




 广告
广告





















































汽车雷达与模拟仿真系统影响的相互干扰预期水平评估

译文
汽车雷达与模拟仿真系统影响的相互干扰预期水平评估
原文 : ESTIMATING EXPECTED LEVELS OF MUTUAL INTERFERENCE IN AUTOMOTIVE RADAR AND SIMU-LATING SYSTEM IMPACTS
本文的主要目标是评估由于其他雷达发射器入射到给定汽车雷达的接收天线上的期望功率,其次,模拟这可能对示例雷达系统性能产生的影响。该方法使用随机几何方法来衡量空间、时间和频谱重叠,以适应多部雷达近距离工作的现实场景。结果表明,给定的雷达接收天线可能面临比用于指定系统性能的参考目标所期望的更大的干扰功率(10~50dB)。在这些条件下,没有干扰缓解策略的雷达系统可能会遭受显著的性能下降。
01 介绍
汽车工业正在经历一场根本性的变革,而这一切都是由电子、通信和遥感技术的大量进步所促成的。人们正在开发具有不同自动驾驶程度的汽车,以提高效率、减少拥堵、提高安全性,并为以前依赖他人帮助的团体提供可靠的交通工具。
本文提供了简化表达式来估计汽车雷达随着其装备车辆的渗透率增长的情况下必须运行的环境。在其他雷达很少的环境中运行良好的系统性能有可能在在雷达拥挤的环境中会引起严重的下降。结果表明,基于当前系统在拥挤环境中运行的受干扰程度将是显著的。基于本文中的模型,在许多车辆操作76-81GHz频段雷达的情况下,来自其他雷达的功率可能会超过指定目标所需的回波功率性能几个数量级。
建模和仿真工作主要围绕两个问题展开:
◆ 一台给定的雷达从其他雷达发射器接收到多少功率?
◆ 这将如何影响碰撞预警系统的性能?
第一个问题是通过开发标称汽车雷达模型并计算空间、时间和频谱上的功率重叠量来解决的。这项工作是在理论上完成的,假设RF波在自由空间传播。
第二个问题是通过在系统仿真中引入作为噪声干扰的计算功率来解决的。这种方法在过去的研究中很常见,并且假设干扰雷达的波形本质上不同,因此它们的相互能量不相关。这里采用这种方法的部分原因是,它需要对接收雷达前端后面的信号处理链进行最少的假设。为了量化可能的系统影响,处理功能基于与行业专业人士合作开发的通用模型,并在MATLAB的自动驾驶系统(ADS)工具箱中进行仿真。出于这个原因,这里的方法并没有捕捉到系统影响,这取决于与不同波形可能发生的大量相互作用。
虽然雷达干扰是一种众所周知的现象,并且已经研究了几十年,但人们对雷达干扰何时以及如何影响高级驾驶辅助系统和自动驾驶汽车发展的关注相对较新。2010年1月,欧洲资助的雷达干扰缓解项目(MOSARIM)开始实施,其主要目标如下:
◆ 调查可能的汽车雷达干扰机制;
◆ 评估可能的对策和缓解技术。
研究侧重于模拟和经验测量,以确定干扰水平,评估缓解策略。
和MOSARIM的研究一样,许多其他的研究人员也对这个问题的研究做出了贡献为本研究提供了咨询。本研究的新颖之处在于,它代表了对现实交通场景的平均干扰功率的端到端估计,并对MATLAB ADS工具箱进行了修改,以模拟系统影响。
02 雷达模型
为了计算雷达的干扰水平,我们必须为被测系统以及干扰系统创建一个模型。该模型必须具有足够的保真度,以估计入射到接收孔径上的功率量。为了建模和仿真的目的,根据雷达规格选择的值,建立了通用远程汽车雷达的参数。
发射器在距离R处到达接收天线的功率PRx是发射器功率PTx、发射天线增益GTx(发射波长λ)和接收天线增益GRx的函数。这就是Friis公式,表示为(式1)。

