化后的不同地域驾驶经验及规则;同时,还提出了“No Crash”和“No Change”的合规性模糊阈值选取准则,通过数据集分析了人类驾驶员在面对模糊法规时的行为分布,并基于准则选取了符合人类驾驶员行为的合规性阈值。

车辆合规性在线监测系统架构
研究团队基于可用数据集,依据各交通法规条例涉及的约束、阈值及监测类型选取了高速路与十字路典型条例为例,分析了包括“不得骑、轧车行道分界线或者在路肩上行驶”、“变更车道的机动车不得影响相关车道内行驶的机动车的正常行驶”和“转弯的车辆不得妨碍被放行的直行车辆、行人通行”等涉及模糊阈值的条例,确定了包括最大允许压线时间、换道时与前车的最小TTC(Time To Collision)、换道时与目标车道后车的最小允许距离和左转与直行车辆冲突时最小允许时间差等合规性阈值。
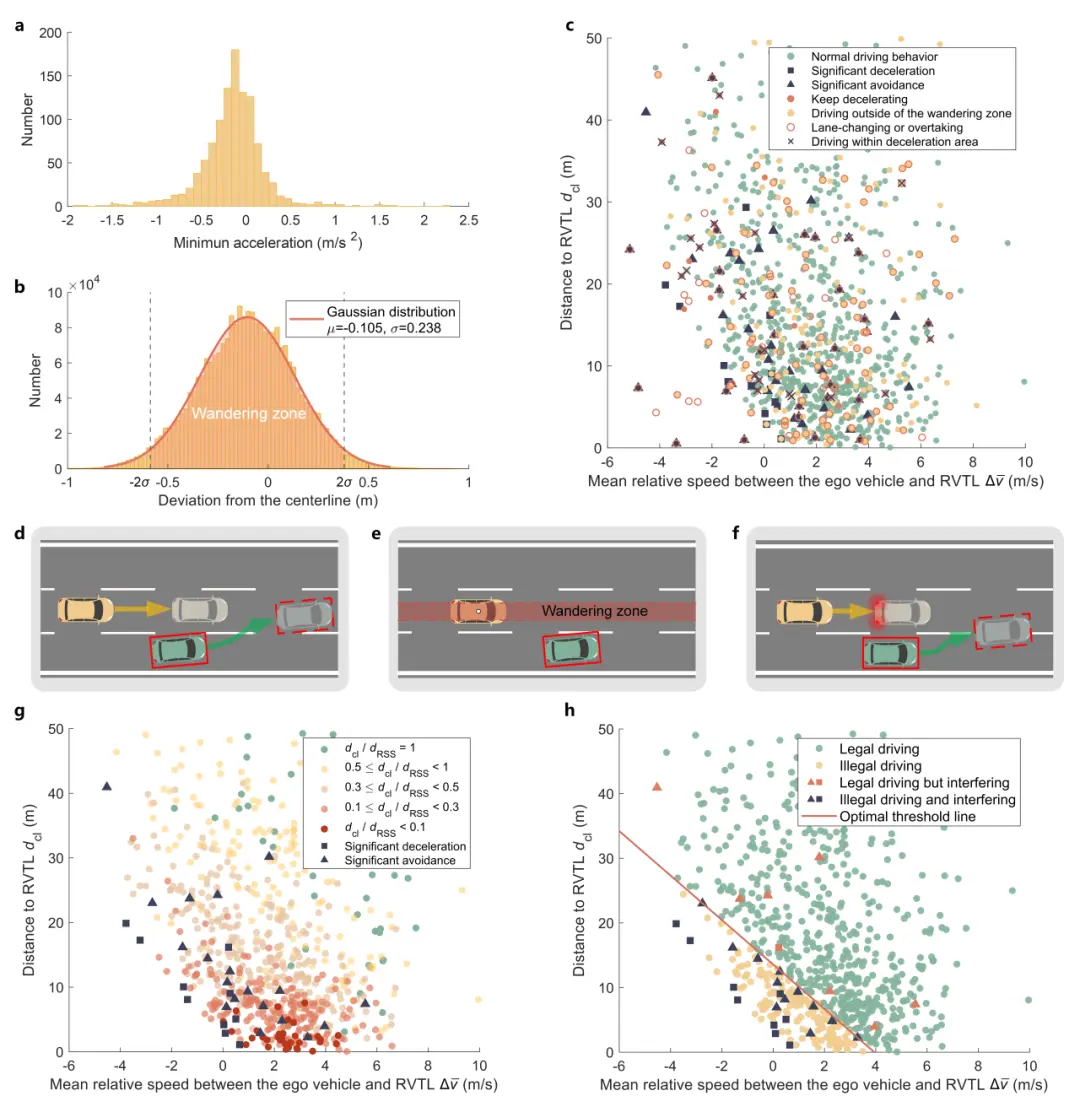
高速工况模糊阈值分析过程及结果
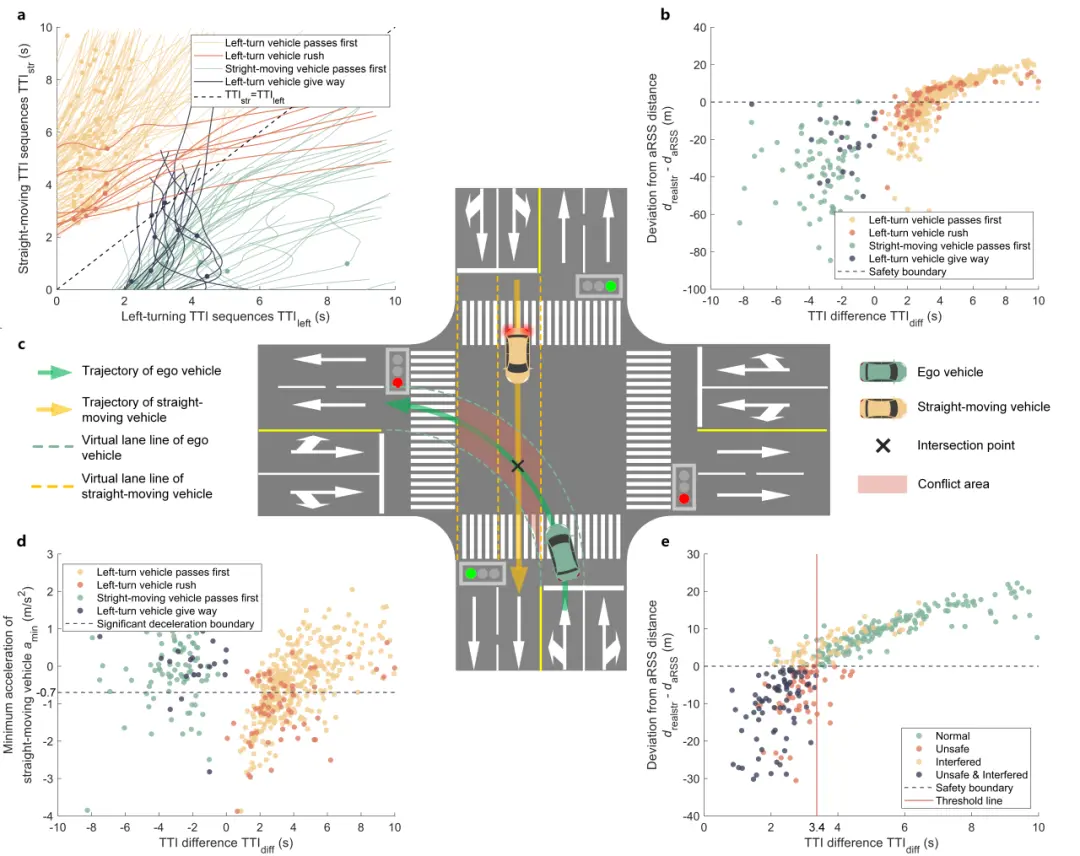
城市路口工况模糊阈值分析过程及结果
研究团队在仿真和实车测试过程中对该技术进行了验证。基于大疆车载与吉林大学主导的AD4CHE数据集与清华大学主导的SIND数据集的验证表明该技术可以有效发现车辆违规行为;基于实车测试的结果表明该技术可与自动驾驶系统无缝集成,并能够在保证实时性的情况下提供稳定准确的结果。这一技术突破是自动驾驶汽车合规性数据闭环的重要一环,让自动驾驶汽车具备融入现有交通体系的可能。

合规性在线监测实车测试结果
该技术在科技部重点研发计划项目中得到了成功应用,部署于解放J7商用车进行实车验证。研究团队正在进一步完善自动驾驶合规性监测方法,以满足该技术在闭环测试与开环验证方面的覆盖度与可靠性要求。

相关研究以“online legal driving behavior monitoring for self-driving vehicles”为题发表在《自然·通讯》(Nature Communications)上。清华大学车辆学院博士后于文浩为第一作者、来自北京理工大学的联合培养学生赵成祥为共同第一作者,清华大学车辆学院王红副研究员为本论文的通讯作者、重庆大学胡晓松教授为共同通讯作者,北京理工大学王伟达教授和美国卡耐基梅隆大学赵鼎教授在研究过程中给予大力支持。作者团队在本领域近几年的研究还得到了公安部道路交通安全研究中心、大疆与吉林大学张玉新老师开源数据集的指导性建议与支持。本研究得到国家科技部重点研发项目、国家自然科学基金项目支持。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