单基地雷达距离方程计算了与发射器同位的雷达接收功率,观测了具有雷达横截面的目标返回的能量σ。其表达式为(式2)。

雷达距离方程显示的是雷达回波的R4路径损耗,而不是来自另一台雷达的传输损耗的R2路径损耗。
用于汽车雷达应用的远程雷达通常期望能够探测和跟踪前方超过100米的车辆。通常,雷达性能是针对100米处雷达横截面为0dBm2的参考目标指定的。雷达的系统噪声是噪声因子fN和热噪声的乘积,热噪声是工作温度T、接收器带宽B和玻尔兹曼常数k的乘积,表示为(式3)。

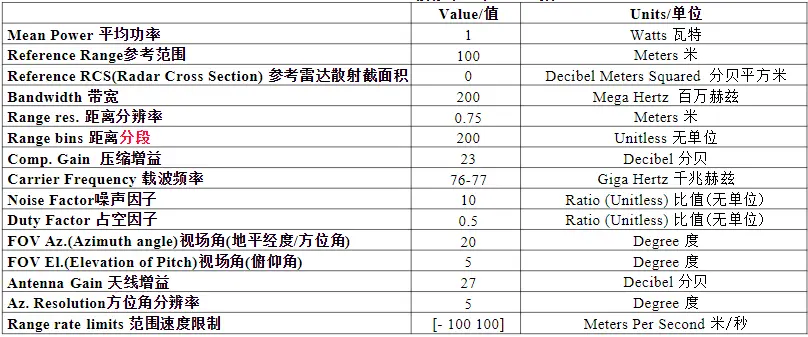
本文使用的值如表1所示。根据雷达距离方程和表1的值,参考目标每脉冲的信噪比为14.1dB,如(式4)所示。SNR值在脉冲压缩之前。在脉冲压缩之后,时间带宽积提高了信号功率。在我们的仿真中,这是由将信号功率压缩到目标距离分段中,并在距离分段中均匀分布噪声功率来考虑的。

表1 用于通用远程雷达模拟干扰水平的参数
03 干扰模型
本节详细介绍了我们回答“给定雷达从其他雷达发射器接收多少功率?”的方法。
给定接收器所经历的预期干扰需要在频谱、时间和空间上估计其他车辆雷达传输的拦截概率(POI)。
必须对如何选择雷达载波频率和脉冲调度进行假设。在本文中,拦截概率POI基于中心频率的选择是随机的、均匀分布的、在频带内,并且在其他车上的系统之间不存在不同步的假设。
一对雷达的光谱POI是基于它们占用的可用频带的数量,或信道分数。也就是说,一个200MHz的系统,工作在76~77GHz频段,其信道分数为0.2。对于很多操作系统来说,信道分数可以小一个数量级,因为瞬时带宽被选择得相对较窄。对于K个雷达,每个雷达的光谱POI为ξK,如下(式5)所示。

K个雷达的时间POI遵循类似的推导,但控制参数是干扰对DF1和DF2的占空因子。对于K个雷达,时间POI和τK如下(式6)所示。

时间谱重叠就简单地是两者的乘积,如(式7)所示。

相互干扰涉及多个雷达。正在考虑的雷达被定义为本雷达。为了计算本雷达的干扰功率I1,我们遵循的方法,如(式8)所示,这需要指定平均干扰密度λ,发射器功率P0,雷达对的时谱-重叠因子,ξ2,在车道间距为L的道路上离本雷达距离的最小值 L ,具有FOV θ的干扰源必须照亮本雷达接收器δ=L/tan(θ/2) ,频率相关增益项为 。
。

在这种随机几何方法中,期望的干扰水平在干扰雷达上进行积分,因此时间-频谱重叠是成对的。在结果一节中计算了一个例子。
04 系统模型
为了估计干扰对碰撞预警系统的影响,该研究引入了干扰功率,在干扰模型(8)中计算,并将干扰传输作为不相关噪声引入。这种方法在过去的研究中很常见,并且假设干扰雷达的波形本质上不同,因此它们的相互能量不相关。这需要对接收雷达前端后面的信号处理链进行最低限度的假设。
虽然该方法忽略了干扰信号可能产生的影响即产生假轨迹(幽灵目标),但噪声升高的影响对硬件架构的依赖程度较低。
为了量化可能的系统影响,处理功能基于与行业专业人员合作开发的通用模型并在MATLAB的ADS工具箱中进行仿真。该方法可以适用于更高保真度的模型、具有特定品牌和型号雷达的特定信号处理链。然而,在本研究中,系统模型是旨在展示对通用但合理的雷达系统的影响,其他研究人员可以通过访问ADS工具箱来复制该系统。
为了对配备高级驾驶员辅助传感器的车辆进行建模,有必要能够实例化、操纵和支持场景中各个组件之间的交互。这里描述的这个框架包括:
◆ 道路定义;
◆ 场景参与者,包括行人和车辆;
◆ 参与者在场景中的动作;
◆ 车辆传感器定义和布置;
◆ 传感器检测模型;
◆ 支持将检测组合成轨道。
该模型必须能够提取与车辆位置、检测和跟踪信息相关的每个时间步长的信息,并根据不断变化的场景条件在每个时间步长的基础上修改检测器的响应。
对于我们的模拟,我们实现了如图1所示的处理流程。
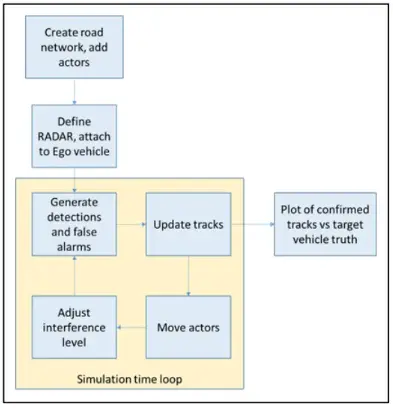
图1 仿真流程图
为了实现我们的模拟,我们选择使用MATLAB平台(来自MathWorks),并附带ADS工具箱。ADS工具箱于2017年推出,提供了我们所需的大部分功能。在这些情况下,它没有提供所需的接口,必要扩展的实现被证明是直截了当的。
道理和车辆生成
ADS工具箱提供了定义道路、参与者(车辆和行人)以及这些参与者的运动配置文件的方法。道路由两车道路段构成,由沿路段的一组笛卡尔坐标(x, y, z)中心点定义。中心点由分段的曲面曲线连接。
本文涉及三类车辆:
1. 本车辆是干扰的主体;
2. 对象是目标车辆,本车辆跟随性能以此为基准进行评估;
3. 干扰车辆是指场景中其他带有主动雷达的车辆。
车辆通过指定一组路点和速度添加到道路上。这些路点和道路中心一样,是笛卡尔坐标。这些显示的示例如图2所示。在这种情况下,本车辆是蓝色的,干扰车辆是黄色的。
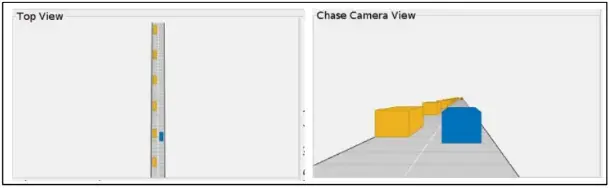
图2 车辆显示为蓝色,干扰物显示为黄色
传感器的定义和布置
传感器安装在车辆上,传感器一旦连接上,就会随着车辆在道路上行驶而运行。每个传感器都有一个更新率,用于控制传感器产生的检测次数,传感器的更新率可能与场景(如车辆的移动)的更新率不同。
模拟中使用的这些参数值,如表1所示。本车载雷达方位视角显示,如图3所示。
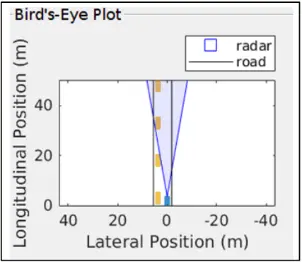
图3 雷达波束方位视角俯视图
检测建模
目标的可探测性受三个相互关联的参数制约:误报概率(PFA)、探测概率(PD)和信噪比(SNR)。误报概率与允许发生的误探测次数有关,为确保探测到真实目标,必须允许一定数量的误报。在模拟中,误报概率被设置为1e-6,这意味着每1000000次探测就会出现一次误报。这个PFA值是根据限制误报的行业惯例,选择在对Albersheim方程有效的PFA值(1e-7
一旦设定了可接受的误报水平,就可以通过接收器工作特性曲线(ROC)来确定PD和SNR之间的关系。ROC是根据人们熟知的雷达反射现象推导出来的。在ADS工具箱中,假定雷达反射来自非波动目标,具有非相干脉冲积分,通过Albersheim的探测方程生成。虽然这种反射模型足以满足许多用途,但如果允许花费更多的时间和精力,可以用Snidman方程中更丰富的模型来取代该方程,该方程基于Swerling模型,可提供由目标的潜在非均质散射机制集合产生的波动响应。
检测按时间步骤生成。首先,场景中的演员被移动到当前位置。然后,为场景生成点目标。感兴趣区域(ROI)由雷达的方向和视场定义。如图 5 所示,ROI根据方位角和测距分辨率所定义的最小间距进行细分(在这些模拟中,仰角分辨率为无穷大,即不能通过高度来区分响应)。行为体表示为6边立方体。在任何时候,雷达最多只能看到行为体的三个侧面。只要行为体的侧面占据了ROI的一个细分区域,就会生成点目标。
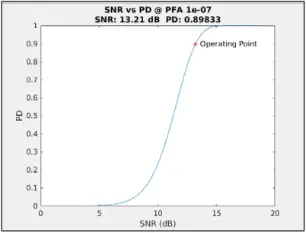
图4 给定理想PFA时信噪比和PD的ROC曲线示例
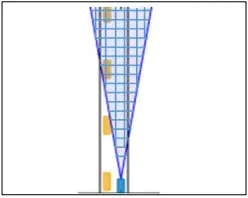
图5 细分雷达波束以识别点目标响应的示例
每个点目标都有一个雷达截面(RCS)值。这是目标在给定角度下的理想响应,不考虑传感器与目标之间的距离。每个角色都会分配一组RCS值,这些值会随照射角度的不同而变化。对这组RCS值进行内插,以获得给定目标在每一时间步照明角度下的点目标响应。在模拟中,所有车辆在所有角度下的RCS值均为10 dBsm,先前的研究发现,这是对车辆横截面的良好估计。
然后根据测距率排除点目标。测距率是雷达辨别本车辆与目标车辆之间相对距离变化的能力。这种能力的限制来自雷达发射脉冲的速率,由预期最大车辆速度、最大射程范围和雷达系统成本之间的工程权衡决定。超出最小/最大测距率的点目标将被视为虚假目标而被忽略。
由于目标的RCS没有考虑传感器与点目标之间的距离,因此必须将这一数字转换为点目标的信噪比SNR。每个点目标的信噪比(SNRT),由目标射程相对于参考射程的目标RCS与参考RSC和双向传播损耗(R-4)两个比值的乘积来调整,如(公式9)所示。

产生的误报总数是通过计算雷达一次扫描的分辨率单元总数乘以误报率得出的。如果产生误报,则从均匀分布中随机选择误报的范围和方位角位置。假定误报是边际检测,因此每个误报的信噪比都是根据检测阈值水平应用中的Albersheim方程设定的。最后,将误报与目标探测结果归为一组雷达探测结果。
然后将雷达探测结果输入跟踪算法,尝试将当前的探测结果与之前的探测结果和轨迹进行归类。无法归入先前轨道的当前探测结果将用于创建新轨道。被分配到新探测结果的先前轨道会得到更新和确认。任何没有获得新探测结果的轨道最初都会被平移,如果后续无法获得探测结果,则最终会被删除。ADS工具箱和本文使用的默认跟踪器是恒速线性卡尔曼滤波器。
用于确定雷达在存在干扰和噪声的情况下探测目标能力的主要指标是终端跟踪距离。这是目标连续跟踪的最大范围。换句话说,这是雷达最初探测到目标并在模拟结束时保持该轨迹的距离。
05 示例场景
如下图6所示,在一条双车道高速公路上,相向行驶的汽车上的前视雷达会产生干扰。干扰是在本车辆上测量到的,如蓝色所示。干扰源是黄色汽车上的雷达,即干扰车辆,行驶方向相反。干扰对系统的影响将通过本车辆检测和跟踪“目标”车辆 -- 绿色汽车的能力来评估。

图6 示例场景示例图
(蓝色的本车辆使用前视雷达跟踪绿色的目标车辆,
本车辆受到反方向行驶的黄色车辆上雷达的干扰)
自车以80kph的速度行驶,目标车在前方200米处,以20kph的速度行驶。两车将在12s后相撞。对向车道上的干扰车辆呈泊松分布,平均间距为15m。车道间距设定为3.7m,这是美国道路的名义中心到中心间距。
06 结果
通过代入由车道间距和雷达参数决定的所有其他参数值,可以计算出干扰是对向车流密度的函数。用下面的值代替(4)中的变量:ξ2= 0.1,P0=1W,y1=2.794*10-2m2,δ=20.98m,and L=3.7m,可以得到本车辆雷达的干扰功率I1与对向车道上干扰车辆平均间距的函数关系表达式(公式10)。

在这种情况下,干扰功率与干扰车辆的间距成反比。如果对向车道上车辆之间的平均间距为15m,则(5)中的干扰功率估计为-51dBW。为方便起见,假定雷达对使用的波形明显不同,脉冲压缩后,功率均匀分布在200个范围分段上。因此,每个测距分区受到的干扰功率约为-73 dBW。参考目标是100m处的0 dBsm目标,使用相同的雷达参数,它在100m处的测距仓中的回波功率为-107 dBW。
在模拟系统中,通过观察与目标之间形成终端轨迹的距离,可以用图形显示对性能的影响。终端轨迹意味着在发生碰撞之前保持相同的轨迹。在没有干扰的情况下,目标车辆在196m的距离上形成了终端轨迹,如图7所示。在这两种情况下,随着目标车辆方位角的改变,都会形成额外的轨迹。
这意味着,如果不大幅降低干扰,该示例汽车雷达系统在ADAS应用方面的性能将大打折扣,因为其到达目标的距离仅为参考目标规格的11%。不过,需要强调的是,本示例旨在强调通用雷达模型的方法。
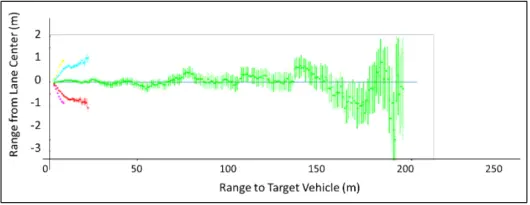
图7 无干扰远程雷达示例场景中的终端目标轨迹图
(该图显示了从自车到目标车辆之间的航迹位置和不确定性)
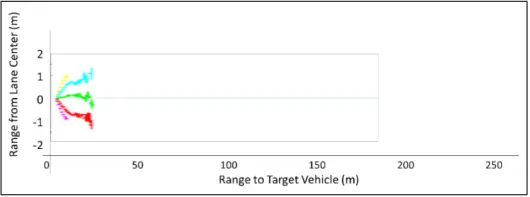
图8 在76-77GHz波段情况下,来自场景1
(有干扰的远程雷达)的持续目标轨迹图
(该图显示了从自车到目标车辆之间的航迹位置和不确定性)







最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
